

Решив эту систему, получим
ХА= Р cos 60° - Q cos 30° = -123 Н,
RС= (-Q cos 60° AE + P cos 30° AB)/AC = 48,7 Н,
УА =Q cos 60° + RС - P sin 60° = 62,2 Н.
Taк как величина ХA получилась отрицательной, следовательно, действительное направление этой реакции противоположно ее направлению на схеме.
Пример 2. Определить реакции опор А и В балки, на которую действуют две сосредоточенные силы P1, P2 и равномерно распределенная нагрузка интенсивностью q (рис. 5.9). Размеры на рисунке даны в метрах, P1 = 2 кН, Р2 = 3 кН, q = 0,6 кН/м.
Р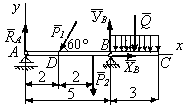 ешение.
Рассмотрим равновесие балки. Заменим
распределенную нагрузку ее равнодействующей
— сосредоточенной силой Q,
равной
ешение.
Рассмотрим равновесие балки. Заменим
распределенную нагрузку ее равнодействующей
— сосредоточенной силой Q,
равной
Q = q·ВС = 0,6·3 = 1,8 кН и приложенной в средине отрезка ВС.
Рис. 5.9 Отбросим связи: подвижную шарнирную опору А и неподвижную шарнирную опору В, заменив их реакциями RА, ХВ, УВ. Балка находится в равновесии под действием плоской системы сил P1, P2,, Q, RА, ХВ, УВ. Проведя оси координат, как это показано на схеме, составим уравнения равновесия этой системы сил:
(1) ; - Р1 cos60° + ХВ = 0,
(2) ; RA - Р1соs30˚- Р2 + УВ – Q = 0,
(3) ; -Р1 cos 30˚·AD – Р2АЕ +УВ·AB - Q -
- (AB+BC/2)=0.
Решив эту систему, получим
ХВ =P1 cos 60° = 1 кН,
УВ =P1 cos 30°AD/AB+Р2АЕ/АВ+Q2AB+ВС/(2АВ)=5,43 кН,
RА= P1 cos 30° + Р2 + Q - Уb = 1,2 кН.
5.5. Равновесие системы тел. Примеры решения задач
Рассмотренные условия равновесия твердого тела применимы и для исследования равновесия механической системы, состоящей из п твердых тел, соединенных между собой (сочлененных) с помощью различных связей: шарниров, нитей, соприкасающихся поверхностей и т. д. Такие связи называются внутренними в отличие от внешних связей, которые связывают рассматриваемую систему с телами, в нее не входящими.
Д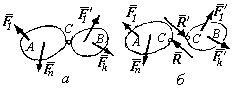 ействительно,
если система находится в равновесии,
то в равновесии находятся и все тела
данной системы. Поэтому мы можем каждое
тело освободить от наложенных на него
внешних и внутренних связей, заменив
их соответствующими реакциями, и
рассматривать равновесие каждого
тела, используя уже знакомые нам условия
равновесия. При этом надо иметь ввиду,
что внутренние силы взаимодействия
между телами системы (активные и
реакции внутренних связей) по аксиоме
о равенстве сил действия и противодействия
обязательно равны по модулю и
противоположны по направлению. Так,
освобождая тело А (рис. 5.10) от
внутренней связи в шарнире С и
заменяя действие этой связи реакцией
,
мы должны к телу В, с
ействительно,
если система находится в равновесии,
то в равновесии находятся и все тела
данной системы. Поэтому мы можем каждое
тело освободить от наложенных на него
внешних и внутренних связей, заменив
их соответствующими реакциями, и
рассматривать равновесие каждого
тела, используя уже знакомые нам условия
равновесия. При этом надо иметь ввиду,
что внутренние силы взаимодействия
между телами системы (активные и
реакции внутренних связей) по аксиоме
о равенстве сил действия и противодействия
обязательно равны по модулю и
противоположны по направлению. Так,
освобождая тело А (рис. 5.10) от
внутренней связи в шарнире С и
заменяя действие этой связи реакцией
,
мы должны к телу В, с
Рис. 5.10
которым соединяется тело А
шарниром С, приложить силу
![]() ,
равную реакции
по модулю и противоположную ей по
направлению.
,
равную реакции
по модулю и противоположную ей по
направлению.
Из свойства внутренних сил системы вытекает, что условия равновесия твердого тела справедливы и для равновесия системы сочлененных тел.
Действительно,
после освобождения каждого тела системы
от наложенных на него внешних и
внутренних связей и замены их
соответствующими реакциями, на тело
будут действовать часть внешних сил
системы (![]() ,
j = 1, 2, ... , m)
и часть внутренних сил (
,
j = 1, 2, ... , m)
и часть внутренних сил (![]() ,
j =1,2, ..., р), образующих
уравновешенную систему сил. Представим
главный вектор
,
j =1,2, ..., р), образующих
уравновешенную систему сил. Представим
главный вектор![]() и
главный момент относительно точки О
и
главный момент относительно точки О
![]() сил, действующих на k-e
тело, в виде сумм двух слагаемых:
сил, действующих на k-e
тело, в виде сумм двух слагаемых:
![]() ;
;
![]() ,
,
где
![]() и
и
![]() —
сумма внешних сил и сумма внутренних
сил системы, действующих на k-e тело;
аналогично
—
сумма внешних сил и сумма внутренних
сил системы, действующих на k-e тело;
аналогично
![]() ,
,
![]() .
По условиям равновесия
.
По условиям равновесия
![]() ,
,
![]() ,
k =1,2,…n
,
k =1,2,…n
Просуммируем эти равенства по всем телам системы:
![]() ,
,
![]() .
.
Здесь
![]() и
и
![]() —
главный вектор и главный момент внутренних
сил системы, которые по свойству
внутренних сил системы равны нулю;
—
главный вектор и главный момент внутренних
сил системы, которые по свойству
внутренних сил системы равны нулю;
![]() ,
,
![]() главный вектор и главный момент внешних
сил, действующих на систему сочлененных
тел.
главный вектор и главный момент внешних
сил, действующих на систему сочлененных
тел.
Таким образом, при равновесии системы сочлененных тел главный вектор и главный момент относительно произвольной точки внешних сил, действующих на систему, равны нулю:
![]() ,
,
![]() 0,
0,
что совпадает с условиями равновесия одного тела. Аналогичными будут условия равновесия и части системы, состоящей из нескольких тел.
Следовательно, при исследовании равновесия системы сочлененных тел, уравнения равновесия составляются как для нерасчлененной системы, так и для какой-либо ее части и отдельного тела системы. При этом число независимых уравнений равновесия, которое можно составить для системы п сочлененных тел, зависит от типа действующей на систему нагрузки: при действии произвольной пространственной системы сил число независимых уравнений равновесия равно 6п, при действии плоской системы сил 3п. Если число этих уравнений равно числу неизвестных (реакций внешних и внутренних связей, неизвестных внешних сил и геометрических параметров), то все неизвестные определяются из условий равновесия и задача, а также рассматриваемая в ней конструкция, будет статически определимой. В противном случае задача является статически неопределимой.
П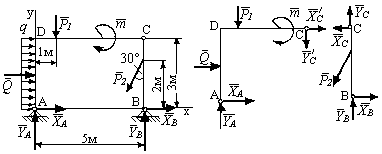 ример
1.
Два невесомых стержня ADC
и ВС
соединены
ример
1.
Два невесомых стержня ADC
и ВС
соединены
а) б)
Рис. 5.11
между собой шарниром С и закреплены неподвижными шарнирами в точках А и В (рис. 5.11, а). На систему действуют силы Р1 = 10 кН, P2 = 20 кН, равномерно распределенная нагрузка q = 4 кН/м и пара сил с моментом т = 50 кН·м. Размеры даны на схеме. Найти реакции опор А и В, а также усилие в шарнире С.
Решение.
При решении задачи будем рассматривать
равновесие сочлененной системы
стержней ADC
и ВС.
Построим на схеме внешние активные
силы и моменты, заменив распределенную
нагрузку сосредоточенной силой Q
=q·3=12
кН, приложенной посредине участка АD.
Проведем оси координат, отбросим опоры
и заменим их реакциями
![]() (рис.
5.11, а).
На конструкцию
действует плоская система сил, число
неизвестных равно шести:
и две составляющие реакции шарнира С.
Для каждого
стержня можно составить три уравнения
равновесия, т. е. всего шесть, и поэтому
рассматриваемая система статически
определима.
(рис.
5.11, а).
На конструкцию
действует плоская система сил, число
неизвестных равно шести:
и две составляющие реакции шарнира С.
Для каждого
стержня можно составить три уравнения
равновесия, т. е. всего шесть, и поэтому
рассматриваемая система статически
определима.
Составим три уравнения равновесия нерасчлененной системы:
(1) =ХА+ХВ+Q-P2 sin30°=0,
(2)
![]() = YA+YB
-
P1
-
P2
cos
30° =0,
= YA+YB
-
P1
-
P2
cos
30° =0,
(3)
![]() =
- YA·5
- Q·1,5
+ P1·4
- т + Р2
sin
30°·2= 0.
=
- YA·5
- Q·1,5
+ P1·4
- т + Р2
sin
30°·2= 0.
Из уравнения (3) находим
YA = (P1·4 + P2 sin 30°·2 - m - Q·1,5)/5 =1,6 кН,
а из уравнения (2) получаем
YB = -YА +Р1 + Р2 cos 30° = 28,9 кН.
В уравнение (1) входят две неизвестные XА и ХB, и для их определения надо составить дополнительные уравнения равновесия, расчленяя систему и рассматривая равновесие какой-либо ее части.
Расчленим
систему на составные элементы, то есть
отделим стержень ADC
от стержня ВС
(рис. 5.11, б)
и приложим к ним в шарнире С
попарно равные и противоположно
направленные внутренние реакции
![]() .
Составим уравнения равновесия стержня
ВС
(система сил, приложенных к этому стержню,
проще):
.
Составим уравнения равновесия стержня
ВС
(система сил, приложенных к этому стержню,
проще):
(4) = ХВ –ХC -P2 sin30°=0,
(5) = YC+YB - P2 cos 30°=0,
(6)
![]() =
XB·3
- Р2
sin
30°·1= 0.
=
XB·3
- Р2
sin
30°·1= 0.
Из уравнения (6) наxодим ХB = Р2 sin 30°/3 = 3,3 кН, из уравнения (5) получаем
YC= Р2 cos 30°- YB =11,6 кН,
из уравнения (4) находим
ХC = XB – Р2 sin 30° = -6,7 кН,
и, наконец, из уравнения (1) получаем
ХA =-ХB - Q + P2 sin 30° = -5,3 кН.
Величины YA, XA и ХC отрицательны; следовательно, эти силы в действительности направлены противоположно изображенным на рисунке.
Для решения задачи можно было составлять и другие уравнения равновесия, например, расчленив систему на элементы ADC и ВС и составив уравнения равновесия каждого элемента.
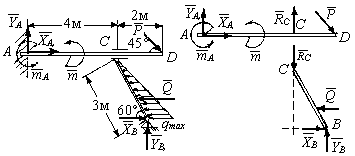 Пример
2.
Два стержня AD
и ВС
(рис. 5.12, в) соединены скользящим шарниром
(ползуном) С.
Опорами системы служат заделка А
я неподвижный
шарнир В.
На систему действуют сила Р
= 20 кН, пара сил, с моментом т
= 60 кН·м и распределенная по закону
треугольника нагрузка с максимальной
интенсивностью qmax=20
кН/м. Размеры даны на схеме. Найти реакции
заделки A,
шарнира В
и ползуна С.
Пример
2.
Два стержня AD
и ВС
(рис. 5.12, в) соединены скользящим шарниром
(ползуном) С.
Опорами системы служат заделка А
я неподвижный
шарнир В.
На систему действуют сила Р
= 20 кН, пара сил, с моментом т
= 60 кН·м и распределенная по закону
треугольника нагрузка с максимальной
интенсивностью qmax=20
кН/м. Размеры даны на схеме. Найти реакции
заделки A,
шарнира В
и ползуна С.
а) б)
Рис. 5.12
Решение. Конструкция и действующая на нее система сил являются плоскими. После замены внешних связей реакциями мы получим систему cил, изображенную на рис. 5.12, а. Сила , равнодействующая распределенной нагрузки, приложена на расстоянии 1 м от точки приложения qmax и равна
Q =½ qmax ·ВС =30 кН.
Если
мы будем составлять уравнения равновесия
для системы в целом, то, как нетрудно
видеть, в каждое из них войдет не менее
двух неизвестных реакций, что усложнит
вычисления. Поэтому расчленим систему
и рассмотрим равновесие каждой ее части
в отдельности (рис. 5.12, б).
Скользящий шарнир С
не допускает относительных перемещений
стержней только в направлении,
перпендикулярном стержню AD,
так что его реакция
![]() направлена перпендикулярно этому
стержню. Составим уравнения равновесия
стержней, причем для стержня ВС
используем вторую форму уравнений
равновесия плоской системы сил.
направлена перпендикулярно этому
стержню. Составим уравнения равновесия
стержней, причем для стержня ВС
используем вторую форму уравнений
равновесия плоской системы сил.
Для стержня AD:
(1) = ХА + Р cos 45°=0
(2) =YА+Rc-P cos 45°=0,
(3)
![]() = mA
+ т
+ RC·4
- Р
cos 45°·6 = 0
= mA
+ т
+ RC·4
- Р
cos 45°·6 = 0
Для стержня ВС:
(4) =XB –Q =0
(5) =RC· 3 cos 60° + Q·1·cos 30° = 0,
(6) = YB·3 cos 60°+Q·1·cos 30°=0.
Решая полученную систему шести уравнений, находим тA= 93,7 кН·м, XA= -14,1 кН, YA=31,4 кН, XB=30 кН, Yв = -17,3 кН, RC = -17,3 кН. Реакции ХA, YB, RC на схеме изображены неверно; в действительности они противоположны показанным на рисунке.