

Упражнения
Доказать: а) линейную зависимость векторов
 (2,
–1, 2),
(2,
–1, 2), (3,
1, –2),
(3,
1, –2),
![]() (6,
–3, 6); б) линейную независимость векторов
(6,
–3, 6); б) линейную независимость векторов
![]() (2,
–1, –2),
(2,
–1, –2),![]() (3,
1, 1),
(3,
1, 1),![]() (–4,
2, 1).
(–4,
2, 1).
Доказать, что векторы
 (2,
–1, –1),
(2,
–1, –1), (2,
–3, 0),
(2,
–3, 0), (1,
1, –1) образуют
(1,
1, –1) образуют
базис
геометрического пространства и найти
координаты вектора
![]() (–5,
–4, –2) в этом базисе.
(–5,
–4, –2) в этом базисе.
Доказать, что векторы
 ,
, ,
,
![]() компланарны.
компланарны.
Определить компоненты и записать разложение вектора
 в ортонорми-
в ортонорми-
рованном
базисе
![]() ,
если
,
если![]() = 2 и этот вектор составляет с осями
абсцисс и ординат углы по 45.
= 2 и этот вектор составляет с осями
абсцисс и ординат углы по 45.
5. Выяснить, является ли векторным подпространством данное множест-
во векторов в п-мерном векторном пространстве К над полем Р и, если является, найти его размерность: а) множество векторов, все координаты которых равны между собой; б) множество векторов, сумма координат которых равна 0; в) множество векторов, сумма координат которых равна 1.
Глава 5 матрицы
Определение
1.
Матрица
А
над полем Р,
состоящая из k
– строк и
m – столбцов, есть прямоугольная таблица элементов ![]() где
где![]()
Определение
2.
Произведение
числа строк k
на число столбцов m
матрицы k ×
m
(k на
m), равное
числу элементов матрицы
![]() ,
называетсяразмером
матрицы.
,
называетсяразмером
матрицы.
Следует заметить, что матрицы с одинаковым числом элементов могут иметь разную размерность. Например, размерности матриц из m строк и n столбцов (m × n) и n строк и m столбцов (n × m) неодинаковы.
§1. Ранг матрицы. Элементарные преобразования матриц
Как было уже сказано, матрицу А размера k×m можно рассматривать как задание системы из m вектор-столбцов в пространстве Рk или из k вектор-строк в пространстве Pm. Можно показать (доказательство этой теоремы опускаем), что ранги систем вектор-столбцов и вектор-строк одинаковы.
Определение. Общее значение ранга системы вектор-столбцов (либо вектор-строк), заданных матрицей А, называется рангом этой матрицы и обозначается r(A).
Основываясь на выводах теорем о линейно зависимых и линейно независимых векторах, можно установить, что r(A) min(k,m), а также следующие элементарные преобразования матрицы, которые не изменяют ее ранга.
Элементарные преобразования матрицы:
1. Умножение строки (столбца) матрицы на число, отличное от нуля;
2. Прибавление к элементам одной строке (столбцу) матрицы соответствующих элементов другой строки (столбца) этой матрицы;
Перестановка двух строк (столбцов) местами данной матрицы.
Комбинируя элементарные преобразования, мы можем к любой строке (столбцу) матрицы прибавить линейную комбинацию остальных строк (столбцов) и при этом ранг матрицы также не изменяется. При помощи элементарных преобразований любую матрицу

![]()

можно привести к виду

 В
=
В
=
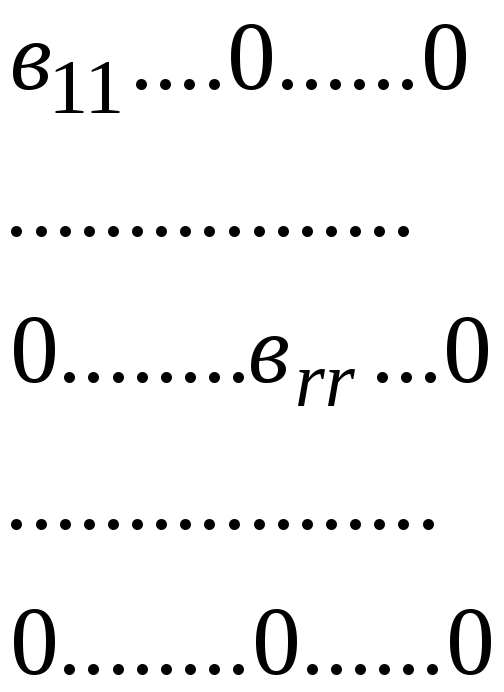 илиЕ
=
илиЕ
=
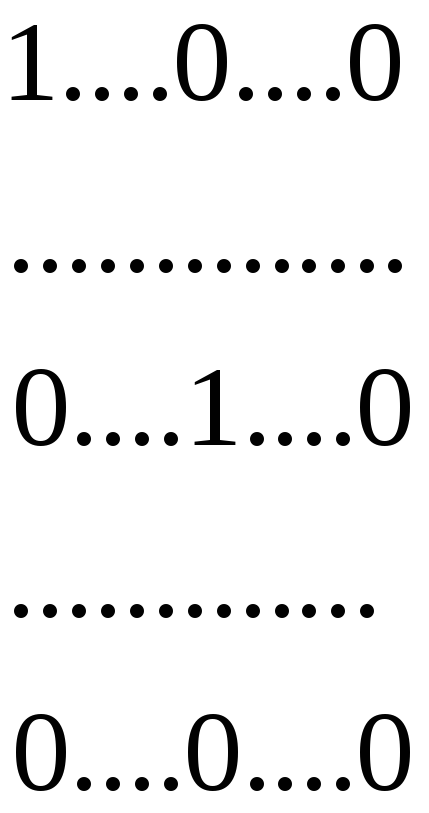
где вii 0, i = 1,2,...,r, r min (k,m). Ясно, что число r ненулевых элементов равно рангу матрицы: r = r (A) = r (B) = r (E). Таким способом можно определять ранг любой матрицы.
Теперь
рассмотрим матрицу А
размером k
m
как характеристику линейного отображения
![]() где
где![]() ,
а
,
а![]() В этом случае ранг матрицы равен рангу
этого линейного отображения. Действительно,
система из вектор-столбцов матрицыА
состоит из m
векторов, принадлежащих
В этом случае ранг матрицы равен рангу
этого линейного отображения. Действительно,
система из вектор-столбцов матрицыА
состоит из m
векторов, принадлежащих
![]() ,
а множество отображений
,
а множество отображений
![]() является линейной оболочкой системы
вектор-столбцов матрицы А.
Таким образом, размерность подпространства
отображений
является линейной оболочкой системы
вектор-столбцов матрицы А.
Таким образом, размерность подпространства
отображений
![]() (ранг линейного
отображения) равен рангу системы
вектор-столбцов (ранг матрицы), порождающих
это подпространство.
(ранг линейного
отображения) равен рангу системы
вектор-столбцов (ранг матрицы), порождающих
это подпространство.
Как
мы уже установили раньше, отображение
![]() будет взаимно однозначно тогда и только
тогда, когда размерности пространств
совпадаютk
= m
и равны рангу r
отображения, т.е. r
= k
= m.
Следовательно, матрица, определяющая
взаимно однозначное отображение должна
быть размером m×m
(квадратная), а ее ранг r(А)
равен m.
будет взаимно однозначно тогда и только
тогда, когда размерности пространств
совпадаютk
= m
и равны рангу r
отображения, т.е. r
= k
= m.
Следовательно, матрица, определяющая
взаимно однозначное отображение должна
быть размером m×m
(квадратная), а ее ранг r(А)
равен m.