

При наличии автосчислителя (АПИ РНС, НАК) счислимые точки переносятся на путевую МНК с
указанной капитаном дискретностью и обозначаются условным знаком ( ).
).
Определения места судна нужны для контроля за движением судна по заданному маршруту с требуемой точностью.
В соответствии с требованиями ИМО, предельная радиальная (Р = 0,95) погрешность текущего места судна не должна превышать 4,0 мили. Этим требованиям удовлетворяют спутниковые РНС и наземные РНС типа «Декка», «Лоран-С», «Чайка», «Марс-75».
Определения места судна по РНС должны выполняться через равные промежутки времени ( t) в пределах допустимой дискретности (периодичности) обсерваций (см. табл. 24.2), с последующим анализом серии обсерваций по определению фактических элементов движения судна.
При наличии РНС, астрономические обсервации становятся резервным способом, при этом для ускорения и повышения надежности вычислений необходимо использовать программируемый микрокалькулятор (ПМК).
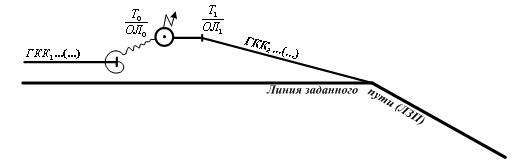
Рис. 33.1. Выход на ЛЗП
Если под действием неучтенных гидрометеорологических факторов, из-за погрешностей счисления или по какой-то иной причине судно значительно уклонилось от линии заданного пути (ЛЗП), то возвращение на прежнюю ЛЗП лишь удлинит переход. Вместо этого из текущего места судна (на Т1 рис. 33.1) рассчитывают новый (ГКК2) кратчайший (или наивыгоднейший) путь на заданную конечную точку (точку поворота).
33.2.Судовождение в высоких широтах
33.2.1.Навигационные условия плавания
Крайону высоких широт относятся Северный Ледовитый океан и прилегающие к нему моря
Арктического |
бассейна, |
расположенные |
севернее |
параллели |
70°. |
Навигационные условия плавания: |
|
|
|
|
|
1.Точность работы гироскопических компасов ухудшается. В широтах более 87° гирокомпас перестает быть курсоуказателем. Ненадежными курсоуказателями становятся гироазимуты, ориентированные относительно географического меридиана. Для курсоуказания и счисления пути в приполюсных районах применяются гироазимуты и инерциальные системы, ориентированные в системе квазигеографических координат, навигационные ЭВМ и автопрокладчики, решающие задачу счисления в той же системе координат. Точность работы магнитных компасов ухудшается.
2.Применение карт в проекции Меркатора затруднительно, а в широтах, превышающих 85°, невозможно. Для осуществления графической прокладки используются карты равноугольной поперечной цилиндрической проекции Меркатора, а для отдельных расчетов – карты в гномонической проекции.
3.При прокладке линий пеленгов введение (учет) ортодромических поправок необходимо даже при малых расстояниях между судном и пеленгуемым объектом.
4.Недостаточная изученность рельефа дна, течений, ледовых образований, магнитного склонения. Многолетний паковый лед может достигать толщины 20 м, а айсберги могут иметь осадку до 100 м. Ледяной покров и айсберги находятся в постоянном движении под воздействием ветров и течений.
5.Частые туманы, многоярусная облачность и снежные заряды затрудняют наблюдение ледовой и надводной обстановки, а значит, видимого горизонта, что значительно ограничивает возможности определения места судна по небесным светилам.
6.Недостаточное оборудование береговыми СНО. Наличие полярных сияний и магнитных бурь вносит помехи в работу радионавигационных систем и магнитных курсоуказателей.
33.2.2. Счисление координат судна
Счисление координат судна осуществляется в квазигеографической системе координат. В этой же системе ведется и автоматическое счисление с помощью навигационных ЭВМ и автопрокладчиков, имеющих устройство преобразования координат.
Графическое счисление, как автоматичеаское, так и выполняемое вручную осуществляется на МНК поперечной равноугольной цилиндрической проекции Меркатора. Сущность счисления координат судна на МНК в данной проекции при курсоуказании в квазигеографической системе координат в принципе такая же, как и на картах прямой проекции Меркатора при курсоуказании в географической системе координат.
Определение на карте в поперечной проекции Меркатора линии пути, соответствующей заданному истинному (географическому) курсу. При постоянстве географического курса судно следует по локсодромии, которая на карте поперечной меркаторской проекции – кривая линия. При разности географических долгот Δλ=1÷2° без ущерба точности вместо кривой на МНК прокладывают ее хорды или отрезки квазилоксодромии (рис. 33.2).
Рис. 33.2. Определение на МНК линии пути
Направление каждой хорды в квазигеографической системе координат (квазикурс – Kq) рассчитывают по формуле:
(33.6)
где ИК – истинный курс (град.);
Q – угол перехода в данной точке (при λE-+Q, при λW--Q);
λCP – географическая долгота средней точки хорды (с МНК).
Пройденное судном расстояние откладывают (снимают) по квазилоксодромии.
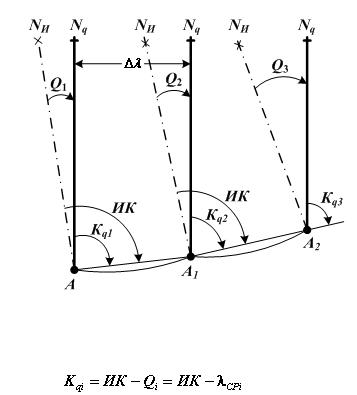
Расчет географического курса для удержания судна на заданной квазилоксодромии, проложенной на МНК. Учитывая, что квазилоксодромия пересекает географические меридианы под различными углами ИКi, для плавания по этой линии необходимо изменять истинный курс судна. При разности географических долготΔλ=2° практически географический курс ИКi изменяют дискретно, т.е. рассчитывают его для участков квазилоксодромии АА1, А1А2 и т.д. (рис. 33.3).

Рис. 33.3. Расчет географического курса
Истинный курс для каждого участка рассчитывают по формуле:
(33.7)
где Kq – квазикурс (град.).
Компасный курс каждого участка рассчитывают по формуле:
(33.8)
где K – поправка курсоуказателя (град.).
Компасные курсы задаются рулевому на моменты времени, соответствующие началу плавания по каждому участку квазилоксодромии.
Особенности счисления координат судна при использовании гироазимутов и инерционных навигационных систем, ориентированных в квазигеографической системе координат. Сущность счисления такая же , как и в предыдущих случаях. Показания курсоуказателей исправляют их поправками, известными на момент учета или прокладки истинных курсов или квазикурсов на МНК.
33.2.3. Особенности определения места судна
Координаты места судна могут определяться с помощью ГНСС «DPS» (США), «ГЛОНАСС» (РФ) и, в перспективе «ГАЛИЛЕО» (ЕС); РНС дальнего действия и астронавигационных средств по небесным светилам. Изолинии и линии положения можно прокладывать как в географической, так и в квазигеографической системе координат. В широтах до 80° уравнения линий положения решаются в географической системе координат; в широтах÷85° 80 – как в географической, так и в квазигеографической системе с переходом от одной системы к другой по формулам:
(33.9)
В широтах более 85° уравнения линий положения, кроме вычисления элементов ВЛП небесных светил, решаются в квазигеографической системе координат.
Графическая прокладка элементов линии положения в квазигеографической системе координат аналогична прокладке в географической системе. Отличие состоит в прокладке квазинаправления линии положения (рис. 33.4). Направление градиента (переноса) линии положения рассчитывают по формуле:
(33.10)
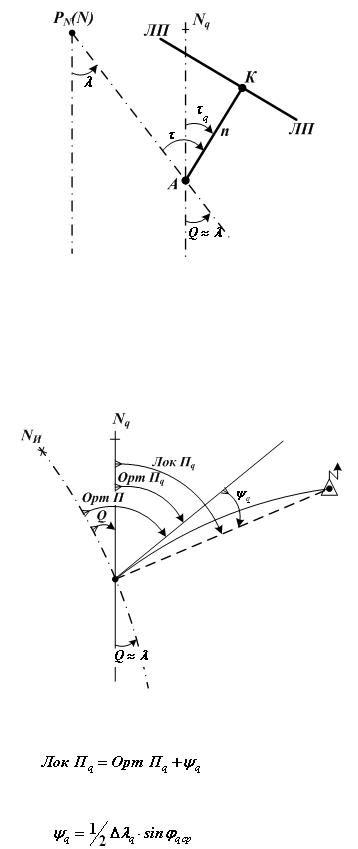
Рис. 33.4. Прокладка квазинаправления линии положения
Перенос линии положения рассчитывают по тем же формулам, что и в географической системе координат. При прокладке его на карте в поперечной проекции Меркатора необходимо учитывать отличие 1' дуги меридиана от стандартной мили.
Графическая прокладка направлений квазилоксодромических пеленгов имеет некоторые особенности (рис. 33.5).
Рис. 33.5. Прокладка квазилоксодромического пеленга
Направление квазилоксодромического пеленга рассчитывают по формуле:
(33.11)
где OpmПq=OpmП - Q;
Ψq – квазиортодромическая поправка
(33.12)
Вквазисеверном полушарии Ψq (+), если OpmПq< 180°, и отрицательна, если OpmПq>180°.
Вприполюснх районах φq≈0, поэтому и Ψq близка к нулю. Отсюда в приполюсных районах ортодромия на карте в поперечной проекции Меркатора практически совпадает с квазилоксодромией.
Особенности астронавигационных обсерваций. Наблюдения светил ограничиваются естественной освещенностью и плохой видимостью горизонта. Высоты светил лучше измерять секстанами с искусственным горизонтом.
При 70° < |
φ < 8 0 прокладку° |
ВЛП ведут |
на плане от счислимого места в М 1 см =1 |
' и |
прямоугольной |
системе координат (ось Х – |
по географическому меридиану, ось Y – по |
ДБК, |
|
перпендикулярной меридиану. Прямоугольные координаты места М (х, у) неравны РШ и ОТШ, поэтому φ0λ0 вычисляют по формулам: