

- •1.1. Структура технологічної бази автосервісних підприємств
- •Структура виробничо-технічної бази пат
- •1.2. Класифікація автосервісного технологічного устаткування
- •1.3. Механізація технологічних процесів то та пр на пат
- •1.4. Фактори впливу механізації на процеси то та пр
- •Контрольні запитання
- •2.1. Типи мийно-очисного обладнання підприємств автомобільного транспорту
- •2.2. Струминні мийниці
- •Для легкових автомобілів з рухливим робочим органом:
- •Технічна характеристика струминної мийниці високого тиску з нагрівом води (типу hds Super m eco)
- •2.3. Установки для мийки автомобілів с рухомим порталом
- •2.4. Гідродинаміка струминного очищення поверхонь
- •2.5. Насосні установки для мийки автомобілів
- •2.6. Насосні станції мийних установок
- •2.7. Насадки гідрантів струминних установок
- •2.8. Гідранти мийних установок
- •2.9. Струминні камерні мийні установки
- •2.10. Енергетична оцінка струминних мийних машин
- •2.11. Щіткові установки для миття автомобілів
- •2.12. Струминно-щіткові мийні установки
- •2.13. Автомобільні сушильні установки
- •2.14. Обладнання для механізованої мийки вузлів і агрегатів
- •2.15. Установки для миття деталей автомобільних агрегатів
- •2.16. Водоочисні споруди мийних установок
- •2.17. Флотаційно-мийна установка для автосервісу
- •2.18. Розрахунок очисних споруджень автомийних установок
- •2.19. Очищення деталей кісточковим дрібняком
- •2.20. Пневматичні піскоструминні установки
- •Контрольні запитання
- •3.1. Типи автосервісного підйомно-оглядового обладнання
- •3.2. Гаражні оглядові канави
- •І траншейної (в) оглядових канав
- •3.3. Естакади для огляду автомобілів
- •3.4. Гаражні домкрати
- •Значення допускаємих питомих тисків
- •3.5. Типи підйомників для обслуговування автомобілів
- •3.6. Гаражні гідравлічні підйомники для автомобілів
- •Клапани; 6 – гідророзподільник; 7 – напірний клапан; 8 – гідронасос;
- •3.7. Електромеханічні гаражні підйомники
- •Одностояковий підйомник
- •Електромеханічного підйомника
- •3.8. Електричні й гідравлічні піднімальні пристрої для спеціальних стендів
- •Для проведення слюсарних робіт
- •Під «розвал-сходження»
- •Електрогідравлічного підйомника під «розвал-сходження»
- •С додатковим підйомником
- •3.9. Колонні підйомники для вантажних автомобілів і автобусів
- •Колонних підйомників для підйому навантажувачів
- •3.10. Перекидачі для легкових автомобілів
- •Контрольні запитання
- •4.1. Типи підйомно-транспортного обладнання підприємств автомобільного транспорту
- •Підвісне підйомно-транспортне обладнання, використовуване при ремонті агрегатів автомобілів
- •Напільне підйомно-транспортне обладнання, використовуване при ремонті агрегатів автомобілів
- •4.2. Вантажопідйомні механізми
- •4.3. Розрахунок основних параметрів підйомного механізму
- •Тип і кратність поліспаста
- •Значення коефіцієнтів [Кк] та е для талі
- •4.4. Поворотні стрілові крани з зовнішніми опорами
- •4.5. Однобалкові мостові крани
- •4.6. Конвейєри для переміщення автомобілів при то та пр
- •4.7. Несучі конвейєри для переміщення автомобілів
- •Несучий на колесах, Несучий на колесах, Несучий з вивішеними
- •4.8. Тягнучі конвейєри
- •4.9. Кругові конвейєри для обслуговування автомобілів
- •4.10. Підвісні конвейєри для транспортування агрегатів
- •4.11. Розрахунок конвейєрів для переміщення автомобілів
- •4.12. Ручні візки для транспортування агрегатів автомобілів
- •Контрольні запитання
- •5.1. Типи мастильно-заправного обладнання підприємств автомобільного транспорту
- •5.2. Обладнання для заправлення маслом двигунів
- •5.3. Установка для зливу/відкачки масла
- •5.4. Установки для заправлення трансмісійним маслом
- •Установка 3161
- •5.5. Нагнітачі пластичних мастил
- •5.6. Обладнання для заправки гальмівною рідиною
- •Параметри установок для прокачування гідрогальм
- •5.7. Повітророздавальне обладнання
- •Автоматична колонка с-411
- •5.8. Автоматична повітророзподільна колонка
- •5.9. Обладнання для протикорозійної обробки
- •5.10. Обладнання станцій скрапленого нафтового газу
- •Заправочної станції скрапленого нафтового газу
- •5.11. Обладнання станцій стиснутого природного газу
- •Автомобілів стиснутим природнім газом
- •Для заправляння автомобілів стиснутим природним газом
- •Контрольні запитання
- •6.1. Пневматичні системи підприємств автосервісу
- •Стисненого повітря
- •6.2. Автосервісні компресорні установки
- •Забезпечення потреб станцій технічного обслуговування автомобілів
- •6.3. Багатоступінчасте стиснення повітря
- •І зображення процесу стиску в т, s-діаграмі (б)
- •6.4. Елементи пневматичних автосервісних систем
- •Пристрій автоматичного видалення конденсату (в)
- •Електронний пристрій автоматичного видалення конденсату (б)
- •6.5. Розрахунок пневмосистем підприємств автосервісу
- •6.6. Пневматичний інструмент роторного типу
- •6.7. Пневматичні ножиці для листового металу
- •6.8. Пневматичні інерційно-ударні гайковерти
- •6.9. Пневматичне обладнання ударного типу
- •Параметри пневматичного молотка
- •Контрольні запитання
- •7.1. Діагностичні параметри тягово-економічних властивостей
- •Діагностичні параметри автомобілів у цілому
- •7.2. Засоби технічного діагностування тягових
- •7.3. Діагностування тягово-економічних властивостей
- •Технічні характеристики стендів тягових якостей
- •Фірми «Hofmann» (Німеччина), мод. Dynatest-112
- •Технічна характеристика стендів мод. Dynatest
- •7.4. Інерційні стенди визначення тягових властивостей автомобілів
- •7.5. Будова динамічного роликового стенду моделі м-108
- •7.6. Режими функціонування роликового стенда м-108
- •7.7. Функціональні можливості стенда м-108
- •7.8. Вибір параметрів роликового блоку стенда тягових властивостей
- •Розрахунок довжини роликів і відстаней між їхніми торцями провадять за схемою (рис. 7.9).
- •Контрольні запитання
- •Розділ 8 обладнання для діагностування двигуна
- •8.1. Засоби діагностування двигунів автомобілів
- •8.2. Мотор-тестери автомобільних двигунів
- •8.3. Діагностування двигунів з комп’ютерним керуванням
- •8.4. Засоби діагностування систем живлення двигунів
- •Форсунок дизельних двигунів
- •8.5. Витратоміри палива двигунів автомобілів
- •Технічні характеристики вимірників витрати палива
- •8.6. Діагностування стану кривошипно-шатунних механізмів
- •8.7. Методи визначення викидів шкідливих речовин
- •З відпрацьованими газами автомобіля
- •8.8. Аналізатори задимленості дизельних двигунів
- •Гранично припустимі норми димності відпрацьованих газів
- •У значення коефіцієнта поглинання
- •8.9. Обладнання дільниці то і ремонту газової апаратури
- •Працюючого на скрапленому нафтовому газі
- •Та ремонту газової апаратури автомобілів
- •8.10. Методи перевірки газової апаратури
- •Контрольні запитання
- •9.1. Призначення засобів діагностування трансмісії
- •9.2. Визначення кутових зміщень в агрегатах трансмісії
- •9.3. Пристрій для контролю муфти зчеплення
- •9.4. Діагностування агрегатів трансмісії на роликових стендах
- •9.5. Віброакустичні засоби діагностування агрегатів
- •9.6. Стенди для діагностування коробок передач автомобілів
- •Для діагностування коробок передач
- •Для діагностування коробок передач
- •Синхронізаторів автомобільних коробок передач
- •9.7. Діагностування ведучих мостів автомобілів
- •Контрольні запитання
- •10.1. Призначення засобів діагностування ходової частини
- •10.2. Діагностування зазорів в ходовій частині автомобілів
- •У шкворневих з’єднаннях:
- •10.3. Обладнання для діагностування підвіски автомобілів
- •10.4. Стенди для діагностування амортизаторів на автомобілі
- •Для перевірки амортизаторів
- •10.5. Стенд контролю жорсткості шин автомобільних коліс
- •У шині без розкриття вентиля:
- •10.6. Обладнання для балансування коліс автомобілів
- •Технічні характеристики верстатів для балансування коліс, знятих з автомобіля
- •І вантажних автомобілів, мод. L-38 фірми «семв» (Італія)
- •Контрольні запитання
- •11.1. Вимірники люфтів і сил тертя в кермовому приводі
- •Регламентовані зусилля навантажувального пристрою
- •11.2. Стенди для перевірки кутів виставлення керованих коліс
- •11.3. Площадкові стенди для діагностування установки
- •Для діагностування виставлення коліс автомобілів
- •У динамічному режимі:
- •11.4. Стенди визначення кутів виставлення керованих коліс
- •Автомобіля в статичному режимі з використанням:
- •Автомобіля в статичному режимі з використанням:
- •11.5. Електронні стенди виміру кутів установки керованих коліс
- •Установлення коліс
- •Контрольні запитання
- •12.1. Методи діагностування гальм автомобілів
- •Гальм автомобілів
- •12.2. Обладнання для діагностування гальм на дорозі
- •12.3. Стенди для визначення гальмівних якостей автомобілів
- •12.4. Силові роликові стенди для діагностування гальм
- •Технічні характеристики стендів для діагностування гальм автомобілів
- •12.5. Інерційні роликові стенди для діагностування гальм
- •12.6. Функціональні якості інерційного роликового стенда
- •12.8. Вимірювання діагностичних параметрів на стендах
- •Інерційного стенда для перевірки гальм автомобілів
- •12.9. Платформні інерційні гальмівні стенди
- •12.10. Автоматизований гальмівний стенд
- •12.11. Засоби діагностування опорно-розтискної системи гальм
- •Контрольні запитання
- •13.1. Характеристика засобів діагностування
- •13.2. Обладнання типової електротехнічної дільниці пат
- •Основне технологічне обладнання електротехнічної дільниці
- •13.3. Обладнання для контролю стану акумуляторів
- •Температурні поправки до показань денсиметра
- •Та вимірювання напруги акумулятора під навантаженням (б)
- •13.4. Прилади для діагностування генераторів і стартерів
- •І реле-регуляторів:
- •13.5. Перевірка систем запалювання двигунів
- •13.6. Пристрої для перевірки контрольно-вимірювальних приладів
- •13.7. Засоби діагностування систем освітлення автомобілів
- •13.8. Обладнання для діагностування електронних систем атз
- •Використовуване при діагностиці
- •13.9. Самодіагностика електронних систем автомобілів
- •Контрольні запитання
- •14.1. Методи випробування агрегатів автомобіля
- •14.2. Навантажувальні пристрої стендів для випробувань двигунів
- •14.3. Обладнення для випробувань коробок передач автомобілів
- •14.4. Обладнання для випробувань ведучих мостів автомобілів
- •Стенда випробування мостів
- •14.5. Устаткування для випробувань карданних передач
- •Для випробувань карданних передач трансмісій автомобілів
- •Автомобілів при перемінних навантаженнях
- •14.6. Випробування ресор автомобілів
- •14.7. Випробування автомобільних амортизаторів
- •14.8. Стенди для випробувань гальмівних механізмів коліс
- •Для випробувань гальмових механізмів автомобілів
- •Контрольні запитання
- •15.1. Обладнання для технічного обслуговування шин
- •15.2. Типове оснащення шиноремонтних дільниць
- •І дільниці ремонту камер автотранспортного підприємства:
- •15.3. Стенди для демонтажу та монтажу шин автомобілів
- •Для демонтажу (монтажу) шин легкових автомобілів:
- •Вантажних автомобілів моделі ш-509:
- •Технічні характеристики шиномонтажних стендів моделей monty
- •Моделі monty: 12 se, 22 se, 32 se, pro «hofmann» (Німеччина)
- •Модель м-70 фірми «bejssbarth» (Німеччина)
- •Технічна характеристика шиномонтажного стенда моделі м-70
- •15.4. Засоби для ремонту камер автомобільних коліс
- •15.5. Борторозширювачі шин з пневматичним підйомником
- •Технічні характеристики борторозширювачів
- •15.6. Ремонт місцевих пошкоджень шини
- •Ушкоджень протекторної й бічної частини шин
- •15.7. Пристрій для накачки безкамерних шин
- •15.8. Обладнання для клеймування автомобільних шин
- •Контрольні запитання
- •16.1. Типи розбірно-складального обладнання
- •Технічна характеристика гайковертів
- •16.2. Гаражні інерційно-ударні гайковерти
- •16.3. Універсальний ключ для фланців і маточин
- •16.4. Знімач для випресування півосей заднього ведучого мосту
- •16.5. Пристосування для зняття пружин передньої підвіски
- •16.6. Обладнання для розбирання вузлів рульового керування
- •Передньої підвіски
- •16.7. Гвинтові знімачі
- •Технічна характеристика гідравлічного преса моделі 2135-1м
- •Контрольні запитання
- •17.1. Тенденції розвитку автосервісу з ремонту кузовів
- •17.2. Класична й шаблонова системи виправлення кузовів
- •17.3. Пересувні стенди для правки кузовів автомобілів
- •17.4. Контроль геометрії кузова вимірювальними пристроями
- •17.5. Обладнання ділянки ремонту кузовів автомобілів
- •17.6. Стенди для рихтування кузовів легкових автомобілів
- •Фірми celette (Франція)
- •17.7. Інструменти для виправлення деформованих ділянок кузовів
- •Для виправлення деформованих ділянок кузовів автомобілів
- •Ділянок кузовів автомобілів
- •17.8. Обладнання для гнуття та різки листового металу
- •17.9. Зварювальне обладнання для ремонту кузовів
- •17.10. Обладнання для ремонту зварюванням рам автомобілів
- •Контрольні запитання
- •18.1. Технологічний процес фарбування автомобілів
- •18.2. Інструменти для фарбування і шпатлювання
- •18.3. Устаткування з пневматичним розпиленням фарби
- •18.4. Установки для безповітряного розпилення фарб
- •Для нанесення лакофарбових матеріалів
- •18.5. Докрашування кузовів в електричному полі
- •18.6. Будова фарборозпилювачів
- •18.7. Фарбозмішувальні установки для підбору кольору
- •18.8. Будова фарбувальних камер для кузовів автомобілів
- •(Угорської фірми «Афіт»)
- •Технічні характеристикифарбувально-сушильної камери моделі sb-7427
- •18.9. Способи сушіння лакофарбових покриттів
- •18.10. Сушильні установки для частково окрашеного
- •18.11. Пости протикорозійного покриття кузова автомобіля
- •С установкою с-612
- •Для нанесення протикорозійних покриттів мод. 183м:
- •Контрольні запитання
- •19.1. Типи силових механізмів технологічного обладнання
- •19.2. Передавальні механізми гаражного устаткування
- •19.3. Кулачкові механізми автосервісного обладнання
- •19.4. Фрикційні передачі технологічного обладнання
- •Передачі
- •19.5. Черв’ячні передачі автотранспортного устаткування
- •Значення коефіцієнтів тертя f і кута тертя
- •19.6. Механізми переривчастого руху
- •З неповнозубими колесами
- •19.7. Розрахунок гвинтових силових передач
- •Контрольні запитання
- •20.1. Ручні приводи гаражного обладнання
- •Сила й швидкість руху руки робітника
- •20.2. Електромеханічні приводи технологічного
- •Трьохфазні асинхронні, короткозамкнуті двигуни серії 4а (гост 19523-74)
- •20.3. Механічні характеристики машин технологічного
- •Електричного двигуна
- •20.4. Керування параметрами електроприводів змінного струму
- •Двигуном, керованим ееп з роздільними керованим випрямлячем і інвертором
- •20.5. Рівняння руху та механічна характеристика електропривода
- •20.6. Гідравлічні приводи технологічного обладнання
- •Технічні характеристики роторних насосів
- •Основні параметри гідроциліндрів
- •20.7. Розрахунок основних параметрів об’ємного гідроприводу
- •Відношення між довжиною ходу s штока і діаметром гідроциліндра d
- •20.8. Пневматичні приводи технологічного обладнання
- •Пневматичний привід
- •20.9. Комбіновані приводи гаражного обладнання
- •Контрольні запитання
- •21.1. Аналіз оснащеності підприємства технологічним
- •Перелік основного технологічного устаткування із зазначенням ланковості
- •21.2. Критерії вибору технологічного обладнання
- •Оптимальні рівні механізації для підприємств автомобільного транспорту середньої потужності
- •21.3. Вибір і складання табеля необхідного обладнання
- •21.4. Розрахунок кількості необхідного технологічного обладнання
- •21.5. Оцінка технічного рівня устаткування
- •Контрольні запитання
- •Література
- •Технологічні нормативи
- •Ефективні річні фонди часу роботи технологічного обладнання і робочих постів то та пр
- •Коефіцієнти завантаження основного технологічного обладнання автопідприємств
- •Значення коефіцієнтів нерівномірності завантаження постів
- •Видавництво
- •Харківського національного автомобільно-дорожнього університету
- •Видавництво хнаду, 61200, Харків-мсп, вул. Петровського, 25.
- •Тел. /факс: (057)700-38-72; 707-37-03, e-mail: rio@khadi.Kharkov.Ua
20.3. Механічні характеристики машин технологічного
обладнання
Рушійні сили та сили корисного опору залежно від їх механічних, фізичних і технологічних характеристик можуть бути або сталими, або функціями різних кінематичних параметрів (переміщень, швидкостей, прискорень і часу). Наприклад, у машинному агрегаті з двигуном внутрішнього згорання і поршневим насосом рушійні сили й сили виробничих опорів залежать від положення ведучих ланок. Для машинного агрегату, який складається з поршневого двигуна і генератора електричного струму, рушійна сила є функцією положення ведучої ланки, а сила корисного опору – функцією кутової швидкості вала генератора.
Рушійні сили й сили опору, як правило, визначають експериментальним шляхом, застосовуючи відповідні прилади. Здобуті дані відображають у вигляді аналітичних залежностей або діаграм сил, робіт чи потужностей. Ці функціональні залежності мають назву механічних характеристик.
Розглянемо механічні характеристики деяких машин – двигунів і робочих машин. На рис. 20.4 показано механічну характеристику асинхронного електричного двигуна трифазного струму. Така характеристика складається з двох частин: висхідної, нестійкої, розташованої ліворуч Mmax (a–b); низхідної, стійкої, розташованої праворучMmax (b–c).При деякому значенні кутової швидкості, яка відповідає номінальному моментуMномдвигуна і номінальній швидкостіном, двигун розвиває максимальну потужністьN.
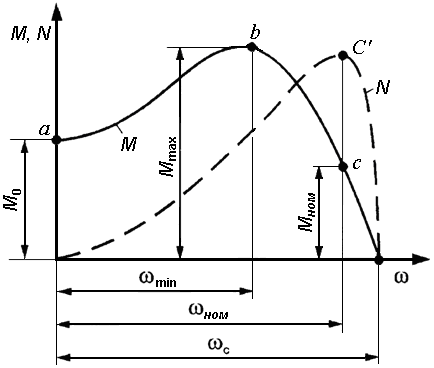
Рис. 20.4. Механічна характеристика асинхронного
Електричного двигуна
На рис. 20.4 залежність N =N () наведена штриховою лінією. Такий графік будується на основі залежностіM() за допомогою відомого співвідношення
N=M. (20.9)
Залежності N() також вважають механічними характеристиками машин.
Кутову швидкість с, при якійM= 0, називаютьсинхронною; з цією швидкістю ротор двигуна обертається під час холостого ходу. ТочкаbдіаграмиMр() визначає положення максимального перекидного моментуMmaxта мінімальної допустимої кутової швидкостіminробочої частини характеристики, а точкаавизначає початковий пусковий моментМ0при= 0. Умови роботи асинхронних електродвигунів при низьких швидкостях обертання значно погіршуються.
На рис. 20.5 показано механічні характеристики електродвигунів постійного струму з паралельним (рис. 20.5, а) і послідовним (рис. 20.5,б) збудженням.
У першому випадку Mр() змінюється лінійно, у другому – за більш складним законом. КривіN() мають параболічний характер.
а б
Рис. 20.5. Механічні характеристики електродвигунів постійного струму: а – з паралельним збудженням; б – з послідовним
Імпульсне регулювання струму збудження та відповідно магнітного потоку двигунів постійного току незалежного збудження реалізується в схемі, наведеній на рис. 20.6. У цій схемі в ланцюг обмотки збудження ввімкнені додатковий резистор R і ключК. Відносна тривалість імпульсу γτ, що відповідає відкритому стану ключа, може регулюватися в межах від 0 до 1.

Рис. 20.6. Схема двопозиційного керування опором у ланцюгу збудження
Характерною рисою імпульсних регульованих електроприводів є простота та надійність їхніх схем, обумовлена малим числом елементів.
Показники якості регулювання швидкості при використанні імпульсної модуляції не поступаються показникам при використанні безперервних сигналів. Застосування імпульсної форми носія інформативних параметрів дозволяє істотно збільшити потужність в імпульсі при невеликій середній потужності й тим самим значно підвищити завадостійкість.