

2.2.2. Разработка кинематики привода с бесступенчатым регулированием частоты вращения шпинделя
Современная тенденция развития приводов главного движения станков и в особенности многоцелевых станков с ЧПУ связана с сокращением числа промежуточных механических элементов между шпинделем и электродвигателем. Однако прямое соединение выходного вала регулируемого электродвигателя со шпинделем в большинстве случаев практически невозможно из-за резкого уменьшения диапазона регулирования частоты вращения шпинделя с постоянной мощностью, а, следовательно, и существенного снижения области применения станка. Кроме этого, механический редуктор даже в упрощенном варианте (одна или две зубчатые передачи) сглаживает неравномерность вращения ротора двигателя на низких частотах его вращения. Поэтому для современных электродвигателей, применяемых в приводах главного движения станков, нужны механические редукторы.
В приводах с бесступенчатым регулированием частоты вращения шпинделя используется комбинированная система управления, состоящая из зоны регулирования электродвигателя с постоянной мощностью DДВи зоны регулирования коробки скоростейDK, а общий диапазон приводаDравен произведению этих диапазонов, т.е.D = DДВDК.
Диапазон регулирования электродвигателя с постоянной мощностью рассчитывается по выражению:
DДВ=nmax.ДВ/nН.ДВ,
где nН.ДВиnmax.ДВ– номинальная и максимальная частоты вращения соответствующего типа электродвигателя. Для асинхронных регулируемых электродвигателей значения этих частот принимаются для режимаS1.
Определение числового значения мощности регулируемых электродвигателей предлагается производить общеизвестным способом – по наибольшей мощности резания из возможных выполняемых технологических операций или переходов на станке, умноженной на коэффициент 1,25. И по этой рассчитанной мощности следует выбирать из каталога тип электродвигателя, за исключением специальных асинхронных электродвигателей серии 1РН7 и 1РН4, для которых тип двигателя рекомендуется определять по мощности двигателя в режиме его работыS6-4, поскольку двигатели имеют разную мощность при различных режимах работы.
Число ступеней коробки скоростей рассчитывается по формуле:
z=lgD/lgDДВ.
Если число zполучается дробным, то его следует округлить до ближайшего целого. При округлении в меньшую сторону, нижняя часть заданного диапазона регулирования шпинделя будет осуществляться с постоянным моментом. При округлении в большую сторону регулирование частоты вращения шпинделя во всем диапазоне производится при постоянной мощности. Однако охватить весь диапазон регулирования шпинделя с постоянной мощностью в современных станках, особенно в многоцелевых станках с ЧПУ, становится все сложнее, поскольку он достигает чисел 200…250 и более. Это обстоятельство связано с достижениями в области инструментальных материалов. Использование режущего инструмента из твердого сплава с износостойкими покрытиями, керамики, кубического нитрида бора и др. на порядок (в 10 и более раз) поднимает скорости резания. Следовательно, нужны приводы с высокими частотами вращения шпинделя. В то же время ряд таких технологических операций, как резьбонарезание, развертывание, зенкерование и др. требуют низких частот вращения шпинделя, поэтому приходится применять двухзонное регулирование. В областях высоких частот вращения регулирование шпинделя производится с постоянной мощностью, а в области низких частот – с постоянным моментом, чтобы не усложнять механическую часть привода. Кроме того, следует отметить, что для выполнения указанных технологических операций полной мощности от привода не требуется.
|
|
|
| |
|
а)
|
б)
|
в)
| |
|
|
|
| |
|
г)
|
д)
|
е)
| |
|
|
| ||
|
ж)
|
з)
| ||
|
|
| ||
|
и) |
к) | ||
|
Рис. 2.12. Разновидности кинематических схем коробок скоростей для регулируемых приводов главного движения | |||
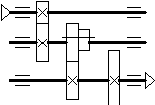
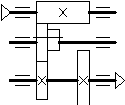





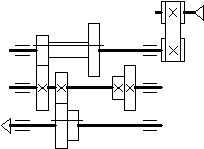
С учетом изложенного практичнее
конструировать коробки скоростей на
2, 3 или 4 ступени со знаменателем ряда φ
= 1,26. Причем целесообразно отказаться
от использования тройных блоков зубчатых
колес, а применять только двойные блоки.
Если z = 4, то редуктор
будет с двумя двойными блоками. Приz
= 3 редуктор лучше проектировать со
сложенной структурой, то естьz
= 2 + 1. Типовые разновидности кинематических
схем коробок скоростей приведены на
рис. 2.12 с прямозубыми и косозубыми
колесами. Сложенную структуру имеют
схемы (рис. 2.12,с, ж, з). Принцип
переключения зубчатых колес понятен
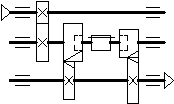
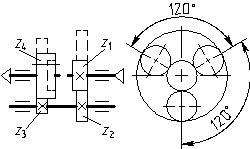
из рисунков схем. Пояснения требует
лишь кинематическая схема на рис. 2.12,ис тремя потоками передачи движения.
Передача крутящего момента через три
ветви параллельно работающих зубчатых
колес уменьшает нагрузки на зубья в три
раза и разгружает опоры центрального
колеса от радиальных сил, что, в конечном
итоге, обеспечивает компактность
редуктора. Данная схема обеспечивает
движение по двум кинематическим цепям.
Первая кинематическая цепь соединяет
выходной вал с валом электродвигателя
напрямую (передаточное отношениеi
= 1) при смещении колесаz4вправо до зацепления с колесомz1.
Вторая цепь обеспечивает вращение
выходного вала с передаточным отношением
![]() при крайнем левом положении колесаz4.
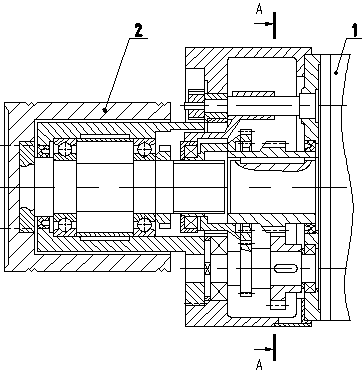
Конструктивное решение такой кинематической
схемы дано на рис. 2.13. Двухступенчатая
коробка скоростей присоединяется
непосредственно к электродвигателю1,
а выходной вал редуктора соединен со
шкивом ременной передачи2.
при крайнем левом положении колесаz4.
Конструктивное решение такой кинематической
схемы дано на рис. 2.13. Двухступенчатая
коробка скоростей присоединяется
непосредственно к электродвигателю1,
а выходной вал редуктора соединен со
шкивом ременной передачи2.
В коробках скоростей с косозубыми колесами предпочтительнее использовать кулачковые или зубчатые муфты для переключения зубчатых колес, особенно при высоких частотах вращения. При средних и низких частотах вращения допустимо использование электромагнитных муфт.
Применение ременных передач благоприятно сказывается на динамических характеристиках привода, поскольку они хорошо гасят вынужденные колебания и имеют более высокие, чем зубчатые колеса, допустимые окружные скорости. Рекомендуется принимать передаточные отношения ременной передачи в пределах i= 0,4…1 и использовать её непосредственно для вращения шпинделя, если частота вращения последнего более 3500 мин-1.
Характерной особенностью всех кинематических схем, приведенных на рис. 2.12, является то обстоятельство, что в них рекомендуется использовать зубчатые колеса с передаточными отношениями, лежащими в пределах 1/4 ≤ i≤ 1, для избегания падения передаваемого крутящего момента на высоких частотах вращения шпинделя, т.е. в схемах должны отсутствовать повышающие передачи. Такое ограничение передаточных отношений у зубчатых колес приводит к сужению общего диапазона регулирования привода главного движения с постоянной мощностью. Обеспечить необходимый крутящий момент на высоких частотах вращения шпинделя с сохранением широкого диапазона регулирования с постоянной мощностью можно двумя способами: использовать другой электродвигатель с более широким диапазоном регулирования с постоянной мощностью или увеличить числа зубчатых колес и валов, участвующих в передаче крутящего момента.
Подбор конкретных численных значений зубьев колес в коробке скоростей производится на основании графика частот вращения, построение которого ведется в основном по тем же правилам, что и для приводов со ступенчатым регулированием, но с некоторыми особенностями.
На первом валу графика частот вращения шпинделя откладываются две точки, соответствующие номинальной и максимальной частотам вращения электродвигателя, число горизонтальных интервалов между которыми характеризует диапазон регулирования двигателя с N =const. Чем больше это число, тем проще будет коробка скоростей.
Для построения графика частот вращения шпинделя станка следует выполнять условие, при котором диапазоны регулирования зубчатых колес должны увеличиваться в направлении от электродвигателя к шпинделю (рис. 2.14, а) или чтобы эти диапазоны были одинаковыми (рис. 2.14,б).
|
|
|
|
Рис. 2.13. Двухступенчатая коробка скоростей с тремя параллельно работающими колесами | |
|
|
|
|
а) |
б) |
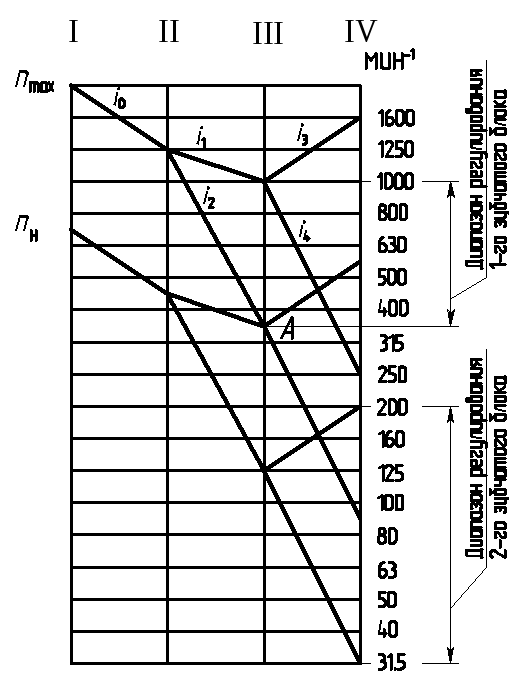

Рис. 2.14. График частот вращения привода с двумя зубчатыми блоками:
а - с разными диапазонами регулирования зубчатых колес;
б - с одинаковыми диапазонами регулирования зубчатых колес
Максимально допустимый диапазон регулирования для зубчатых блоков, состоящих из двух или трех колес, составляет девять интервалов на графике частот вращения. Построение графика рекомендуется начать ломаной линией (кинематической цепи), соединяющей максимальные частоты вращения шпинделя и электродвигателя. Чем больше прогиб рассматриваемой линии на промежуточных валах (данные валы вращаются на меньших частотах, чем крайние валы), тем на меньших частотах вращения шпинделя начинается зона регулирования привода с постоянной мощностью. При этом одновременно уменьшается крутящий момент на шпинделе на максимальной частоте его вращения.
По этой причине рекомендуется использовать при построении графиков не все девять интервалов зоны регулирования зубчатых колес, а только шесть интервалов, которые обеспечивают применение понижающих зубчатых передач в коробке скоростей.
Для обеспечения постоянного числового значения мощности на шпинделе станка в общем диапазоне регулирования привода график частот вращения строят так, чтобы зубчатые колеса первого блока, образующие две кинематические цепочки, имели на графике частот вращения одну общую точку на ведомом валу на номинальной и максимальной частотах двигателя. На рис. 2.14, аэто точкаА, в которой частоты вращения на валу III являются одинаковыми для двух кинематических цепей, то естьnA=nmaxi0i2=nНi0i1. При подборе численных значений зубьев на колесах по передаточным отношениямi, расхождение частот в точкеАпо двум кинематическим цепям не должно превышать ± 2,5 процента. На графике частот по рис. 2.14,бэто условие исполнено, в чем легко убедиться, выполнив числовые расчеты.
Такой характер графиков свойственен приводам с электродвигателями, у которых диапазон регулирования с постоянной мощностью не превышает число 8. Для приводов с более широким (более 8) диапазоном регулирования график частот вращения шпинделя представлен на рис. 2.15, а.
|
|
|
|
а) |
б) |
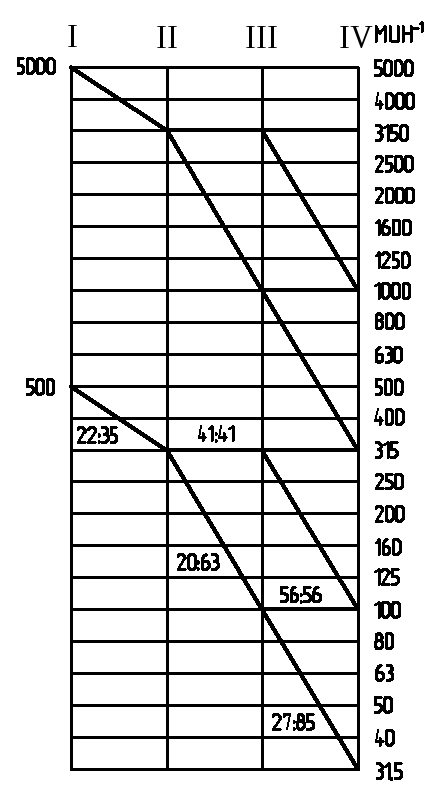

Рис. 2.15. Графики частот вращения привода с разной структурой:
а - z = 2·2; б - z = 1 + 2
Данный график можно усовершенствовать, изменив структуру привода с простой множительной z= 2·2 на сложенную структуруz= 1 + 2 (рис. 2.15,б). В результате имеем более простую конструкцию коробки скоростей, у которой меньше валов и зубчатых колес. Однако в этом случае требуется согласование размеров межосевых расстояний между валами, на которых размещаются зубчатые колеса, со стандартной длиной ремня. Для этого воспользуемся формулой расчетной длины ремня [18]:
Lр= 2a+π(D1+D2)/2 + (D2–D1)2/(4a),
где Lр– расчетная длина ремня, мм;а– межосевое расстояние между шкивами ременной передачи, мм (равно сумме расстояний между валов зубчатых передач при расположении всех осей на одной линии);D1иD2– расчетные диаметры ведущего и ведомого шкивов, мм.
Длина ремня Lрокругляется до ближайшего стандартного значения с последующим уточнением межосевого расстояния:
![]() .
.
Межосевое расстояние аобеспечивается за счет изменения расположения осей промежуточных валов в пространстве или смены модуля и числа зубьев в зубчатых колесах.
Пример.Для трехваловой коробки скоростей (рис. 2.16,а) требуется увеличить параметра. Выполнить это условие можно за счет увеличения модуля в зубчатых колесах или увеличения числа зубьев без изменения передаточных отношений в зубчатых передачах. Если потребуется уменьшить параметрa, то смещение оси валаIIв горизонтальной плоскости позволит решить поставленную задачу (рис. 2.16,б) при сохранении принятых межосевых расстоянийА1иА2между валами.
|
|
|
|
а) |
б) |

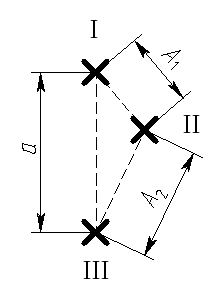
Рис. 2.16. Варианты расположения валов в редукторе:
а - по одной линии; б - по ломаной линии
Для коробок скоростей, имеющих график частот вращения, подобный приведенному на рис. 2.17, а, рекомендуется использовать следующий конструкторский прием. Основной недостаток исходного графика заключается в том, что на шпинделе располагается три зубчатых колеса. Для устранения этого недостатка поменяем местами зубчатые колеса между валами II и III на зубчатый блок между валами III и IV. Измененный график приведен на рис. 2.17,б. Правомерность такого приема можно объяснить математически. Известно, что произведение не изменится от перемены мест множителей. Аналогия такая возможна, поскольку уравнение кинематического баланса, связывающего частоты вращения электродвигателя и шпинделя, представляет собой произведение передаточных отношений зубчатых колес, причем допустимо увеличить сумму зубьев между валами III и IV, но с тем же передаточным отношением между колесами. Например, пару колес 24/61 можно заменить на 29/74, так как крутящий момент на валу IV больше, чем на III, и нагрузка на зубьях в последней передаче может оказаться больше допустимых значений. Необходимость в изменении числа зубьев выяснится при дальнейших прочностных расчетах.
Приведенные графики на рис. 2.17 имеют один существенный недостаток – пониженный крутящий момент на высоких частотах вращения шпинделя из-за наличия в кинематической цепи повышающих зубчатых передач. Вариант графика частот вращения шпинделя коробки скоростей со сложенной структурой, приведенный на рис. 2.18, а, не имеет отмеченного недостатка. Кинематическая схема данного редуктора дана на рис. 2.18,б, в которой использованы только зубчатые колеса. Интервал частот вращения шпинделя от 400 до 1600 мин-1 обеспечивает подвижное вдоль оси колесоz= 18 с зубчатой муфтой, соединяя напрямую валы II и IV. Включение в работу зубчатых колес на валу III дает остальной более низкий интервал частот вращения шпинделя. Верхний предел частот вращения шпинделя в данной схеме может быть поднят до 2150 мин-1за счет того, что в данной кинематической схеме ещё не задействован верхний допустимый предел частот вращения электродвигателя в 4000 мин-1.
|
|
|
|
а) |
б) |
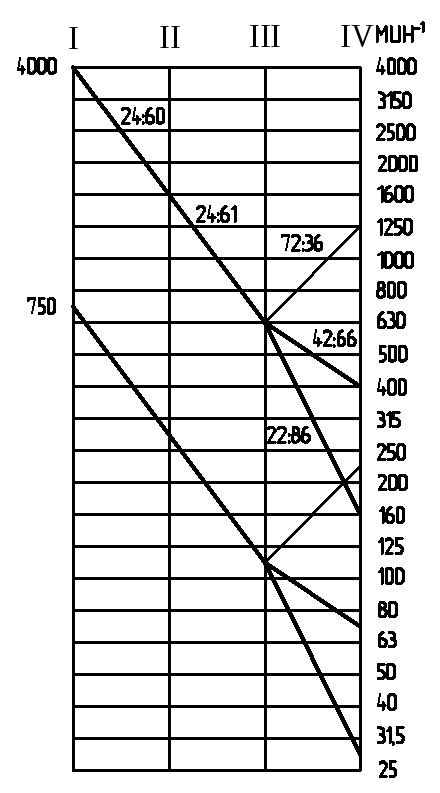

Рис. 2.17. График частот вращения:
а - с тремя колесами на шпинделе; б - с одним колесом на шпинделе
Конструкция шпиндельной бабки со сложенным приводом показана на рис. 2.19, в которой верхний предел частот вращения обеспечивается ременной передачей с натяжным роликом. Ременная передача вращает шпиндель 1при включении зубчатой муфты2, блок шестерен3при этом выводится из зацепления с зубчатыми колесами на шпинделе. Ременные передачи применяются в приводах главного движения, если частоты вращения шпинделя более 3500 мин-1.
Рассмотренные графики частот вращения и кинематические схемы приводов главного движения предназначены для станков с верхним пределом вращения шпинделя до 3000…4000 мин-1и нижней границей вращения около 25…30 мин-1. Во всем этом интервале частот шпиндель вращается с постоянной мощностью, что является достоинством такого привода.
|
|
|
|
а) |
б) |

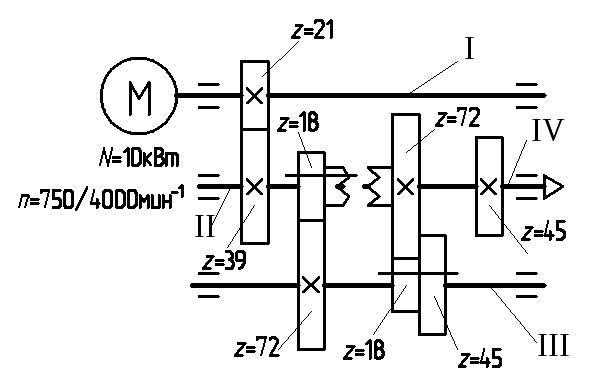
Рис. 2.18. Коробка скоростей со сложенной структурой z = 1 + 2:
а - график частот вращения; б - кинематическая схема
Конструктивная сложность коробки скоростей зависит от диапазона регулирования электродвигателя с постоянной мощностью и номинальной частоты его вращения. Для приводов с такими выходными параметрами лучше всего использовать высокомоментные электродвигатели постоянного тока, в частности, серии 4ПФ. Наиболее предпочтительной областью применения таких приводов являются крупногабаритные станки, например, такие, как токарно-карусельные, тяжелые расточные и другие подобные станки.
Появление новых современных инструментальных материалов, как отмечалось раньше, потребовало от приводов более высоких частот вращения шпинделя для станков малых и средних размеров. Удовлетворить возросшие требования к приводам высокомоментные двигатели не в состоянии из-за низких (не более 6000 мин-1) максимальных частот вращения самих двигателей и конструктивных особенностей шпиндельных узлов.
Вместе с тем, существует техническая возможность поднять верхний предел частот вращения шпинделя до 8000…10000 мин-1рассмотренных механических редукторов, если в приводах предусмотреть следующие конструктивные изменения:
1. В качестве электродвигателей использовать асинхронные регулируемые двигатели серии 1РН7 и 1РН4 фирмы «Siemens» или аналогичные двигатели фирмы «Fanuc», имеющие в два и более раз больший верхний предел частот вращения двигателя по сравнению с двигателями постоянного тока. При этом выбирать следует те марки двигателей, которые имеют номинальную частоту вращения не более 1500 мин-1.
|
|
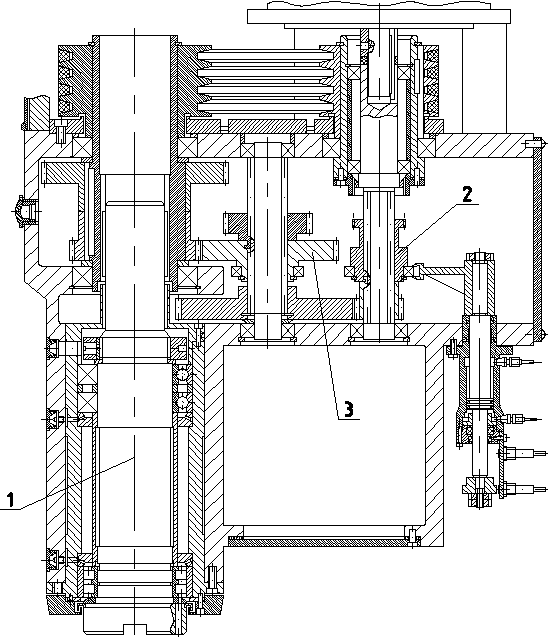
Рис. 2.19. Развертка валов шпиндельной бабки со сложенной структурой
2. В шпиндельных узлах использовать радиально-упорные прецизионные гибридные подшипники из нитрида кремния (Si3N4) фирмы «SKF» (Швеция). Подшипники с керамическими шариками имеют меньший коэффициент трения, лучше работают при недостаточном количестве смазочного материала и вследствие этого имеют большую (до 4 раз) долговечность и более высокую предельную частоту вращения (до 2,5 раз). Технические характеристики таких подшипников приведены в табл. П23 (см. прил. 6). Керамические подшипники допустимо использовать и на быстроходных валах механических редукторов.
3. Изготавливать зубчатые колеса по четвертой степени точности, которые обеспечивают максимально допустимые окружные скорости. При этом необходимо проверить тщательную балансировку валов коробки скоростей, начиная с этапа конструкторской проработки размещения и соединения с валами вращающихся деталей механического редуктора.
Повысить частоты вращения зубчатых колес выше допустимых норм на сегодняшний день технически не возможно. Поэтому выход только один – отказаться от механического редуктора и перейти на применение мотор-шпинделя, что в мировой практике станкостроения и делается.
Однако при этом следует иметь в виду, что переход на мотор-шпинделя, которые создаются на базе регулируемых асинхронных и синхронных электродвигателей, резко снижает зону регулирования шпинделя с постоянной мощностью. Да и для создания необходимого крутящего момента на шпинделе придется применять двигатели большей мощности.