

2. Методические материалы для обоснования конструкции привода главного движения
2.1. Электродвигатели
Для приводов главного движения в современных станках в качестве источника движения применяются регулируемые электродвигатели разных типов, позволяющие бесступенчато регулировать частоту вращения шпинделя и автоматически устанавливать необходимую скорость резания в соответствии с режимами резания. При этом механическая часть привода существенно упрощается.
Регулируемые электродвигатели позволяют менять частоту вращения выходного вала от нуля до некоторой максимальной величины nmax(для конкретного электродвигателя своя максимальная частота), но при этом выходные силовые характеристики двигателя меняются. Типовая диаграмма силовых возможностей регулируемых электродвигателей приведена на рис. 2.1. В зонеIрегулирование частоты вращения двигателя от нуля до номинальной частотыnНпроисходит при постоянном номинальном крутящем моментеМН. Мощность двигателя при этом возрастает от нуля до номинального значенияNН, которое является максимальным.
В зоне IIчастота вращения ротора регулируется отnНдоnmaxпри постоянной номинальной мощностиNН, а моментМНпри этом уменьшается.
Зона IIIхарактеризуется дальнейшим ростом частоты вращения ротора с падением мощности и крутящего момента. Данная зона регулирования в станках практически не используется, или используется в крайне редких случаях, например, для обеспечения высокой шероховатости на обрабатываемой поверхности при очень малых припусках на обработку.

Рис. 2.1. Зависимость предельной мощности N и предельного момента М на выходном валу ротора электродвигателя от частоты вращения n
Выявить зоны регулирования можно по технической характеристике электродвигателя. Для двигателей постоянного тока серии 2ПФ и 4ПФ такие характеристики приведены в табл. П3 и табл. П5 (см. прил. 6), в которых для каждой марки двигателя указаны номинальная и максимальная частоты вращения.
В первой зоне регулирования с постоянным моментом МНна выходе изменение частоты вращения двигателя осуществляется изменением напряженияUот нуля доUН, а в зонеII(рис. 2.1) – изменением магнитного потока от ΦНдо Φmin. Такое управление двигателем удобно в практическом отношении, что отчетливо видно из формулы частоты вращения электродвигателя постоянного тока:
![]() ,
,
где U– напряжение постоянного тока;J–сила тока в обмотках якоря;R– сопротивление цепи якоря;C– конструктивная постоянная двигателя; Ф – магнитный поток возбуждения двигателя.
В настоящее время в отечественном станкостроении находят применение регулируемые асинхронные электродвигатели двух разновидностей. Первая разновидность – это специальные электродвигатели для приводов главного движения станков фирмы «Siemens» (Германия) серии 1PH7 и 1PH4, которые являются асинхронными электродвигателями с короткозамкнутым ротором с принудительным воздушным и водяным охлаждениями соответственно.
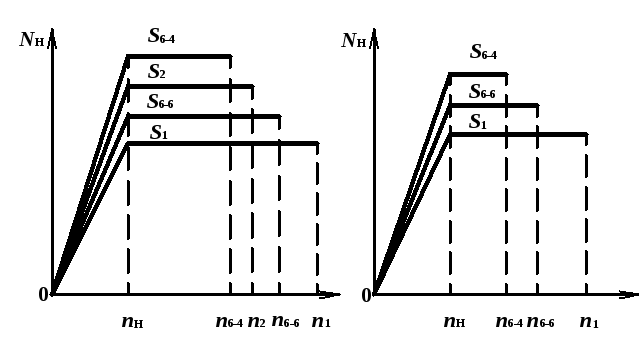
Типовые диаграммы мощности и числа оборотов рассматриваемых двигателей приведены на рис. 2.2, а их технические характеристики даны в табл. П7 и табл. П8, при условии, что обмотки статора включены по схеме «звезда». Диаграмма мощности характеризует перегрузочную способность двигателя при разных режимах его работы.
|
а) |
б) |
Рис. 2.2. Диаграммы мощности и числа оборотов при разных режимах работы двигателей:
а - серии 1PH7; б - серии 1PH4
На рисунках и в таблицах приложения приняты следующие обозначения:
NН- номинальная мощность электродвигателя;
nН- номинальная частота вращения ротора;
S1- продолжительный режим работы двигателя под постоянной нагрузкой;
S6-6- непрерывный режим работы с прерывающейся нагрузкой и относительной продолжительностью включения в 60% при максимальной продолжительности цикла в 10 мин;
S6-4- аналогично, но с относительной продолжительностью включения в 40%;
S2- режим работы с продолжительностью включения в 30 мин с последующей остановкой двигателя;
n1- максимальная частота вращения двигателя в режиме работыS1;
n6-6- максимальная частота вращения двигателя в режиме работыS6-6;
n2,n6-4- аналогично для режимов работыS2иS6-4;
N1,N2,N6-4,N6-6- значения мощности двигателя для режимов работыS1,S2,S6-4,S6-6соответственно.
Другой важной характеристикой двигателя является развиваемый им крутящий момент. Мощность Nи крутящий моментМсвязаны между собой математической зависимостью:
N =Mω,
где
![]() – угловая скорость, с-1;М– в
Нм;N– мощность, Вт.
– угловая скорость, с-1;М– в
Нм;N– мощность, Вт.
Если воспользоваться выражением ω= πn/30, получим формулуM= 9550N/n, в которой мощность принята в кВт.
Для выбранного в процессе проектирования привода с электродвигателем переменного тока определенной мощности целесообразно построить совместную диаграмму мощности и крутящего момента, которая потребуется для проектирования механического редуктора. На рис. 2.3 приведена такая диаграмма для электродвигателя модели 1PH7131-2NF, имеющего номинальную частоту вращения ротора 1500 мин-1. На этой частоте двигатель имеет номинальную мощностьNН = 11 кВт и номинальный моментMН= 70 Нм, которые может развивать двигатель в режимеS1. Верхние пунктирные линии показывают максимально возможные силовые характеристики электродвигателя в режимеS6-4. В интервале частот вращения ротора от 43 до 1500 мин-1 максимальный момент составляет 105 Н·м, а в интервале частот от 1500 до 4500 мин-1 мощность двигателя возрастает до 16,5 кВт.

Рис. 2.3. Диаграмма мощности и крутящего момента для двигателя 1PH7131-2NF