

Плавание судна (особенно крупнотоннажного) по створу требует от судоводителя большого опыта и тренировки. При частых плаваниях по створам, без помощи лоцмана, судоводитель должен выработать у себя чувство немедленной реакции в отношении стороны и величины перекладки руля вслед за тем, как только створные знаки расстворились.
Правило – «следуй за передним знаком»: → если он правее заднего – «право руля»; если левее – «лево руля». В целях обеспечения более точного совмещения осей знаков створа в верхней части знаков могут устанавливаться топовые фигуры ( и пр.).
и пр.).
Наблюдение створов через оптический пеленгатор способствует более точному удержанию знаков и огней на одной вертикали относительно «нити пеленгатора» и улучшает оценку положения створных знаков (огней) на одной вертикали.
По своему назначению створы подразделяются на: · ведущие; ·навигационные; · секущие (поворотные); · девиационные; · промерные; · речные и т.д.
Ведущие и секущие (поворотные) створы мерной линии рассчитывают, как линейные навигационные створы.
Поворотные створы используются на многоколенных фарватерах и каналах для указания начала поворота с одного колена на другое.
Два таких створа могут указать положение отдельно лежащей опасности.
Взависимости от дальности действия различают:
1.→ створы ближнего действия – до 5 миль;
2.→ створы среднего действия – 5 ÷ 10 миль;
3.→ створы дальнего действия – > 10 миль.
11.4. Радиотехнические средства навигационного оборудования (РТСНО)
Радиотехнические СНО (РТСНО) – специальные космические, наземные или плавучие радиостанции, работающие в радиочастотном диапазоне, предназначенные для решения задач навигации совместно с судовыми ТСН (приемоиндикаторами).
На 1-ом этапе использования РТСНО для определений места судна в море считалось, что наиболее перспективным является развитие сети береговых радиопеленгаторных станций (БРПС).
Однако в последующем было признано более целесообразным пеленговать береговые радиоустановки с помощью судовых радиопеленгаторов. Так получила свое развитие обширная сеть круговых радиомаяков (КРМ).
Затем стали активно использовать РТС для вождения судов по заданным маршрутам с помощью,
так называемых, створных РМ-ков (СРМ) направленного излучения.
Позднее семейство РМ-ков направленного действия (НРМ) пополнилось секторными РМ-ми с характеристикой излучения в виде вращающихся равносигнальных зон (ВРМ, NSPM).
Широкое внедрение в практику судовождения радиолокации с применением НРЛС и береговых РЛС (БРЛС) вызвало появление таких новых типов РТСНО, как радиолокационные отражатели
(РЛО) – пассивные (РЛП) и активные радиолокационные маяки-ответчики (РМО).
Особое развитие получили специальные РНС, представляющие собой совокупность передающих радиостанций, излучающих взаимно синхронизированные сигналы, и судовых приемоиндикаторов (СПИ), принимающих эти сигналы с целью определения места.
Такие РТСНО, дающие высокую точность и надежность определения места, приобрели в свое время важное значение в вопросе обеспечения безопасности мореплавания при самых различных условиях плавания.
Космические РНС, навигационные спутниковые системы (НСС), в которых для определения места с помощью ИСЗ могут использоваться различные средства и методы.
В 1958 г. академик АН СССР В.А.Котельников предложил доплеровский метод для определения параметров орбит ИСЗ.
Низкоорбитальная НСС «Транзит» (США) с 1967 г. применяется для нужд торгового мореплавания. В настоящее время широко используются среднеорбитальные спутниковые РНС «GPS NAVSTAR» (США) и «ГЛОНАСС» (РФ) и (в перспективе) «ГАЛИЛЕО» (ЕС).
11.4.1.Береговые радиопеленгаторные станции (БРПС) и радиомаяки
1.БРПС. Эти станции по запросу судна пеленгуют его и по радио передают на судно значение радиопеленга. Обычно БРПС, работая в группе, передают на судно его обсервованные координаты на определенный момент времени. БРПС не несут ответственности за правдивость сообщаемых судну координат. Широкого развития не получили.
Сведения о БРПС – в Р.V «РТСНО» и в Р.IV т.II английского описания радиосигналов.
2.Радиомаяки (РМ-ки) – это передающие радиостанции с известным мореплавателю положением.
Вустановленное время РМ-ки излучают присвоенные им опознавательные знаки и сигналы на заданных частотах для определения направления на них.
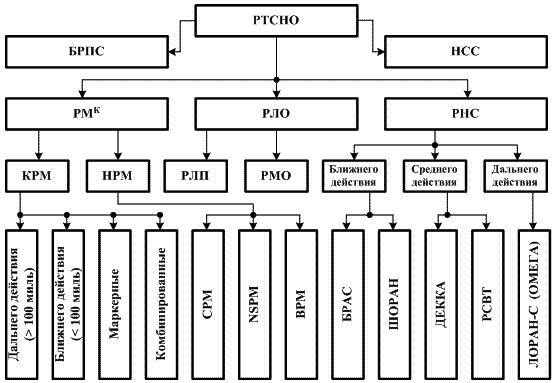
Рис. 11.4. Классификация РТСНО
Все РМ-ки делятся на 2 основные группы: – кругового (КРМ) и направленного (НРМ) излучения. В 1-м случае для определения направления на судне должен быть установлен радиопеленгатор
(РП).
Во 2-м случае – вместо РП можно использовать обычный широковещательный радиоприемник СВ диапазона.
а) Круговые радиомаяки.
На побережье океанов и морей их установлено около 1 тыс.
КРМ-ки разделяют на РМ-ки дальнего действия (> 100 миль), ближнего действия (< 100 миль) и маркерные маломощные автоматические, применяемые для ограждения опасностей, обозначения подходных точек, точек поворотов, отдельных пунктов в труднодоступных для обслуживания районах, а также для «сгущения» сети КРМ-ков ближнего действия.
КРМ-ки просты по устройству береговой аппаратуры, однако имеют ряд серьезных недостатков:
невысокая помехозащищенность;
зависимость точности определения радиопеленга от погрешности курса;
ограниченную возможность использования в темное время суток (ночной эффект);
сравнительно большие погрешности определяемого по ним места судна.
КРМ-ки наиболее эффективно используются днем на удалении от берегов до 150 ÷ 175миль
(ночью – 60 ÷ 75 миль).
Для повышения эффективности КРМ-ки объединяются в навигационные группы (от 2-х до 6-ти в группе), где работают поочередно на одной и той же несущей частоте и излучают сигналы, отличающиеся только опознавательными сигналами и частотой модуляции. Это и обеспечивает строгую

последовательность работы КРМ-ков в любое время суток (маркерные РМ-ки в группы не объединяются).
Сведения о КРМ-ках: Р.III «РТСНО» и в Р.V т.II английского описания радиосигналов.
б) Комбинированные РМ-ки (радиоакустические СНО) – занимают особое место, но широкого распространения не получили. В них применяется радиоакустический метод, основанный на совместном действии РМ-ка с воздушной и (или) подводной акустической установкой. В этом случае РМ-к может действовать совместно с сиреной, тифоном, диафоном, наутофоном и одним из излучателей подводных звуковых сигналов.
Сведения о них в Р.III «РТСНО» либо в Р.V «Радиомаяки» т.II английского описания радиосигналов.
в) Радиомаяки направленного действия (НРМ-ки) по виду характеристики разделяют на створные (СРМ), вращающиеся – с вращающейся характеристикой направленности (NSPM) и с веером вращающихся равносигнальных зон (ВРМ), часто называемых секторными.
3. Секторные радиомаяки (СРМ-ки) работают на основе равносигнального способа определения направления и применяются для проводки судов по прямым фарватерам. Ориентирование судна при плавании по фарватеру, обеспеченному СРМ, осуществляется путем прослушивания и опознания сигналов СРМ-ка, принимаемых на судовой радиоприемник и удержания судна в пределах зоны равной слышимости двух переплетающихся сигналов: например: «А» (· −) и «Н» (− ·).
Сведения о СРМ-ках – в Р.III «РТСНО» или в Р.V т.II английского описания радиосигналов.
а) Вращающиеся радиомаяки (NSРМ) – имеют диаграмму излучения в форме «восьмерки» или «кардиоиды», которая равномерно вращается в горизонтальной плоскости. Эти РМ-ки работают по принципу приема минимума сигнала и позволяют определить место судна с помощью обыкновенного широковещательного приемника. При этом пеленги, полученные по ВРМ, будут более точными, а допустимая дальность пеленгования – значительно большей, чем при работе с NSРМ. Более того, точность определения места судна по ВРМ выше, нежели по пеленгам КРМ-ков.
Принцип действия ВРМ основан на использовании вращающихся равносигнальных зон (РСЗ), которые получаются в результате частотного перемещения в пространстве на некоторый угол многолепестковой диаграммы направленности излучения.
ВРМ-ки устанавливаются в 2-х вариантах:
1.3-х мачтовый – для обслуживания 2-х секторов по 120° каждый, лежащих по обе стороны линии антенн – базы;
2.5-ти мачтовый – для обслуживания всего пространства вокруг маяка в 360°.
Секторные РМ-ки работают по установленному расписанию. Цикл работы 3-х мачтовых ВРМ – 60с (1 мин.): первые 30с РМ-к работает как КРМ-к, вторые 30с излучение становится направленным и РМ-к передает 60 сигналов (точек и тире). По счислимому месту судна устанавливают № сектора, а по числу сигналов, принятых до радиосигнальной зоны определяют направление на судно (Орт. П). Пеленги прокладывают обычно с помощью специальных РНК или таблиц.
Сведения о ВРМ-ках – в Р.II «РТСНО» или в т.V Р.V ч.2 английского описания радиосигналов.
11.4.2. Радиолокационные отражатели (РЛО)
а) Пассивные РЛО – РЛП. Их применяют для повышения отражательной способности навигационных знаков, ППЗ и знаков обозначения отдельных точек, расположенных на водной поверхности или на низменном берегу. Представляют из себя плоскую металлическую пластину (или две расположенные друг к другу по  90°, либо три пластины). Радиолокационная дальность (DP) обнаружения РЛП:
90°, либо три пластины). Радиолокационная дальность (DP) обнаружения РЛП:
(11.1)
где SЭ – эффективная площадь отражения того или иного объекта наблюдения. Если пластина имеет грань в 1 м (0,5 м), а высота установки от уровня моря – 10 м, то D ≈ 14 (7) миль.
РЛП применяют также для повышения надежности опознавания участков береговой черты. Они могут устанавливаться в виде различных геометрических фигур на расстояниях друг от друга, соответствующих разрешающей способности судовых РЛС по пеленгу и дистанции (расстоянию).

б) Радиолокационные маяки-ответчики (РМО).
РМО – устройство, излучающее импульсные радиосигналы в ответ на облучение его импульсами («запросный» сигнал) судовой НРЛС.
Для опознания различных РМО их ответные сигналы (импульсы) кодируются. В качестве кодового сигнала используются буквы по «Морзе». Количество импульсов в ответном сигнале и их взаимное положение образуют кодовую комбинацию данного РМО.
Наибольшая дальность действия РМО в милях:
(11.2)
где Н – высота РМО над уровнем моря (м); h – высота антенны судовой НРЛС (м). РМО имеет два режима работы: 1. → режим ожидания и 2. → режим излучения.
Импульсы РМО создают на ИКО судовой НРЛС характерные легко опознаваемые изображения, позволяющие уверенно определять место судна.
Помимо РМО типа «Ракон» могут быть РМО типа «Рамарка», которые излучают свои импульсы постоянно. На экране НРЛС сигнал от РМО типа «Рамарка» имеет вид пунктира от центра ИКО НРЛС по направлению на РМО.
РМО устанавливаются в районах интенсивного судопотока и сложных в навигационном отношении
– где маяки, береговые и плавучие знаки не дают на экране НРЛС четкого изображения или не опознаются среди других объектов. Кроме того, РМО используются в районах побережья, расположенных вблизи рекомендованных путей и трудно опознаваемых по РЛС.
Большое применение РМО нашли в районах с частыми и длительными туманами, осадками, а также у кромок льда и т.п.
Сведения о РМО – в лоциях, РТСНО (Р.VI), где обычно помещаются название СНО, его координаты, высота над уровнем моря, сектор и дальность действия, задержка ответного сигнала, кодовая комбинация, наличие и максимальный радиус мертвой зоны, теневых секторов и др.
11.4.3. Радионавигационные системы
Радионавигационная система (РНС) – комплекс взаимодействующих («судно ↔ берег») радиотехнических средств, обеспечивающий подвижный объект (судно) навигационной информацией, используемой для определения координат его места, а в некоторых случаях, кроме того, направления и скорости движения.
РНС подразделяются:
а) → по физическому принципу измерения радионавигационного параметра (РНП) на:
1.амплитудные;
2.фазовые;
3.импульсные;
4.частотные;
5.комбинированные.
б) → по определяемому радионавигационному параметру на:
1.угломерные;
2.дальномерные;
3.разностно-дальномерные;
4.комбинированные;
5.суммарно-дальномерные;
6.скоростно-угломерные;
7.разностно-угломерные и др.
Преимущества РНС:
1.→ Независимость измерений от погодных условий, а для ряда РНС и от времени суток;
2.→ Возможность высокоточного определения радионавигационных параметров на больших удалениях от берегов;