

Параметры трех вариантов коробок скоростей
|
№ валов |
Вариант 1 (рис. 4.2) |
Вариант 2 (рис. 4.3) |
Вариант 3 (рис. 4.5) | |||||||||
|
Σz |
М, Н∙м |
m, мм |
А, мм |
Σz |
М, Н∙м |
m, мм |
А, мм |
Σz |
М, Н∙м |
m, мм |
А, мм | |
|
I-II |
80 |
134 |
3 |
120 |
59 |
100 |
3 |
88,5 |
70 |
75 |
2,5 |
87,5 |
|
II-III |
54 |
306 |
4 |
108 |
72 |
192 |
4 |
144 |
66 |
190 |
4 |
139 |
|
III-IV |
64 |
403 |
4 |
128 |
95 |
362 |
4 |
190 |
95 |
359 |
4 |
190 |
|
IV-V |
88 |
860 |
4 |
178 |
95 |
869 |
4 |
190 |
95 |
858 |
4 |
190 |
|
ΣА |
534 |
612,5 |
599,5 | |||||||||
Пример 2.Требуется разработать кинематическую схему привода главного движения к токарному универсальному станку по следующим данным:nШП= 8…2000 мин-1– интервал частот вращения шпинделя;N= 11 кВт – мощность электродвигателя привода главного движения;MШП max= 1270 Нм – максимальный момент на шпинделе.
Решение задачи начнем с выбора знаменателя геометрического ряда φ и установления числа скоростей zв приводе станка. По табл. П2 устанавливаем число частот вращения z, задавшись знаменателем ряда φ. Известно, что в универсальных токарных станках чаще всего используются приводаcφ = 1,26 и φ = 1,41:
для φ = 1,26 геометрический ряд частот вращения шпинделя состоит из следующих чисел: n= 8; 10; 12,5; 16; 20; 25; 31,5; 40; 50; 63; 80; 100; 125; 160; 200; 250; 315; 400; 500; 630; 800; 1000; 1250; 1600; 2000. Откудаz= 25;
для φ = 1,41 – n = 8; 11,2; 16; 22,4; 31,5; 45; 63; 90; 125; 180; 250; 355; 500; 710; 1000; 1400; 2000, иz= 17.
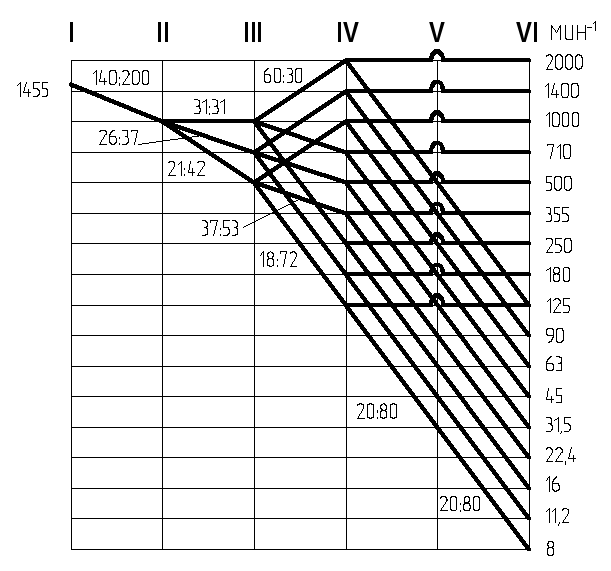
Числа скоростей z= 17 и 25 нельзя представить в виде произведения двойных и тройных блоков. Воспользуемся ближайшим большим числовым значениемz, примемz= 18 = 3·3·2 иz= 27 = 3·3·3. При этом графики частот вращения необходимо будет строить с совпадением частот, чтобы получить необходимые численные значенияz= 17 и 25. Причем в обоих случаях графики будут со сложенной структурой, поскольку характеристики у последних блоков с простой множительной структурой будут превышать допустимые значения. Структура приводов будет выглядеть следующим образом:
z= 18 = 3[1]·3[3]·(1 + 1),z= 27 = 3[1]·3[3]·(1 + 2[9]).
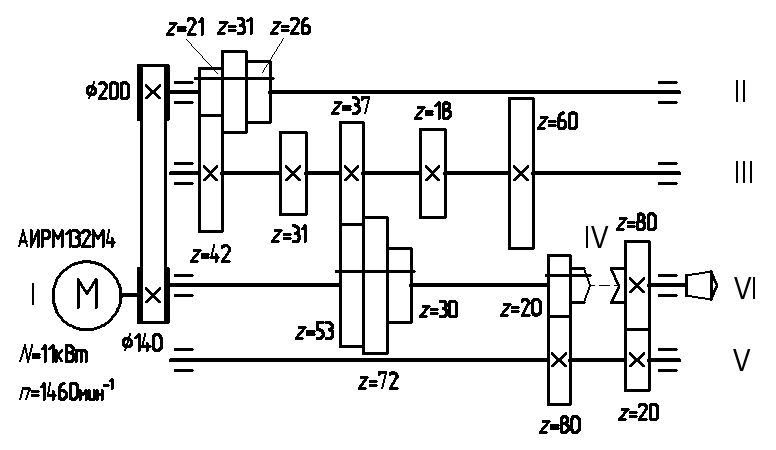
Графики частот вращения и кинематические схемы приводов с такими структурами представлены на рис. 4.6 и рис. 4.7, где источником движения является асинхронный электродвигатель типа АИРМ132М4 мощностьюN= 11 кВт с номинальной частотой вращенияn= 1455 мин-1.
а)
б)
Рис. 4.6. Привод главного движения на 17 скоростей:
а - график частот вращения; б - кинематическая схема

а)

б)
Рис. 4.7. Привод главного движения на 25 скоростей:
а - график частот вращения; б - кинематическая схема
Графические материалы на этих рисунках наглядно демонстрируют развитую механическую составляющую приводов с нерегулируемым асинхронным электродвигателем. Причем с уменьшением числового значения знаменателя ряда φ происходит усложнение механической части привода. Вместе с тем общеизвестно что, чем меньше числовые значения φ, тем проще обеспечить необходимые режимы резания на станке согласно технологическому процессу обработки детали. С этой точки зрения предпочтительнее использовать в приводах главного движения регулируемые электродвигатели.
|
|
|
|
а) |
б) |
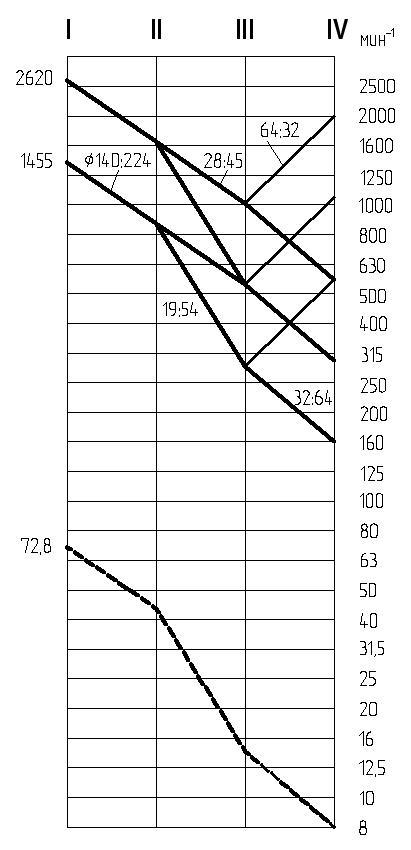

Рис. 4.8. Графики частот вращения привода с регулируемым электродвигателем АИРМ132М4:
а - с диапазоном регулирования шпинделя с постоянной мощностью, равным DN = 12,5;
б - с диапазоном DN = 6,3
Для рассматриваемого примера проанализируем конструкции коробок скоростей в зависимости от типа применяемого регулируемого электродвигателя. О сложности механического редуктора будем судить по графикам частот вращения. На рис. 4.8 – 4.10 представлены такие графики. Зоны регулирования шпинделя с постоянной мощностью у них разные и зависят, в основном, от интервала регулирования самого электродвигателя с постоянной мощностью при одинаковых вариантах структур механического редуктора. Наименьшей зоной регулирования обладает привод, в котором используется обычный асинхронный электродвигатель с частотным регулированием. Наибольшая зона принадлежит приводу, где источником движения служит высокомоментный электродвигатель постоянного тока. Однако наиболее перспективным приводом является привод с регулируемым электродвигателем переменного тока модели 1PH7107-2NFпо следующим соображениям:
во-первых, масса самого электродвигателя меньше массы электродвигателя постоянного тока в 2,5 раза, следовательно, и весь привод будет более легким;
во-вторых, диапазон регулирования привода можно расширить в область более высоких частот вращения, так как верхняя допустимая граница частот вращения двигателя может быть поднята с n= 5071 мин-1(по графику на рис. 4.10) доn= 6500 мин-1(по паспорту двигателя). Следовательно, открывается возможность применения более прогрессивного режущего инструмента;
в-третьих, регулируемый электродвигатель переменного тока позволяет иметь разную мощность при разных частотах вращения, что удобно в технологическом плане.
|
|
|
|
а) |
б) |


Рис. 4.9. Графики частот вращения привода с регулируемым электродвигателем 4ПФ160S:
а - с тремя зубчатыми колесами; б - с двумя зубчатыми колесами
В задании на проектирование привода оговорен максимальный момент на шпинделе, который должен быть не менее 1270 Нм. По графикам частот вращения можно выявить максимальные значения крутящих моментов. В приводах со ступенчатым регулированием частоты вращения шпинделя максимальный момент рассчитывается по условной частоте, определяемой по выражению:
![]() .
.
Принимаем nP= 40 мин-1.
Максимальный момент в приводе главного движения на 17 скоростей (рис. 4.6) составит Mmax= 1940 Нм на частоте вращения шпинделяnШП= 45 мин-1, в приводе на 25 скоростей –Mmax= 1980 Нм на частотеnШП= 40 мин-1.
|
|
|
|
а) |
б) |
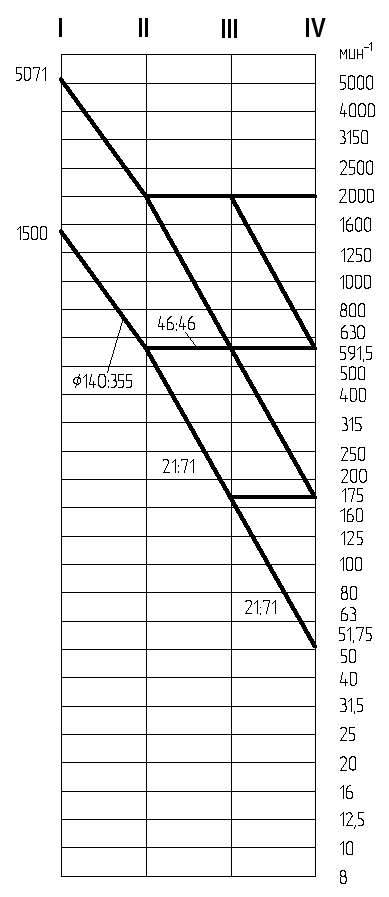

Рис. 4.10. Графики частот вращения привода с регулируемым электродвигателем 1PH7107-2NF со структурами: а - z = 2·2; б - z = 1 + 1·1
В приводах с регулируемыми электродвигателями максимальный момент на шпинделе рассчитывается по нижней кинематической цепочке при номинальной частоте вращения электродвигателя. Для приводов с графиками частот вращения на рис. 4.8 максимальные моменты имеют разные числовые значения. График частот вращения шпинделя по рис. 4.8, аобеспечивает максимальный моментMmax= 585 Нм на частоте вращения шпинделяnШП= 160 мин-1, а график на рис. 4.8,бимеетMmax= 268 Нм на частоте вращенияnШП= 315 мин-1.
Для двух вариантов приводов с графиками по рис. 4.9 максимальный момент на шпинделе одинаков и равен Mmax= 2390 Нм на частоте вращения nШП= 40 мин-1.
Графики частот вращения на рис. 4.10 также обеспечивают разные максимальные крутящие моменты на шпинделе. График по рис. 4.10, адаетMmax= 1920 Нм на частоте вращения шпинделя nШП= 54 мин-1, а привод с графиком по рис. 4.10,бимеетMmax= 572 Нм на частотеnШП= 175 мин-1.
Таким образом, те привода, которые дают максимальные крутящие моменты на шпинделе ниже поставленных условиями задачи из рассмотрения должны быть исключены.
Пример 3. Разработка конструкции привода главного движения по технической характеристике вертикального обрабатывающего центра, приведенной в проспекте на этот станок.
Исходными данными для решения этой технической задачи являются следующие данные, взятые из проспекта на станок:
nШП= 60…8000 мин-1- интервал частот вращения шпинделя;
NДВ= 5,5/7,5 кВт - мощность двигателя привода главного движения:
номинальная / максимальная - 30 мин, кВт;
XYOZCV- структурная формула компоновки станка с шириной стола 320 мм;
область применения: обработка корпусных деталей, деталей штампов и пресс-форм и других подобных деталей массой не более 150 кг в условиях мелкосерийного производства.
Задача решается в следующей последовательности: