

§3. Вещественные линейные и квадратичные формы
Рассмотрим
векторное пространство Rn
над полем
R,
в котором
задан базис
![]() и пусть
и пусть![]() –
произвольный
вектор этого пространства, iR.
–
произвольный
вектор этого пространства, iR.
Определение
1.
Вещественной
линейной
формой
называется линейное отображение
пространства Rn
в R,
которое каждому
![]() ставит в соответствие число
ставит в соответствие число![]() изR, где
i
и i
– числа из R.
Линейную форму называют также однородной
формой первой степени, и чаще всего ее
записывают в следующем виде:
изR, где
i
и i
– числа из R.
Линейную форму называют также однородной
формой первой степени, и чаще всего ее
записывают в следующем виде:
![]() ,
где
,
где![]() .
.
![]() Определение
2.
Вещественной квадратичной
формой
называется линейное отображение Rn
в R,
которое
каждому
Определение
2.
Вещественной квадратичной
формой
называется линейное отображение Rn
в R,
которое
каждому
![]() ставит в соответствие число
ставит в соответствие число изR, где
изR, где
![]() – координаты
вектора
– координаты
вектора
![]() ,
,![]() – числа изR,
для которых
выполняется равенство
– числа изR,
для которых
выполняется равенство
![]() .
.
Из
определения следует, что
![]() .
Поэтому квадратичная форма есть
однородная форма второй степени.
.
Поэтому квадратичная форма есть
однородная форма второй степени.
Пример.

=![]()
![]()
![]()
3.1. Приведение квадратичной формы к каноническому виду
Квадратичную
форму можно записать и при помощи
матрицы. Для этого вектору
![]() изRn
поставим в
соответствие две матрицы: матрицу-столбец
изRn
поставим в
соответствие две матрицы: матрицу-столбец
 и матрицу-строкуX
Т
= (
n).
Ясно, что X Т
является транспонированной матрицей
к X.
Для коэффициентов ij
квадратичной
формы введем действительную матрицу
и матрицу-строкуX
Т
= (
n).
Ясно, что X Т
является транспонированной матрицей
к X.
Для коэффициентов ij
квадратичной
формы введем действительную матрицу
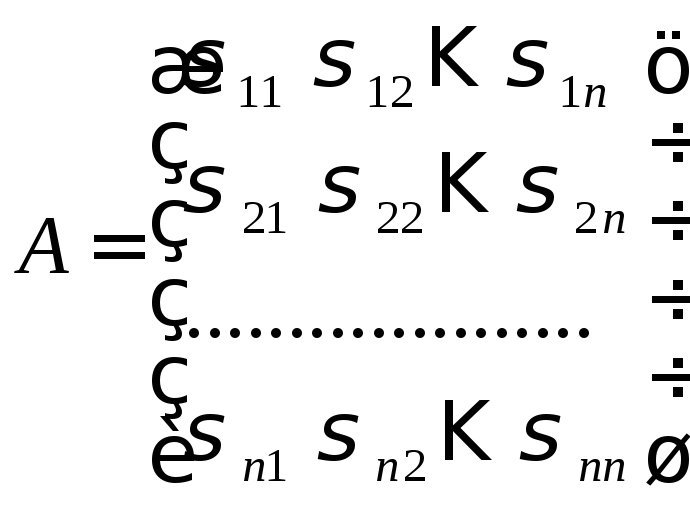 .
Тогда
.
Тогда
 .
.
Матрица А называется матрицей квадратичной формы и поскольку для коэффициентов квадратичной формы ij ji, то матрица А является симметрической.
Рассмотрим,
как изменяется матрица А
при переходе в Rn
от одного ортонормированного базиса к
другому. Обозначим матрицу перехода
через Т,
а координаты вектора
![]() в новом базисе через
в новом базисе через![]() .
Тогда
.
Тогда![]() ,
или в матричной формеX
= TY, где Т
ортогональная матрица. Поэтому для
квадратичной формы имеем
,
или в матричной формеX
= TY, где Т
ортогональная матрица. Поэтому для
квадратичной формы имеем
![]() ,
гдеВ = ТТАТ.
,
гдеВ = ТТАТ.
Но так как Т ортогональна, то ТТ = Т–1 ; значит В = Т–1АТ, т.е. В преобразована из А посредством матрицы Т. Кроме того, преобразованная матрица В – тоже симметрическая, ибо
ВТ = (Т–1АТ)Т = (ТТАТ)Т = ТТАТ(ТТ)Т = ТТАТ = В.
Поскольку АТ = А.
Так
как матрица А
симметрическая, то Rn
обладает хотя бы одним ортонормированным
базисом
![]() ,
составленным из собственных векторов
матрицыА;
тогда если в качестве нового базиса
выбрать базис
,
составленным из собственных векторов
матрицыА;
тогда если в качестве нового базиса
выбрать базис
![]() ,
то преобразованная матрица в этом базисе
,
то преобразованная матрица в этом базисе![]() и имеет диагональный вид
и имеет диагональный вид
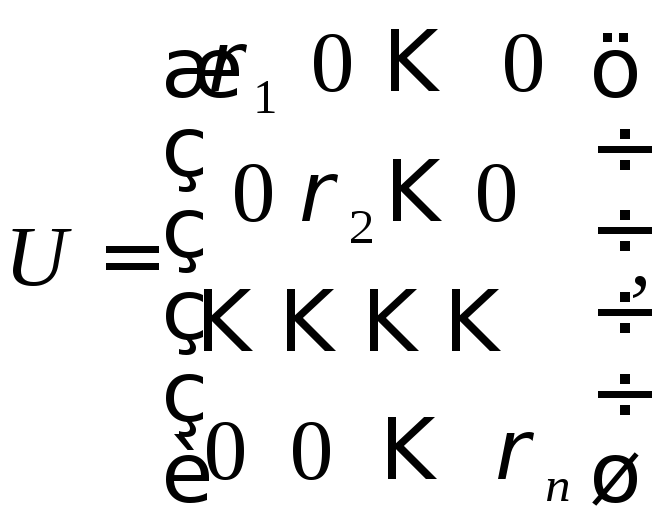
здесь собственные значения i матрицы А могут быть как различные, так и совпадающие, но все действительные. Если матрица квадратичной формы диагональная, то квадратичная форма принимает вид:
![]() ,
гдеz1,
z2,
... zn
–
координаты вектора
,
гдеz1,
z2,
... zn
–
координаты вектора
![]() ,
разложенным по базису
,
разложенным по базису![]() .
.
Таким
образом, относительно базиса
![]() ,
составленного из собственных векторов
матрицы квадратичной формы, квадратичная
форма имеет только члены с квадратами;
говорят, что она приведена кканоническому
виду.
,
составленного из собственных векторов
матрицы квадратичной формы, квадратичная
форма имеет только члены с квадратами;
говорят, что она приведена кканоническому
виду.
Пример. Привести к каноническому виду квадратичную форму
![]() =
3х
=
3х![]() + 4х1х2
+ х
+ 4х1х2
+ х![]() ,
где
,
где![]() .
.
Составляем матрицу квадратичной формы:
 (см.
пример в начале параграфа).
(см.
пример в начале параграфа).
Записываем характеристическое уравнение
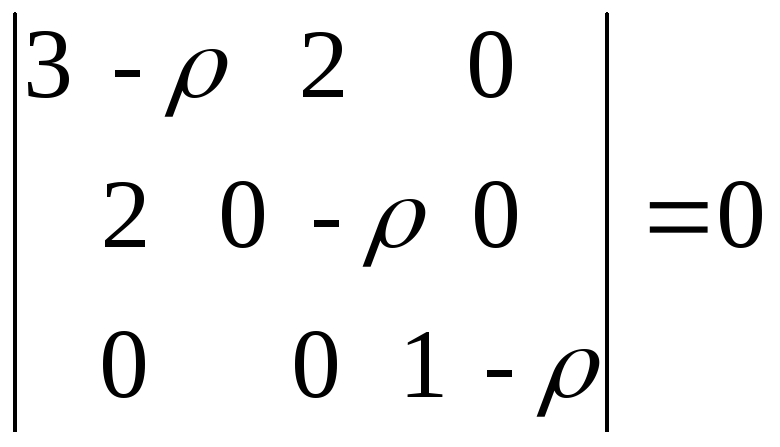 ,
откуда
.
,
откуда
.![]()
Решая последнее уравнение, находим собственные числа:
3
.
Обозначим координаты вектора
![]() в системе собственных векторов матрицы
черезz1,
z2,
z3.
Тогда квадратичная форма имеет вид
в системе собственных векторов матрицы
черезz1,
z2,
z3.
Тогда квадратичная форма имеет вид
![]() .
.
Находим ортонормированные собственные вектора матрицы:
![]() ;
;
![]() ;
;![]() .
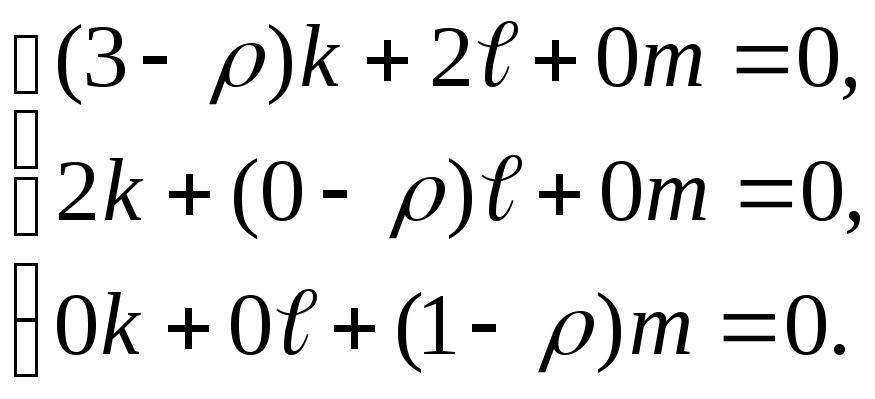
Для этого уравнениеА(
.
Для этого уравнениеА(![]() )
=
)
=![]() записываем
в координатной форме:
записываем
в координатной форме:
 или
или
Положим
![]()
![]() .
Тогда система принимает вид:
.
Тогда система принимает вид:

Эта
сиcтема
имеет единственное решение
![]() ,
,![]() .
Величина компоненты
.
Величина компоненты
![]() любая. Чтобы вектор
любая. Чтобы вектор
![]() был нормированным, т.е. чтобы
был нормированным, т.е. чтобы![]() ,
примем
,
примем![]() .
Имеем
.
Имеем![]() .
.
Поскольку
![]() ,
то система принимает вид:
,
то система принимает вид:

Отсюда
![]() ,
,![]() ,
,![]() ,
где
,
где![]() любое действительное число. Нормируя,
получаем
любое действительное число. Нормируя,
получаем![]()
![]() ;
;![]() ;
;![]() .
Следовательно,
.
Следовательно,![]() .
.
Для
третьего собственного числа
![]() имеем систему:
имеем систему:

Отсюда
![]() ,
,![]() ,
,![]() ,
где
,
где![]() –
любое действительное число. Нормируя
–
любое действительное число. Нормируя![]() ,
находим
,
находим![]() ,
,![]() ,
,![]() ,
т.е. вектор
,
т.е. вектор![]() .
Таким образом, собственные векторы
квадратичной формы:
.
Таким образом, собственные векторы
квадратичной формы:![]() ,
,![]() ,
,![]() ,
а каноническая форма квадратичной
формы:
,
а каноническая форма квадратичной
формы:![]() .
.