

4.8. Нестрогие способы уравнивания
В разделах 4.6 и 4.7 рассмотрены примеры т.н. строгих способов уравнивания геодезических построений (коррелатный и параметрический способы). Эти способы позволяют полностью реализовать в той или иной схеме метод наименьших квадратов практически для любых по сложности построений.
В некоторых случаях, при уравнивании геодезических и маркшейдерских построений сравнительно малой точности, применяют несколько упрощенные способы уравнивания. Например, в любом полигонометрическом ходе число избыточных измерений всегда равно трем. Очевидно, что число избыточных измерений практически намного меньше необходимых. Это приводит к тому, что при уравнивании не будет получено заметное повышение точности. Для одиночных полигонометрических ходов и даже для систем полигонометрических ходов с одной или двумя узловыми точками можно рекомендовать способ раздельного уравнивания. В полигонометрических сетях малой точности, содержащих не более 3-4 узловых пунктов, используют способ эквивалентной замены. Если полигонометрическая или нивелирная сеть содержит большое число исходных пунктов, то наиболее эффективно применять способ последовательных приближений. Нивелирные сети, состоящие из полигонов, при пониженных требованиях точности уравнивают, как правило, способом полигонов В.В.Попова.
Рассмотрим в этом разделе примеры уравнивания некоторых построений указанными выше способами.
4.8.1. Примеры раздельного уравнивания
4.8.1.1. Полигонометрический ход
Этот способ Вы уже использовали при уравнивании теодолитных ходов как на практических занятиях по геодезии на 1-м курсе, так и на учебной геодезической и маркшейдерской практиках.
Суть способа заключается в следующем.
1. Уравнивают горизонтальные углы (дирекционные углы), распределяя полученную угловую невязку поровну во все углы, либо нарастающим итогом – в дирекционные углы, вычисленные по измеренным горизонтальным углам. Полученные значения дирекционных углов полагают уравненными и в дальнейшем других поправок в них уже не вводят.
2. Вычисляют по уравненным дирекционным углам и измеренным сторонам приращения координат. Невязки Wx и Wy в приращениях координат распределяют по соответствующим приращениям пропорционально длинам сторон, которые использовались для вычисления данного приращения:
![]() ;
;
![]() .
(4.224)
.
(4.224)
В качестве практического уравнивания рассмотрим полигонометрический ход примера 4.7.3 (Автор приносит извинения за отсылку вперед).
Весь процесс уравнивания приведен в табл. 4.65.
Таблица 4.65
№№ точек |
Гориз.углы β |
Дирекц.углы α |
Рассто-яния s , м |
Приращения координат, м |
Координаты, м |
№№ точек |
||
Δх |
Δу |
Х |
Y |
|||||
А |
|
|
|
Ход (1) |
|
|
|
|
137°13'16,4" |
|
|
|
|||||
В |
-0,8" 112°36'45,4"
|
8365,344 |
5240,647 |
В |
||||
69°50'01,8" |
1245,638 |
+429,431 -0,006 |
+1169,275 +0,005 |
|||||
1 |
-0,9" 213°02'16,8"
|
8794,769 |
6409,927 |
1 |
||||
102°52'18,6" |
963,017 |
-214,524 -0,005 |
+938,819 +0,003 |
|||||
2 |
-0,9" 88°44'26,7"
|
8580,240 |
7348,749 |
2 |
||||
11°36'45,3" |
1033,151 |
+1012,006 -0,005 |
+207,953 +0,004 |
|||||
С |
-0,9" 269°22'04,0" |
9592,241 |
7556,706 |
С |
||||
100°58'49,3" |
[di] 3241,806 |
[Δx] +1226,913 |
[Δy] +2316,047 |
|||||
D |
|
|
|
|
||||
|
|
Исходный 100°58'45,8" |
|
[Δx](теор) +1226,897 |
[Δy](теор) +2316,059 |
|
|
|
|
|
Wβ = +3,5"
|
|
Wx +0,016 |
Wy -0,012 |
|
|
|
Пояснения к расчетам в табл. 4.65.
1. Угловая невязка (+3,5") получена как разность вычисленного и исходного дирекционных углов конечной линии хода.
2. Поправки в углы распределены поровну с обратным невязке знаком.
3. Невязки в приращениях координат равны разности сумм приращений и разности координат конечной и начальной точек хода:
Wx = +1226,913 – (9592,241 – 8365,344) = + 0,016 м;
Wy = +2316,047 – (7556,706 – 5240,647) = - 0,012 м.
4.Окончательные значения координат точек вычислены с учетом поправок в приращения координат.
4.8.1.2. Система полигонометрических ходов с одной узловой точкой
Задача. Сгущение геодезической сети для выполнения разбивочных работ на строительной площадке шахтного ствола.
При рекогносцировке геодезической сети выявилось, что ближайшие исходные пункты находятся примерно в 2-х км от проектного центра шахтного ствола: № 1365 – пункт 2 класса, № 742 и № 751 – пункты 3 класса. Два пункта 2 класса, № 1368, видимый с пунктов № 1365 и № 742, и № 1363, видимый с пункта № 751, находятся на расстоянии примерно 12 и 8 км соответственно. На местности закреплены точки системы полигонометрических ходов 2 разряда с одной узловой точкой 3 и узловой линий 3-4 (рис. 4.16).
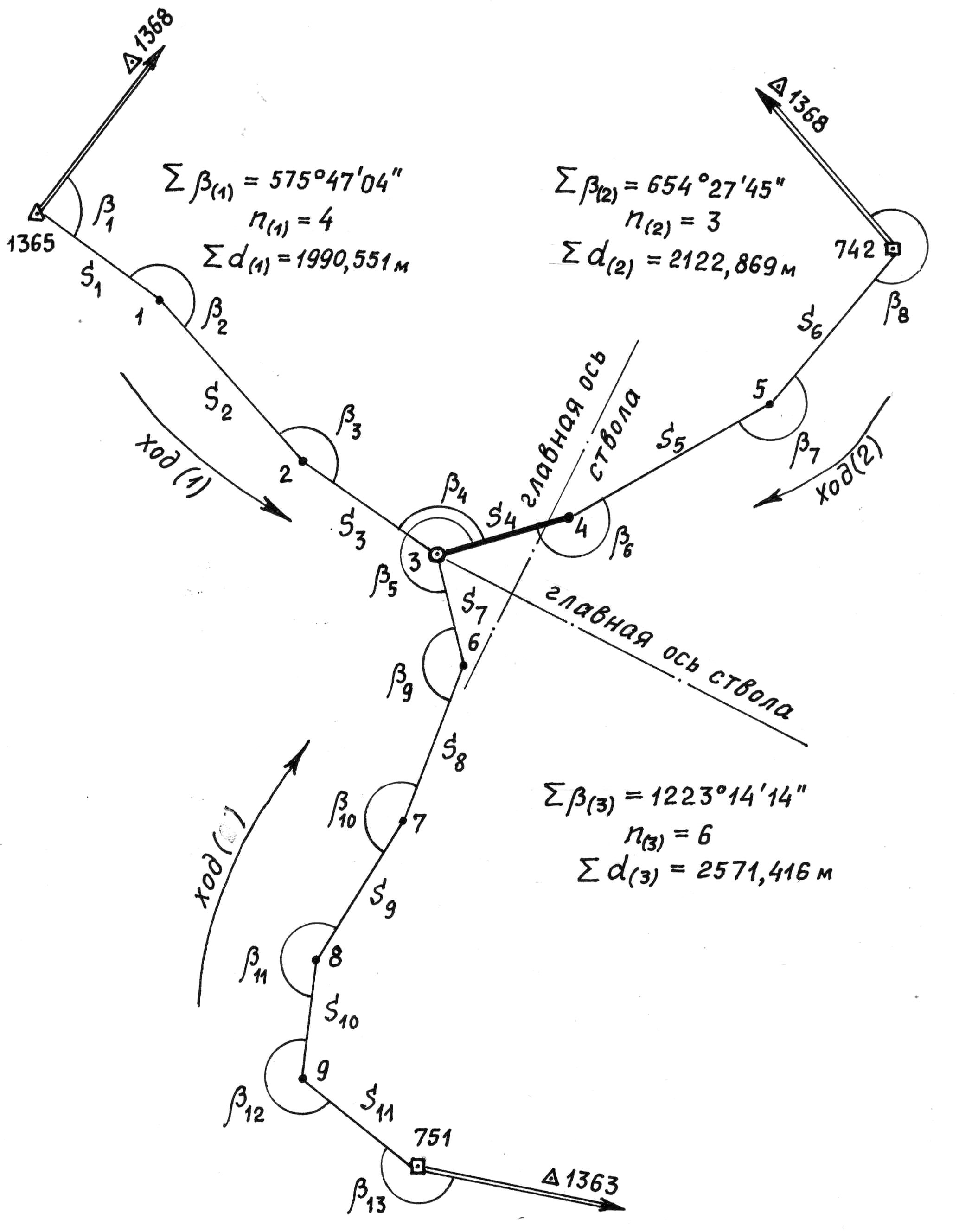
Рис. 4.16. Система полигонометрических ходов с одной узловой точкой
Координаты исходных пунктов № 1365, № 742 и № 751 и дирекционные углы исходных направлений приведены в табл. 4.66.
Таблица 4.66
Исходные данные
№№ исходных пунктов |
Х, м |
Y, м |
Обозначение дирекционного угла |
Значение дирекционного угла прямой (обратный) |
1365 |
22324,647 |
8507,422 |
α1365-1368 |
38о42'18" (218о42'18") |
742 |
21838,950 |
11724,604 |
α 742-1368 |
320о02'04" (140о02'04") |
751 |
18548,319 |
9477,758 |
α 751-1363 |
111о15'47" (291о15'47") |
Значения измеренных углов и расстояний (горизонтальных проложений) приведены в табл. 4.67.
Таблица 4.67
Результаты измерений
Ход (1) |
Ход (2) |
Ход (3) |
|||
Г о р и з о н т а л ь н ы е у г л ы |
|||||
β1 |
92о49'25" |
β 8 |
272о28'00" |
β 13 |
220о36'28" |
β 2 |
191о24'18" |
β 7 |
191о44'05" |
β 12 |
222о54'35" |
β 3 |
170о30'05" |
β 6 |
190о15'40" |
β 11 |
201о33'50" |
β 4 |
121о03'16" |
|
|
β 10 |
165о58'16" |
|
|
|
|
β 9 |
147о39'00" |
|
|
|
|
β 5 |
264о32'05" |
Р а с с т о я н и я, м |
|||||
S1 |
551,384 |
S6 |
738,949 |
S11 |
523,623 |
S2 |
859,047 |
S5 |
862,212 |
S10 |
441,504 |
S3 |
580,120 |
S4 |
521,708 |
S9 |
601,946 |
|
|
|
|
S8 |
603,005 |
|
|
|
|
S7 |
401,338 |
Решение задачи раздельного уравнивания производится с учетом весовых характеристик полигонометрических ходов: для дирекционных углов – число n углов в ходе; для координат – длина хода.
1. Вычисление вероятнейшего значения дирекционного угла узловой линии 3-4 по ходам (1), (2), (3).
Дирекционный угол узловой линии вычисляется в данном случае трижды, по каждому полигонометрическому ходу, по формуле левых (см. рис. 4.16) горизонтальных углов:
![]()
![]()
![]()
Здесь следует иметь в виду, что при вычислении по ходу (2) дирекционный угол узловой линии получится обратным. Поэтому его необходимо будет изменить на 180о.
Веса
дирекционных углов определим для единицы
веса ne
= 4 (![]() ):
):
![]() ;
;
![]() ;
;
![]() .
.
Вероятнейшее значение дирекционных углов находим по формуле среднего весового:
![]() .
.
2. Уравнивание горизонтальных углов.
Угловые невязки в каждом из полигонометрических ходов определяем по условию, что конечный дирекционный угол равен вероятнейшему значению дирекционного угла узловой линии. В соответствии с этим получим: fβ(1) = - 21" ; fβ(2) = + 6" ; fβ(3) = + 18" .
Поправки в углы распределяем поровну. Таким образом, в углы хода (1) необходимо будет внести поправки по + 5" (а в один из углов - + 6"), в углы хода (2) – по - 2", хода (3) – по - 3". Значения уравненных горизонтальных углов приведены в табл. 4.68.
Таблица 4.68
Значения уравненных горизонтальных углов
Ход (1) |
Ход (2) |
Ход (3) |
|||
У р а в н е н н ы е г о р и з о н т а л ь н ы е у г л ы |
|||||
β1 |
92о49'30" |
β 8 |
272о27'58" |
β 13 |
220о36'25" |
β 2 |
191о24'24" |
β 7 |
191о44'03" |
β 12 |
222о54'32" |
β 3 |
170о30'10" |
β 6 |
190о15'38" |
β 11 |
201о33'47" |
β 4 |
121о03'21" |
|
|
β 10 |
165о58'13" |
|
|
|
|
β 9 |
147о38'57" |
|
|
|
|
β 5 |
264о32'02" |
3. Вычисление вероятнейших значений координат узловой точки 3 по ходам (1), (2), (3).
Координаты точки 3 в каждом из полигонометрических ходов опреде-ляем по формулам прямой геодезической задачи :
![]() (4.225)
(4.225)
Вычисления с учетом уравненных значений горизонтальных углов приведены в табл. 4.69.
Примечание. Если длины сторон, образующих углы, заметно отличаются, то в горизонтальные углы, а затем и в дирекционные углы, можно вводить весовые поправки, предварительно определив веса углов.
По ходам (1), (2) и (3) вычисляем значения приращений координат и координат узловой точки 3, используя для этого значения уравненных дирекционных углов. Неуравненные значения координат точек ходов приведены в ведомости в скобках.
Определяем весовые характеристики ходов (1), (2), (3). В качестве единицы веса принимаем примерно среднюю длину хода (sе = 2000 м). Тогда
![]()
![]()
![]() .
.
Таблица 4.69
Ведомость вычисления координат
№№ точек |
Гориз.углы β |
Дирекц.углы α |
Рассто-яния s , м |
Приращения координат, м |
Координаты, м |
№№ точек |
||
Δx |
Δy |
X |
Y |
|||||
1368 |
|
|
|
Ход (1) |
|
|
|
|
218°42'18" |
|
|
|
|||||
1365 |
92°49'30"
|
22324,647 |
8507,422 |
1365 |
||||
131°31'48"
|
551,384 |
-365,574 (+0,032) |
+412,771 0,000
|
|||||
1 |
191°14'24"
|
(21959,073) 21959,105 |
(8920,193) 8920,193 |
1 |
||||
142°56'12"
|
859,047 |
-685,494 (+0,050) |
+517,745 0,000
|
|||||
2 |
170°30'10"
|
(21273,579) 21273,661 |
(9437,938) 9437,938 |
2 |
||||
133°26'22"
|
580,120 |
-398,883 (+0,034) |
+421,226 0,000 |
|||||
3 |
121°03'21"
|
(20874,696) 20874,812 |
(9859,164) 9859,164 |
3 |
||||
74°29'43"
|
[di] 1990,551 |
WX(1) -0,116
Ход (2) |
WY(1) -0,000 |
|||||
|
|
|
|
|
||||
1368 |
|
|
|
|
||||
140°02'04" |
|
|
|
|||||
742 |
272°27'58"
|
21838,950 |
11724,604 |
742 |
||||
232°30'02"
|
738,949 |
-449,838 -0,016 |
-586,252 +0,009 |
|||||
5 |
191°44'03"
|
(21389,112) 21389,096 |
(11138,352) 11138,361 |
5 |
||||
244°14'05"
|
862,212 |
-374,791 -0,019 |
-776,493 +0,0011 |
|||||
4 |
190°15'38"
|
(21014,321) 21014,286 |
10361,859) 10361,879 |
4 |
||||
254°29'43"
|
521,708 |
-139,462 -0,012 |
-502,722 +0,007 |
|||||
3 |
|
(20874,859) 20874,812 |
(9859,137) 9859,164 |
3 |
||||
|
[di] 2122,869 |
WX(2) +0,047
|
WY(2) -0,027 |
|||||
291°15'47" |
|
Ход (3) |
|
|||||
1363 |
|
|
|
|
||||
751 |
220°36'25"
|
18548,319 |
9477,758 |
751 |
||||
331°52'12"
|
523,623 |
+461,773 -0,019 |
-246,874 -0,007 |
|||||
9 |
222°54'32"
|
(19010,092) 19010,073 |
(9230,884) 9230,877 |
9 |
||||
14°46'44"
|
441,504 |
+426,898 -0,016 |
+112,623 -0,006 |
|||||
8 |
201°33'47"
|
(19436,990) 19436,955 |
(9343,507) 9343,494 |
8 |
||||
36°20'31"
|
601,946 |
+484,864 -0,022 |
+356,715 -0,008 |
|||||
7 |
165°58'13"
|
(19921,854) 19921,797 |
(9700,222) 9700,201 |
7 |
||||
22°18'44"
|
603,005 |
+557,857 -0,022 |
+228,933 -0,008 |
|||||
6 |
147°38'57"
|
(20479,711) 20479,632 |
(9929,155) 9929,126 |
6 |
||||
349°57'41"
|
401,338 |
+395,194 -0,014 |
-69,958 -0,004 |
|||||
3 |
264°32'02"
|
(20874,905) 20874,812 |
(9859,197) 9859,164 |
3 |
||||
4 |
|
74°29'43" |
[di] 2571,416 |
WX(3) +0,093 |
WY(3) +0,033 |
|
|
|
Находим вероятнейшие значения координат узловой точки 3:
![]() ;
;
![]() .
(4.226)
.
(4.226)
Получим Х3 = 20874,812 м ; Y3 = 9859,164 м.
Уравнивание координат точек полигонометрических ходов.
Вычисляем значения невязок в координатах точки 3 по формулам
![]()
![]() (4.227)
(4.227)
Полученные значения невязок в координатах приведены в табл. 4.69.
На этом этапе расчетов необходимо убедиться в качестве выполненных полевых работ. Для этого вычисляют абсолютную и относительную невязки по каждому из ходов и сравнивают их с допустимой невязкой для принятого разряда геодезического построения.
Вычисляем значения поправок в приращения координат по формулам
![]() ;
;
![]() (4.228)
(4.228)
Полученные поправки выписаны в ведомость под значениями приращений координат.
Вычисляем с учетом поправок уравненные значения координат точек ходов. Полученные уравненные значения координат записаны без скобок под предварительно вычисленными координатами.
Качество решения задачи оценивается сходимостью координат узловой точки по всем ходам. Кроме того, как это требуется при обработке аналогичных систем, производят оценку точности по ходам по относительной погрешности хода. Т.е. необходимо вычислить абсолютную и относительную погрешности и проанализировать точность работ сравнением с допуском.
Аналогично выполняется уравнивание систем полигонометрических ходов с двумя и более узловыми точками.
4.8.1.3. Система нивелирных ходов с одной узловой точкой
На рис. 4.17 представлена система нивелирных ходов с одной узловой точкой М.
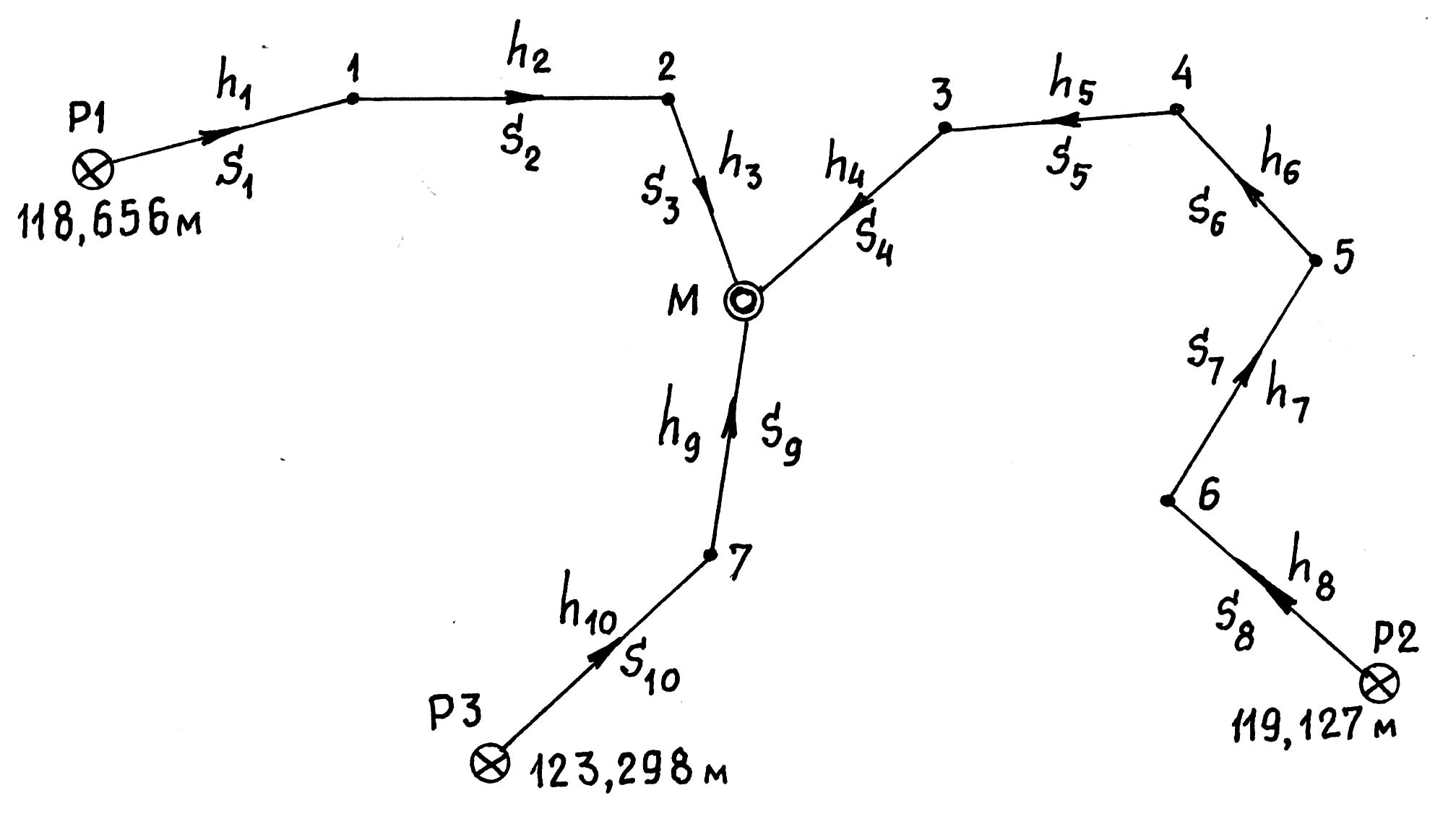
Рис. 4.17. Система нивелирных ходов с одной узловой точкой
В табл. 4.70 приведены значения превышений, длины ходов между точками (в секциях), а также весовые характеристики ходов для sе = 3 км.
Таблица 4.70
Результаты измерений
№ хода |
№№ точек |
Превышения, мм |
Длина секции и хода, км |
Вес хода |
( 1 ) |
ГР1 - 1 |
h 1 = +3256 |
1,06 |
p(1) = 0,785 |
1 - 2 |
h 2 = -1848 |
1,24 |
||
2 - М |
h 3 = +2651 |
1,52 |
||
|
|
[s(1)] = 3,82 |
||
( 2 ) |
ГР2 – 6 |
h 8 = -2033 |
1,14 |
p(2) = 0,637 |
6 - 5 |
h 7 = +1247 |
1,20 |
||
5 - 4 |
h 6 = +3916 |
0,96 |
||
4 – 3 |
h 5 = -852 |
0,84 |
||
3 - М |
h4 = +1334 |
0,57 |
||
|
|
[s(2)] = 4,71 |
||
( 3 ) |
ГР3 – 7 |
h 10 = -3211 |
0,44 |
p(3) = 2,256 |
7 - М |
h 9 = +2650 |
0,89 |
||
|
|
[s(3)] = 1,33 |
1. Трижды по ходам (1), (2) и (3) вычислить высоты узловой точки:
![]()
![]()
![]()
2. Установить единицу веса как примерно среднее арифметическое из длин ходов -
![]()
и вычислить веса ходов:
![]()
![]() ;
;
![]() .
.
3. Вычислить среднюю весовую высоту узловой точки :
![]() .
(4.229)
.
(4.229)
Для удобства следует определять среднее весовое значение изменяемой части высоты.
![]() .
.
4. Определить невязки в ходах по формуле
![]() (4.230)
(4.230)
![]()
![]()
![]()
5. Вычислить поправки в превышения в ходах с учетом длин секций в ходе по формуле
![]() ,
(4.231)
,
(4.231)
где
![]() - длина хода j
; si
– длина секции iв
ходе.
- длина хода j
; si
– длина секции iв
ходе.
Ход
(1):
![]()
Ход
(2):

Ход
(3):
![]()
Контроль: сумма поправок в превышения хода должна быть равна невязке хода с обратным знаком.
6. Далее необходимо вычислить уравненные значения превышений в ходах с учетом полученных поправок и проконтролировать правильность уравнивания вычислением трижды значений уравненной высоты узловой точки. Эти значения должны совпасть. Возможны в данном случае незначительные отклонения до 1 мм, что обусловлено округлением результатов вычислений.
Например, для хода (1):
- уравненные значения превышений: h10 = +3256 + 5 = +3261 мм; h20 = - 1848 + 6 = - 1842 мм; h30 = + 2651 + 7 = + 2658 мм;
- уравненное значение высоты узловой точки (по данному ходу):
![]()