

1.1. Матрица перехода, связанная с преобразованием
системы координат в геометрическом пространстве
Матрицу
перехода в геометрическом пространстве
запишем для ортонормированных базисов.
Выберем в качестве первого базиса
![]() и
свяжем с ней систему координатx,
y,
z,
а в качестве второго
и
свяжем с ней систему координатx,
y,
z,
а в качестве второго
![]() и
связанную с ней систему координатx',y',z'
(рис.2.8). Тогда
и
связанную с ней систему координатx',y',z'
(рис.2.8). Тогда

![]() z'
y'
z'
y'
z
x`




 у
у
![]()
![]()
![]()
0
![]()
![]()


![]()


0 x
Рис. 2.8
![]() ,
,
![]() ,
(8.1)
,
(8.1)
![]() .
.
Если
первую строку умножить последовательно
на
![]() ,
учитывая, что
,
учитывая, что
![]() а
а
![]()
то
получим:
![]()
![]() ;
;![]()
![]() ;
;![]() .
.
Поступая
аналогично со второй и третьей строками
равенства, находим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Таким образом, матрица перехода Т одного ортонормированного базиса к другому ортонормированному базису, связанная с преобразованием системы координат в геометрическом пространстве, имеет вид
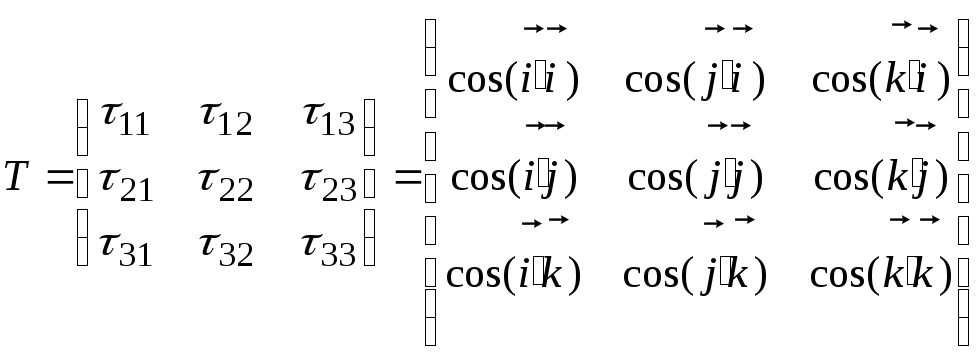 (8.2)
(8.2)
и
ее элементы определяются косинусами
углов, которые образуются при повороте
новой системы координат относительно
старой. Если поворота системы координат
при их преобразовании не происходит, а
это наблюдается при параллельном
переносе системы координат, тогда
![]()
![]() а остальные косинусы равны нулю. Поэтому
матрица перехода для параллельного
переноса системы координат является
единичной
а остальные косинусы равны нулю. Поэтому
матрица перехода для параллельного
переноса системы координат является
единичной
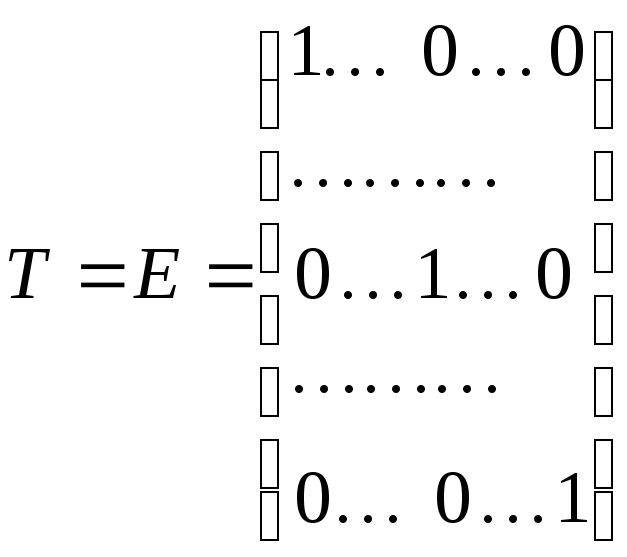 .
.
Теперь
рассмотрим матрицу перехода Т
как матрицу линейного отображения
![]() пространстваR3
на себя. Пусть
пространстваR3
на себя. Пусть
![]() – радиус-вектор некоторой точкиМ
в системе координат
– радиус-вектор некоторой точкиМ
в системе координат
![]() .
В системе координатx,
y,
z этот же
вектор имеет разложение:
.
В системе координатx,
y,
z этот же
вектор имеет разложение:
![]()
где
x0,
y0,
z0
координаты
начала координат
![]() в системе координатx,
y,
z. Тогда
вектор
в системе координатx,
y,
z. Тогда
вектор
![]() ,
а
,
а![]()
и
они принадлежат пространству R3.
Поэтому отображение
![]() в координатной форме имеет вид:
в координатной форме имеет вид:
![]() или
или![]() (8.3)
(8.3)
Отсюда мы получаем формулу для изменения координат точки М при преобразовании системы координат в общем случае, когда происходит и параллельный перенос, и поворот системы координат.
![]() или
или
![]() (8.4)
(8.4)
В
формулах (8.3) и (8.4) предполагаются
известными
 и
и ,
т.е. известны координаты точкиМ
в новой
системе координат и отыскиваются
координаты точки в старой системе.
,
т.е. известны координаты точкиМ
в новой
системе координат и отыскиваются
координаты точки в старой системе.
Более
естественной является обратная задача,
когда известны Х0
и Х,
а требуется найти
![]() .
Для этого случая полагаем
.
Для этого случая полагаем![]() и тогда
и тогда
откуда

 (8.5)
(8.5)
1.2. Ортогональные матрицы перехода
Если мы все строки равенства (8.1) возведем в квадрат или перемножим между собой, то получим следующую систему равенств:
= , (8.6)
где – символ Кронекера,
Следовательно, в матрице Т (8.2) сумма квадратов элементов, расположенных в каждом столбце ( равна 1, а сумма произведений соответствующих элементов двух любых различных столбцов ( равна нулю. Матрицы такого типа называются ортогональными.
Систему равенств (8.6), которая имеет место для элементов ортогональной матрицы Т можно переписать еще и в виде следующего условия ТТ·T=E или TT = T–1, где TT – транспонированная, а T–1 – обратная матрицы к Т.
Затем,
если
![]() естьj-й
вектор-столбец в Т
с компонентами
естьj-й
вектор-столбец в Т
с компонентами
![]() ,
то соотношение (8.6) означает, что скалярное
произведение
,
то соотношение (8.6) означает, что скалярное
произведение![]() ,j = 1,
2, 3, i = 1,
2, 3 и, стало быть, вектор-столбцы
,j = 1,
2, 3, i = 1,
2, 3 и, стало быть, вектор-столбцы
![]() ,j = 1,
2, 3 ортогональной
матрицы Т
образуют ортонормированный базис.
,j = 1,
2, 3 ортогональной
матрицы Т
образуют ортонормированный базис.
Данное определение ортогональных матриц распространяется не только на матрицы перехода третьего порядка п = 3, но и на матрицы порядка n > 3.
Определение. Квадратная матрица S = (ij ), где i = 1, 2,..., n, j = 1, 2,..., n, для которой ST·S = E (или 1i 1j 2i 2j ......+ ninj ij, где ij – символ Кронекера), называется ортогональной.
Из этого определения также следует, что для того, чтобы матрица была ортогональной, необходимо и достаточно, чтобы либо ее вектор-столбцы (либо вектор-строки) образовывали ортонормированный базис в Rn.
Определитель D(S) ортогональной матрицы S равен +1 или –1. Действительно, так как определитель произведения матриц равен произведению определителей сомножителей, то
D(S·ST)
= D(S)
· D(ST)
= [D(S)]2
=
D(E)
= 1
и,
следовательно,
D(S)
= 1.
Значения
+1 и –1 соответствуют различной ориентации
вектор-столбцов, образующих базис. Так,
если в качестве вектор-столбцов в S
выбрать канонический ортонормированный
базис
![]()
![]() ,........,
,........,![]() ,
получимS = E
и D(S)
= +1. Если же
мы возьмем ортонормированный базис
,
получимS = E
и D(S)
= +1. Если же
мы возьмем ортонормированный базис
![]()
![]() ,.......,
,.......,![]() ,
то отвечающая ему ортогональная матрицаS´будет
иметь определитель D(S´)=
–1.
,
то отвечающая ему ортогональная матрицаS´будет
иметь определитель D(S´)=
–1.