

4.6.3. Уравнивание полигонометрического хода
На местности пройден одиночный полигонометрический ход (рис. 4.9) между исходными линиями АВ и СD.
Координаты исходных пунктов В и С и дирекционные углы исходных направлений:
ХВ = 8365,344 м ; ХС = 9592,268 м ; αАВ = 137° 13'16,4";
УВ = 5240,647 м ; УС = 7556,681 м ; αСD = 100° 58'45,8".
Значения измеренных величин, горизонтальных углов и расстояний, приведены в табл. 4.11.
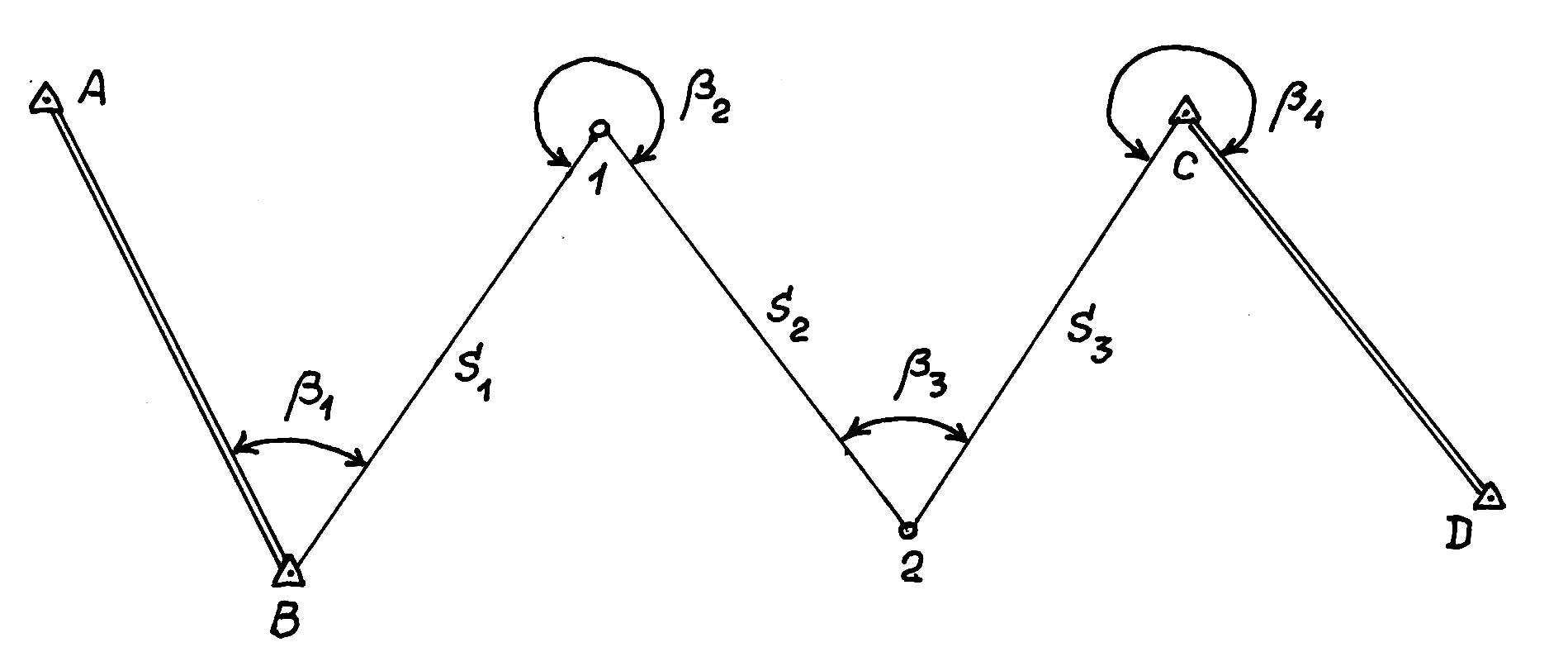
Рис. 4.9. Схема полигонометрического хода
Таблица 4.11
Исходные данные
-
№№ точек
Обозначение горизонтальных углов, βi
Значения горизонтальных углов
Обозначение расстояний,
si
Значения расстояний, м
В
β1112о 36'45,4"
s1
1245,638
1
β2213о 02'16,8"
s2
963,017
2
β’
88о 44'26,7"
s3
1033,151
С
β4269о 22'04,0"
Точность результатов измерений: горизонтальных углов: mβ = 2,0"; расстояний ms = 14,5 мм на 1000 м.
Требуется найти уравненные значения координат точек 1 и 2.
Решение примера.
Выполним предварительные вычисления в полигонометрическом ходе (см. табл. 4.12), т.е. по результатам измерений вычислим предварительные значения координат точек 1 и 2, а также координаты точки Со.
Таблица 4.12
Предварительные вычисления в полигонометрическом ходе
№№ точек |
Гориз.углы β |
Дирекц.углы α |
Рассто-яния s , м |
Приращения координат, м |
Координаты, м |
№3 точек |
||
|
|
|
|
|||||
А |
|
|
|
|
|
|
|
A |
137о 13'16,4" |
|
|
|
|||||
В |
112о 36'45,4" |
8365,344 |
5240,647 |
B |
||||
69о 50'01,8" |
1245,638 |
+429,426 |
+1169,276 |
|||||
1 |
213о 02'16,8" |
8794,770 |
6409,923 |
1 |
||||
102о 52'18,6" |
963,017 |
-214,532 |
+938,817 |
|||||
2 |
88о 44'26,7" |
8580,238
|
7348,740 |
2 |
||||
11о 36'45,3" |
1033,151 |
+1012,003 |
+207,966 |
|||||
С |
269о 22'04,0" |
9592,241 |
7556,706 |
Cо |
||||
100о 58'49,3" |
|
|
|
|||||
D |
|
|
|
|
||||
|
|
|
|
|||||
Вычислим веса pi измеренных величин. В полигонометрическом ходе считаем измерения углов равноточными, т.е. pβi = 1. Значения средних квадратических ошибок для измеренных расстояний определим как
Значения весов и обратных весов измеренных расстояний определим по формуле (3.45):
Присвоим номера измеренным величинам (табл. 4.13).
Таблица 4.13
Значения весов и обратных весов измеренных величин
Обозначение |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
β 1 |
β 2 |
β 3 |
β 4 |
s1 |
s2 |
s3 |
|
pi |
1 |
1 |
1 |
1 |
1,221 |
2,041 |
1,778 |
qi |
1 |
1 |
1 |
1 |
0,819 |
0,490 |
0,562 |
Шаг 1. Общее число измерений n = 7. Число необходимых измерений k = 4 (например, 1, 2, 5 и 6 – табл. 4.13). Число избыточных измерений r = 3.
Шаг 2. Составим r = 3 условных уравнения:
- условие дирекционных углов:
![]() (4.144)
(4.144)
- условие координат (для абсцисс и ординат):
 (4.145)
(4.145)
Шаг 3. Приведем условные уравнения к линейному виду, для чего продифференцируем данные функции по переменным βi, si и αi (последние – зависящие от βi ).
Рассмотрим здесь несколько подробнее процесс получения условных уравнений поправок.
После дифференцирования получим условные уравнения поправок:
- для дирекционных углов:
![]() ,
(4.146)
,
(4.146)
где
![]() ;
невязка Wβ
или свободный член уравнения –
;
невязка Wβ
или свободный член уравнения –
![]() (здесь
αCD0
– вычисленное значение дирекционного
угла из табл. 4.12 в предварительной
обработке полигонометрического хода);
(здесь
αCD0
– вычисленное значение дирекционного
угла из табл. 4.12 в предварительной
обработке полигонометрического хода);
- для абсцисс:
![]() (4.147)
(4.147)
где
невязка
![]() (здесь
хС0
– вычисленное значение координаты
точки С
из предварительной обработки
полигонометрического хода, табл. 4.12);
(здесь
хС0
– вычисленное значение координаты
точки С
из предварительной обработки
полигонометрического хода, табл. 4.12);
- для ординат:
![]() (4.148)
(4.148)
где
невязка
![]() (здесь yC0
– вычисленное значение координаты
точки С
из предварительной обработки
полигонометрического хода, табл. 4.12).
(здесь yC0
– вычисленное значение координаты
точки С
из предварительной обработки
полигонометрического хода, табл. 4.12).
Вычислим свободные члены уравнений, пользуясь исходными данными и результатами предварительной обработки полигонометрического хода:
W1 = Wβ = 100° 58'49,3" – 100° 58' 45,8''= +0,5";
W2 = Wx = 9592,241 – 9592,268 = - 0,027 м = - 2,7 см;
W3 = Wy = 7556,706 – 7556,681 = + 0,025 м = + 2,5 см.
Поправка vαi в текущее значение дирекционного угла равна сумме поправок углов β, использующихся для его вычисления, т.е.
![]() .
(4.149)
.
(4.149)
С учетом этого, а также предыдущих выражений, запишем окончательные условные уравнения поправок в общем виде:
 (4.150)
(4.150)
где ρ – угловая мера радиана.
В уравнениях (4.150) для удобства значения 1/ ρ увеличивают в 100000 раз, а разности координат уменьшают в то же число раз, т.е. выражают в километрах.
В развернутом виде уравнения (4.150) для рассматриваемого в примере полигонометрического хода имеют вид:
 (4.151)
(4.151)
Составим таблицу (табл. 4.14) значений разностей координат и тригонометрических функций дирекционных углов по данным табл. 4.12, необходимую для вычисления коэффициентов aij.
Таблица 4.14
Разности координат (км) и значения тригонометрических функций
дирекционных углов
№№ точек |
Значения sin и cos дирекционных углов |
Значения разностей координат, км |
||
Cos α |
Sin α |
xC0 – xi0 |
yC0 – yi0 |
|
B |
|
|
+1,2269 (В) |
+2,3161(В) |
+0,3447 |
+0,9387 |
+0,7975 (1) |
+1,1468 (1) |
|
1 |
||||
- 0,2228 |
+0,9749 |
+1,0120 (2) |
+0,2080 (2) |
|
2 |
||||
+0,9795 |
+0,2013 |
|
|
|
C |
||||
C учетом приведенных в табл. 4.14 значений коэффициентов и значений свободных членов получим окончательный вид условных уравнений поправок, соответствующих выражениям (4.151):
 (4.152)
(4.152)
Составим матрицу коэффициентов aij и обратных весов qi (табл. 4.15).
Таблица 4.15
Матрица коэффициентов aij и обратных весов
i→ j ↓ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
1 |
+1 |
+1 |
+1 |
+1 |
0 |
0 |
0 |
2 |
+1,1229 |
-0,5560 |
-0,1008 |
|
+0,3447 |
-0,2228 |
+0,9795 |
3 |
+0,5948 |
+0,3866 |
+0,4906 |
|
+0,9387 |
+0,9749 |
+0,2013 |
qi |
1 |
1 |
1 |
1 |
0,819 |
0,490 |
0,562 |
Шаг 4. По правилам и схеме, приведенным в разделе 3, вычислим коэффициенты нормальных уравнений коррелат. Сначала представим указанные уравнения коррелат в общем для приводимого примера виде:
1. (q1a112 + q2a212 + q3a312 + q4a412)k1 + (q1a11a12 + q2a21a22 +q3a31a32)k2 + +(q1a11a13 + q2a21a23 + q3a31a33)k3 + W1 = 0;
2. (q1a12a11 + q2a22a21 +q3a32a31)k1 + (q1a122 + q2a222 + q3a322 + q5a522 + q6a622 + q7a722)k2 + (q1a12a13 + q2a22a23 + q3a32a33 + q5a52a53 + q6a62a63 + q7a72a73)k3 +
+ W2 = 0;
3. (q1a13a11 + q2a23a21 +q3a33a31)k1 + (q1a13a12 + q2a23a22 + q3a33a32 + q5a53a52 + +q6a63a62 + q7a73a72)k2 + (q1a132 + q2a232 + q3a332 + q5a532 + q6a632 + q7a732)k3 +
+ W3 = 0.
(4.153)
После подстановки значений aij, qi и Wj получим:
+4 k1 – 2,6869k2 + 1,4720k3 + 3,5 = 0;
– 2,6869k1 + 3,2469 k2 – 1,1080k3 – 2,7 = 0; (4.154)
1,4720 k1 – 1,1080 k2 + 1,9541 k3 + 2,5 = 0.
Из решения системы линейных уравнений по правилам, изложенным в разделе 6, получим: k1 = - 0,4489; k2 = +0,1722; k3 = - 0,8436.
Контрольные вычисления по исходным уравнениям (4.154) удовлетворяют указанным условиям.
Шаг 5. Составим и решим условные уравнения поправок, пользуясь данными табл. 4.15:
v1 = vβ1 = q1(k1 – 1,1229 k2 + 0,5948 k3) = -1,14'' ≈ -1,1'';
v2 = vβ2= q2(k1 – 0,5560k2 + 0,3866 k3) = -0,87'' ≈ -0,9'';
v3 = vβ3 = q3 (k1 – 1,1080k2 + 0,4906 k3) = -1,05'' ≈ -1,1'';
v4 = vβ4= q4 k1 = -0,45'' ≈ -0,4'';
v5 = vs1 = q5 (+ 0,3447 k2 + 0,9387 k3) = - 0,60 см = - 6 мм ;
v6 = vs2 = q6 (-0,2228 k2 + 0,9749 k3) = - 0,42 cм = - 4 мм ;
v7 = vs3 = q7 (+ 0,9795 k2 + 0,2013 k3) = 0,0 cм = 0 мм.
Контроль выполняется подстановкой полученных значений в уравнения поправок (4.152). Отклонения в приводимом примере от условий можно считать незначительными.
Шаг 6. Вычислим уравненные значения измеренных величин, округлив поправки в углы до 0,1", поправки в длины линий – до 1мм.
β'1 = 112о36'45,4" – 1,1" = 112о36'44,3";
β'2 = 213о02'16,8" - 0,9" = 213о02'15,9";
β'3 = 88о44'26,7" - 1,1" = 88о44'25,6";
β'4 = 269о22'04,0" - 0,4" = 269о22'03,6";
s'1 = 1245,638 – 0,006 = 1245,634 м;
s'2 = 963,017 – 0,004 = 963,013 м;
s'3 = 1033,151 + 0,000 = 1033,151 м.
Составим ведомость уравнивания (табл. 4.16).
Как видно, после уравнивания получились остаточные невязки Wx = 9592,259 – 9592,268 = - 9 мм; Wу = 7556,681 – 7556,681 = 0 мм. Угловая невязка равна нулю. Это является результатом ощутимой нелинейности исходных условных уравнений, т.е. ограничение первым членом разложения функций в ряд Тейлора оказалось недостаточным. В таких случаях выполняют повторное уравнивание, считая полученные после первого уравнивания невязки исходными (Wβ = 0; Wx = - 0,9 см; Wу = 0,0 см), а вычисления в табл. 4.16 – предварительными.
Таблица 4.16
Ведомость уравнивания (1-е приближение)
№№ точек |
Гориз.углы β |
Дирекц.углы α |
Рассто-яния s , м |
Приращения координат, м |
Координаты, м |
№3 точек |
||
|
|
|
|
|||||
А |
|
|
|
|
|
|
|
A |
137о 13'16,4" |
|
|
|
|||||
В |
112о 36'44,3" |
8365,344 |
5240,647 |
B |
||||
69о 50'00,7" |
1245,632 |
+429,430 |
+1169,268 |
|||||
1 |
213о 02'15,9" |
8794,774 |
6409,915 |
1 |
||||
102о 52'16,6" |
963,013 |
-214,522 |
+938,815 |
|||||
2 |
88о 44'25,6" |
8580,252
|
7348,730 |
2 |
||||
11о 36'42,2" |
1033,151 |
+1012,007 |
+207,951 |
|||||
С |
269о 22'03,6" |
9592,259 |
7556,681 |
C |
||||
100о 58'45,8" |
|
|
|
|||||
D |
|
|
|
D |
||||
|
|
|
|
|||||
Только в качестве примера продолжим уравнивание полигонометрического хода вторым приближением. Полученные остаточные невязки в первом приближении практически можно считать допустимыми.
По аналогии с табл. 4.14 должна быть составлена другая таблица. Но, поскольку изменения в синусах и косинусах дирекционных углов и координатах после первого уравнивания незначительные, то для составления уравнений поправок (4.151) используем те же коэффициенты, а вместо значений Wj используем их величины, полученные после первого уравнивания. В результате имеем:
 (4.157)
(4.157)
Таблица коэффициентов aij и обратных весов в данном случае имеет тот же вид (табл. 4.15), в связи с чем нормальные уравнения коррелат для второго уравнивания запишем в виде:
+4 k1 – 2,6869k2 + 1,4720k3 = 0;
– 2,6869k1 + 3,2469 k2 – 1,1080k3 – 0,9 = 0; (4.158)
1,4720 k1 – 1,1080 k2 + 1,9541 k3 = 0.
Из решения полученной системы линейных уравнений:
k1 = +0,4042 ; k2 = +0,6307; k3 = + 0,0542.
Контроль подстановкой в уравнения (4.158) показал правильность вычисления коррелат.
Используя формулы (4.156), получим поправки из второго уравнивания и составим ведомость второго уравнивания (табл. 4.17).
v1 = vβ1 = q1(k1 – 1,1229 k2 + 0,5948 k3) = ≈ 0,2";
v2 = vβ2= q2(k1 – 0,5560k2 + 0,3866 k3 = 0,0";
v3 = vβ3 = q3 (k1 – 1,1080k2 + 0,4906 k3) = ≈ 0,2" ;
v4 = vβ4= q4 k1 = +0,4";
v5 = vs1 = q5 (+ 0,3447 k2 + 0,9387 k3) = +2 мм ;
v6 = vs2 = q6 (-0,2228 k2 + 0,9749 k3) = 0мм ;
v7 = vs3 = q7 (+ 0,9795 k2 + 0,2013 k3) = 4 мм.
Таблица 4.17
Ведомость уравнивания (2-е приближение)
№№ точек |
Гориз.углы β |
Дирекц.углы α |
Рассто-яния s , м |
Приращения координат, м |
Координаты, м |
№3 точек |
||
|
|
|
|
|||||
А |
|
|
|
|
|
|
|
A |
137о 13'16,4" |
|
|
|
|||||
В |
112о 36'44,1" |
8365,344 |
5240,647 |
B |
||||
69о 50'00,5" |
1245,634 |
+429,432 |
+1169,270 |
|||||
1 |
213о 02'15,9" |
8794,776 |
6409,917 |
1 |
||||
102о 52'16,4" |
963,013 |
-214,521 |
+938,816 |
|||||
2 |
88о 44'25,4" |
8580,255
|
7348,733 |
2 |
||||
11о 36'41,8" |
1033,155 |
+1012,011 |
+207,950 |
|||||
С |
269о 22'04,0" |
9592,266 |
7556,683 |
C |
||||
100о 58'45,8" |
|
|
|
|||||
D |
|
|
|
D |
||||
|
|
|
|
|||||
Остаточные невязки составляют:Wβ = 0; Wx = 9592,266 – 9592,268 = = - 2 мм; Wу = 7556,683 – 7556,681 = + 2 мм, что является вполне приемлемым.