

Например: Измерен вертикальный угол β между видимым горизонтом и вершиной ориентира:
ОСβ = 0°17,0′, i + S = –2,0′, е = 8,0 м, h = 108 м.
Определить расстояние DУ до ориентира.
Решение:
1. |
из таблицы 11а «МТ-75» на с. 220 или из табл. 3.21 «МТ-2000» на с. 354 по е = 8,0 м выбираем |
|
|
поправку угла за наклонение видимого горизонта |
βd = hd = – 5,0′ (табл. 14.1); |
2. |
исправляем измеренный угол: β = ОСβ + (i + S) + |
βd = 0°17,0′– 2,0′– 5,0′ = 0°10,0′; |
3.рассчитываем разность высот (h – e) = 108 м – 8 м = 100 м;
4.из табл. 29 «МТ-75» или табл. 2.7 «МТ-2000» по (h – e) = 100м и β = 0°10,0′ выбираем DУ = 12,2 мили (табл. 14.2).
14.1.4. Измерение расстояний до навигационных ориентиров с помощью технических средств
Навигационные РЛС (НРЛС) являются дальномерно-азимутальными радионавигационными средствами («Нептун», «Створ», «Дон», «Донец», «Океан» и др.). Дальность действия НРЛС зависит от отражающей площади ориентира, условий распространения радиоволн, мощности и длительности излучаемого радиоимпульса и др. (25÷50 миль max).
Практика судовождения показывает, что для измерения расстояний до ориентиров чаще всего используют именно НРЛС, а в условиях плохой видимости – только НРЛС.
14.2.Определение места судна по расстояниям до навигационных ориентиров
14.2.1.Определение места судна по двум расстояниям до ориентиров, полученных по их
вертикальным углам
1.Подготовить навигационный секстан к наблюдениям: выполнить его выверки и определить поправку индекса (i).
2.Подобрать для определения места два ориентира (видимы визуально, нанесены на карту, разнесены по горизонту на угол > 30° < 150°).
3.Навигационным секстаном измерить вертикальные углы этих ориентиров (первым измерять угол того ориентира, который ближе к траверзу). На момент измерения угла второго ориентира
заметить время (Т) и отсчет лага (ОЛ). [С навигационного секстана: ОС1 (ОС2) – отсчет секстана при измерении угла первого (второго) ориентира].
4.Рассчитать истинные значения вертикальных углов ориентиров
β1′ = ОС1 + (i + S) + βd′; β2′ = ОС2 + (i + S) + βd′
где S – инструментальная поправка секстана (из формуляра по ОС1(2));
βd′ – поправка за наклонение видимого горизонта. Так как земная рефракция для основания
и вершины предмета будет примерно одинаковой, поэтому ее можно не учитывать при DУ < De.
5.Из Лоции или книги «Огни и знаки…» («Огни») выбрать значения высот ориентиров (h1 = 27 м, h2 = 23 м).
6.По табл. 29 «МТ-75» (с. 289÷293) или табл. 2.7 «МТ-2000» (с. 261÷265) по значениям (h1 – e, h2 – e метры) и (β1′, β2′) получить значения расстояний до ориентиров (DУ1, DУ2). Если DУ < De то, по упрощенной формуле:
Рис. 14.5. Определение места судна по расстояниям до двух ориентиров
(14.6), или  (14.5)
(14.5)
рассчитать расстояния до первого и второго ориентиров (DУ1, DУ2).
7.На карте из места 1-го ориентира А провести окружность (ее дугу) радиусом DУ1, а из места 2-го ориентира Б – дугу окружности радиусом DУ2 (рис. 14.5).
8.Точку пересечения двух окружностей (их дуг) обозначить условным знаком ( ) – обсервованное место и рядом с ним подписать время и отсчет лага
) – обсервованное место и рядом с ним подписать время и отсчет лага  .
.
9.На момент измерения углов (Т) найти счислимую точку, обозначить невязку, снять ее направление и величину (С = 110° – 1,9 мили).
10.Оформить запись в судовом журнале.
09 |
10 ОЛ = 49,1 МК «А» ОС = 0°03,2′; h = 23 м МК «Б» ОС = 0°05,2′ |
–– h = 27 м, i + S = +0,8′, e = 5 м, С = 110° – 1,9 мили
Рассмотренный способ определения места довольно трудоемкий и на практике применяется очень редко.
14.2.2. Определение места судна по расстояниям до трех ориентиров, измеренных с помощью навигационной РЛС
Этот способ является наиболее удобным и точным.
Измеренному расстоянию до какого-либо ориентира соответствует навигационная изолиния – окружность с центром в точке ориентира, до которого измерялось расстояние и радиусом, равным истинному значению этого расстояния.
Для получения обсервованного места достаточно одновременно (почти одновременно) измерить расстояния до трех ориентиров. Точка пересечения навигационных изолиний – окружностей (их дуг) радиусами D1, D2 и D3 – даст нам обсервованное место судна.
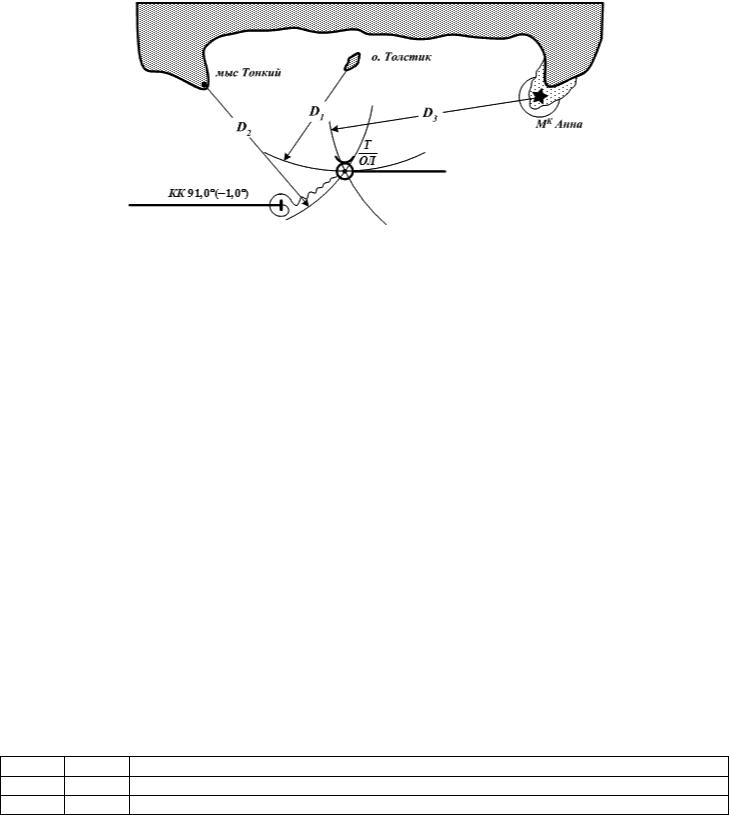
Рис. 14.6. Определение места судна по расстояниям до трех ориентиров
Выполнение способа (рис. 14.6):
1.Включить навигационную РЛС, подобрать по путевой навигационной карте три навигационных ориентира разнесенных по горизонту.
2.В быстрой последовательности, с помощью навигационной РЛС, измерить расстояния до этих ориентиров, заметить время (Т) и отсчет лага (ОЛ).
Примечание:
Первыми измеряются расстояния до ориентиров, находящихся ближе к траверзу.
3.Рассчитать истинные значения расстояний до ориентиров, то есть измеренные навигационной РЛС расстояния исправить ее поправкой
D1(2,3) = DP1(2,3) + DP |
(14.9) |
4.На путевой навигационной карте провести окружности (их дуги) с центрами в местах ориентиров, до которых измерялись расстояния и радиусами, равными исправленным значениям измеренных расстояний – R1(2,3) = D1(2,3).
5.Точка пересечения всех трех окружностей (их дуг) и даст нам искомое обсервованное место
судна. Обозначить его условным знаком ( ) и подписать рядом с ним время (Т) и отсчет лага
) и подписать рядом с ним время (Т) и отсчет лага
(ОЛ).
6.На момент измерения расстояний до ориентиров (Т) нанести на карту счислимое место, обозначить невязку, снять ее направление и величину (С = 58° – 1,7 мили).
7.Оформить запись в судовом журнале.
20 |
13 |
ОЛ = 84,8 о. Толстик DР = 24 кб., мыс Тонкий DР = 39 кб., МК Анна |
–– DР = 50 кб. DР = 0, С = 58° – 1,7 мили
Измерение расстояний до трех ориентиров для определения места, при условии пересечения всех трех окружностей (их дуг) в одной точке однозначно указывает обсервованное место.
Если окружности (их дуги) не пересекаются в одной точке и образуют фигуру погрешностей со стороной > 5 мм, это свидетельствует о промахах или в опознании ориентиров или в измерении расстояний до них. При большой фигуре погрешности – повторить измерения.

14.2.3. Определение места судна по расстояниям до двух ориентиров
Рис. 14.7. Определение места судна по расстояниям до двух ориентиров
Если в видимости судна (на экране навигационной РЛС) имеются только два ориентира, до которых возможно измерить расстояния, то место судна определяется по расстояниям до 2-х ориентиров.
Методика выполнения этого определения аналогична методике определения места судна по расстояниям до 3-х ориентиров (см. п. 14.2.2).
Недостатком этого способа определения места судна является отсутствие контроля правильности полученного места (рис. 14.7).
Две линии (дуги) всегда пересекаются в одной точке даже при наличии погрешностей (промахов),
(есть промахи или их нет – сказать нельзя) (см. п. 13.1.2).
14.2.4.Определение места судна способом «крюйс-расстояние»
Впрактике судовождения может встретиться и такой случай, когда с судна наблюдается всего лишь один ориентир, а возможности взять на него пеленг нет (туман, неисправен курсоуказатель и пр.).
Вэтом случае можно получить счислимо-обсервованное место судна, использовав способ «крюйсрасстояния»→ рис. 14.8.
Судно следует курсом КК 88,0° (+2,0°).
Находясь по счислению в точке  , измерили расстояние до ориентира (мыс Игольный). Пройдя этим курсом некоторое расстояние S, достаточное для изменения направления на этот
, измерили расстояние до ориентира (мыс Игольный). Пройдя этим курсом некоторое расстояние S, достаточное для изменения направления на этот
ориентир на угол не менее 30°, (т. Т2) повторно измерили расстояние до того же ориентира (мыс Игольный), заметив время (Т2) и отсчет лага (ОЛ2).
Счислимо-обсервованное место судна в этом случае найдем, если выполним геометрические построения на путевой карте:
 от ориентира (т. А) проведем вспомогательную линию параллельную курсу судна (линия АБ) и отложим по ней (от т. А) пройденное судном расстояние S за время между измерениями расстояний D1 и
от ориентира (т. А) проведем вспомогательную линию параллельную курсу судна (линия АБ) и отложим по ней (от т. А) пройденное судном расстояние S за время между измерениями расстояний D1 и
D2 (Sл = Кл · РОЛ или Sоб = Vоб · t);
 из точки Б проведем окружность (ее дугу) радиусом, равным истинному расстоянию до ориентира D1 = DР1 + DР, где DР1 – первое измеренное расстояние с РЛС;
из точки Б проведем окружность (ее дугу) радиусом, равным истинному расстоянию до ориентира D1 = DР1 + DР, где DР1 – первое измеренное расстояние с РЛС;
 из точки А проведем окружность (ее дугу) радиусом, равным истинному расстоянию до ориентира D2 = DР2 + DР, где DР2 – второе измеренное расстояние с РЛС.
из точки А проведем окружность (ее дугу) радиусом, равным истинному расстоянию до ориентира D2 = DР2 + DР, где DР2 – второе измеренное расстояние с РЛС.