

Вопросы для повторения
1. Что называется силовым полем?
2. Какое силовое поле называется стационарным?
3. Какое силовое поле называется потенциальным?
4. При каких условиях существует силовая функция?
5. Как определяется работа потенциальной силы на конечном перемещении точки ее приложения?
6. Как связаны между собой силовая функция и потенциальная энергия силы?
7. Чему равна механическая энергия системы материальных точек?
8. Когда механическая энергия системы остается постоянной?
9. Как изменяется механическая энергия системы при действии на нее диссипативных сил?
5. Статика
5.1. Условия равновесия системы сил, приложенных к твердому телу
Как было указано ранее (п.4.1) статикой называется раздел кинетики, в котором изучаются операции преобразования систем сил в эквивалентные им и условия равновесия механических систем под действием приложенных к ним сил. Здесь мы будем рассматривать только условия равновесия твердого тела по отношению к инерциальной системе отсчета.
С равновесием механической системы и, в частности, твердого тела непосредственно связано понятие равновесия системы сил. Система сил находится в равновесии (является уравновешенной), если, будучи приложенной к свободному абсолютно твердому телу, находящемуся в равновесии, она не выведет тело из этого состояния.
Состояние движения
(а, следовательно, и состояние покоя как
частного случая движения) твердого тела
полностью определяется двумя его
векторными мерами движения: количеством
движения
![]() и кинетическим моментом относительно
какой-либо неподвижной точки О
и кинетическим моментом относительно
какой-либо неподвижной точки О
![]() .
Это означает, что движения двух одинаковых
твердых тел при одинаковых начальных
условиях будут идентичны, если в каждый
момент времени их количества движения
и кинетические моменты относительно
одного и того же центра будут соответственно
равны между собой. В самом деле, количество
движения определяет движение центра
масс тела (п. 4.4), а кинетический момент
- еще и вращение тела вокруг его центра
масс (п. 4.5). Таким образом, если количество
движения и кинетический момент
относительно неподвижного центра
твердого тела равны нулю и в начальный
момент тело неподвижно, то это означает,
что тело находится в покое по отношению
к рассматриваемой системе отсчета.
.
Это означает, что движения двух одинаковых
твердых тел при одинаковых начальных
условиях будут идентичны, если в каждый
момент времени их количества движения
и кинетические моменты относительно
одного и того же центра будут соответственно
равны между собой. В самом деле, количество
движения определяет движение центра
масс тела (п. 4.4), а кинетический момент
- еще и вращение тела вокруг его центра
масс (п. 4.5). Таким образом, если количество
движения и кинетический момент
относительно неподвижного центра
твердого тела равны нулю и в начальный
момент тело неподвижно, то это означает,
что тело находится в покое по отношению
к рассматриваемой системе отсчета.
Используя теоремы об изменении количества движения и кинетического момента:
![]() ,
,
![]() ,
,
найдем необходимые и достаточные условия равновесия системы сил, приложенных к твердому телу.
Пусть свободное твердое тело находится в покое при действии на него системы внешних сил ( ). Тогда скорости всех его точек равны нулю и, следовательно, тождественно равны нулю его количество движения и кинетический момент относительно любой неподвижной точки, то есть
= const = 0,
= const = 0.
Поэтому
![]() =0
и
=0
и
![]() =0
и мы получаем необходимые условия
равновесия системы сил:
=0
и мы получаем необходимые условия
равновесия системы сил:
![]() =0,
=0,
![]() =0
=0
Эти условия будут и достаточными. Действительно, пусть свободное твердое тело, на которое не действуют силы, находится в покое, то есть в этот момент нач= 0, нач= 0.
Приложим к нему
систему сил, главный вектор и главный
момент которой относительно точки О
равны нулю (![]() =0,
=0,
![]() =0).
Состояние покоя тела не нарушается, так
как и количество движения, и кинетический
момент тела сохранят свои нулевые
значения:
=0).
Состояние покоя тела не нарушается, так
как и количество движения, и кинетический
момент тела сохранят свои нулевые
значения:
![]() =
0, откуда
= const =
нач=
0,
=
0, откуда
= const =
нач=
0,
![]() =0,
откуда
= const =
нач=
0.
=0,
откуда
= const =
нач=
0.
Следовательно, для равновесия системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы ее главный вектор и главный момент относительно любой неподвижной точки пространства были равны нулю:
= 0 , = 0. (5.1)
Полученные уравнения представляют собой векторные условия равновесия произвольной системы сил, приложенных к твердому телу. Для вывода аналитических условий проведем через точку О систему координат Oxyz, спроектируем на оси этой системы уравнения (5.1) и получим
![]() ,
,![]() ,
,![]() ,
(5.2)
,
(5.2)
![]() ,
,
![]() ,
,
![]() .
.
Полученные уравнения и являются аналитическими условиями равновесия произвольной системы сил. Таким образом: для равновесия произвольной системы сил, приложенной к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма проекций этих сил на каждую из трех осей координат равнялась нулю и чтобы алгебраическая сумма их моментов относительно каждой из этих осей также равнялась нулю. Данные условия называются также уравнениями равновесия свободного твердого тела, так как этими равенствами пользуются для определения неизвестных сил, входящих в задачи статики.
В случае исследования равновесия несвободного тела пользуются аксиомой связей, на основании которой тело с наложенными на него связями можно считать свободным, если мысленно отбросить связи и заменить их действие на тело реакциями связей. Основные типы связей уже рассматривались в п. 4.1.3, но здесь стоит напомнить их (рис. 5.1). Это: гладкая поверхность (рис. 121, а), шероховатая поверхность (рис. 5.1, б), гибкая нерастяжимая нить (рис. 5.1, в), невесомый жесткий стержень (опора А на рис. 5.1, ж), цилиндрический и сферический шарниры (рис. 5.1, г и 5.1, д соответственно), подпятник (рис. 5.1, е), подвижная шарнирная опора (опора В на рис. 5.1, ж) и, наконец, заделка (рис. 51, з) для случая системы, активных сил, действующих в плоскости чертежа.
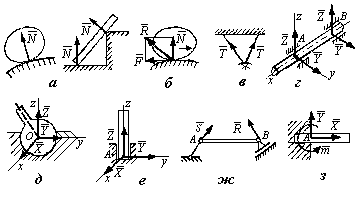
Рис. 5.1
В результате решения задач статики, т. е. исследования равновесия твердого тела, определяются неизвестные силы (активные и реакции связей), обеспечивающие равновесие тела, геометрические параметры механической системы, обеспечивающие ее равновесие, или положения равновесия механической системы. При этом число неизвестных величин не должно превышать количества уравнений равновесия. Если это условие выполняется, то задача называется статически определимой. В противном случае задача становится статически неопределимой и для ее решения необходимо принимать во внимание деформации тел. Такие задачи рассматриваются в курсе сопротивления материалов.