

- •Оглавление
- •Предисловие к тому
- •Список используемых сокращений
- •Раздел 1. ФИЗИЧЕСКИЕ УСЛОВИЯ КОСМИЧЕСКОГО ПОЛЕТА
- •Глава 1.1 Время и системы координат
- •1.1.1. Время
- •1.1.2. Системы координат
- •1.1.3. Преобразования между системами координат
- •Глава 1.2. Солнечная система
- •1.2.1. Солнце
- •1.2.2. Планеты
- •1.2.3. Спутники и кольца планет
- •1.2.4. Астероиды и карликовые планеты
- •1.2.5. Объекты пояса Койпера. Кометы
- •Глава 1.3. Физические особенности Земли
- •1.3.1. Гравитационное поле и фигура Земли
- •1.3.2. Атмосфера Земли
- •1.3.3. Магнитное поле Земли
- •1.3.4. Корпускулярная радиация в околоземном космическом пространстве
- •1.3.5. Космический мусор и его характеристики
- •Раздел 2. МЕХАНИКА ПОЛЕТА
- •2.1.1. Способы выведения космических аппаратов на орбиту
- •Глава 2.2. Орбитальное движение
- •2.2.1. Невозмущенное орбитальное движение
- •2.2.1.1. Задача двух тел
- •2.2.1.2. Интегралы и уравнение Кеплера
- •2.2.1.3. Орбитальные элементы
- •2.2.1.4. Определение орбит в задаче двух тел
- •2.2.2. Возмущенное орбитальное движение
- •2.2.2.2. Влияние сжатия и атмосферы Земли на движение ИСЗ
- •2.2.2.3. Баллистические модели движения ИСЗ
- •2.2.4. Баллистические условия полета КА
- •2.2.5. Особые орбиты искусственных спутников Земли
- •2.2.5.1. Геостационарные орбиты
- •2.2.5.6. Критическое наклонение и орбиты типа «Молния»
- •Глава 2.3. Межорбитальные перелеты космических аппаратов
- •2.3.1. Понятие космического перелета. Перелет с конечной тягой, импульсный перелет
- •2.3.2. Реактивная сила. Формула Циолковского
- •2.3.4. Необходимые условия оптимальности перелета
- •2.3.5. Случай центрального ньютоновского гравитационного поля
- •2.3.6. Некоторые импульсные перелеты
- •2.3.7. Перелеты между околокруговыми орбитами
- •2.3.8. Оптимальные перелеты с конечной тягой
- •2.4.1. Управление геостационарной орбитой
- •2.4.2. Поддержание высокоэллиптических орбит
- •2.4.3. Поддержание высотного профиля полета Международной космической станции
- •2.4.4. Поддержание солнечной синхронности круговой орбиты
- •2.4.5. Поддержание стабильности местного времени прохождения восходящего узла круговой ССО
- •2.4.6. Управление высотой и трассой низкой круговой орбиты
- •2.4.7. Разведение спутников на круговой орбите
- •Глава 2.5. Спутниковые системы
- •2.5.1. Спутниковые системы и их баллистическое проектирование
- •2.5.2. Спутниковые системы непрерывного зонального обзора на круговых орбитах
- •2.5.2.1. Спутниковые системы на основе полос непрерывного обзора
- •2.5.2.2. Кинематически правильные спутниковые системы
- •2.5.3. Спутниковые системы периодического зонального обзора на круговых орбитах
- •2.5.3.1. Предпосылки создания современной теории периодического обзора
- •2.5.3.2. Регулярные спутниковые системы
- •2.5.3.3. Элементы маршрутной теории оптимизации спутниковых систем периодического обзора
- •2.5.3.4. Некоторые закономерности оптимальных решений
- •2.5.4. Спутниковые системы непрерывного локального обзора на эллиптических орбитах
- •2.5.5. Управление спутниковыми системами на круговых орбитах
- •Глава 2.6. Лунные и межпланетные траектории
- •2.6.1. Лунные траектории космических аппаратов
- •2.6.2. Траектории полета к планетам, астероидам, кометам
- •Глава 3.1. Типы (классификация) аэродинамических компоновок
- •3.1.3. Многоблочные компоновки с продольным разделением ступеней
- •3.1.4. Многоблочные компоновки с продольным делением ступеней и навесными полезными грузами
- •3.1.5. Выступающие и отделяемые элементы конструкции
- •3.3.1. Экспериментальные методы исследований
- •3.3.3. Аналоговые испытания
- •3.3.4. Численные методы расчета аэродинамических характеристик ракет
- •3.4.1. Ветровое воздействие на ракету при старте и транспортировании. Влияние стартовых сооружений и транспортировочных агрегатов
- •3.4.2. Ветровые нагрузки вблизи земли
- •3.4.3. Местные нагрузки при обтекании стационарным потоком
- •3.4.4. Распределенные аэродинамические нагрузки
- •3.4.5. Статическая устойчивость
- •3.4.6. Аэродинамические характеристики стабилизирующих устройств
- •3.4.8. Разделение ступеней ракет
- •3.4.9. Круговые аэродинамические характеристики тел вращения
- •3.4.11. Аэродинамическое воздействие на полезный груз в процессе отделения створок головных обтекателей
- •3.4.12. Аэродинамика отделяемых ступеней и элементов конструкции. Зоны падения (отчуждения)
- •3.5.3. Влияние струй двигателей на аэродинамические характеристики
- •3.5.4. Аэродинамическое нагружение выступающих элементов конструкции. Методы снижения нагрузок
- •3.5.5. Аэродинамические характеристики блоков многоблочных ракет в процессе их отделения
- •3.6.4. Дренирование элементов конструкции
- •3.6.5. Авиационное транспортирование
- •Глава 3.7. Термостатирование отсеков ракет при наземной подготовке
- •3.7.1. Задачи термостатирования. Ограничения. Методы решения
- •3.8.2. Классификация пусковых установок по их конструктивным схемам
- •3.8.4. Особенности тепловых процессов при старте
- •Глава 3.10. Собственная атмосфера космических аппаратов и ее влияние на функционирование приборов и систем
- •3.10.1. Экспериментальные исследования собственной внешней атмосферы космических аппаратов и станций
- •3.10.2. Особенности изменения давления в негерметичных отсеках геостационарных спутников
- •Глава 3.11. Загрязнение поверхностей космических аппаратов и методы его уменьшения
- •3.11.1. Источники загрязнения космических аппаратов
- •Глава 3.12. Аэрогазодинамика спускаемых аппаратов
- •3.13.2. Метеороиды
- •3.13.3. Космический мусор
- •3.13.4. Расчет вероятности непробоя КА метеороидами и техногенными частицами
- •3.13.5. Воздействия микрометеороидов и техногенных частиц на поверхность космического аппарата
- •3.14.2. Акустика и пульсации давления при старте ракет
- •3.14.3. Аэроакустические воздействия на ракеты в полете
- •3.14.4. Акустические воздействия на космические аппараты при наземной подготовке и в полете
- •4.2.1. Цели классификации
- •4.2.3. Систематическая классификация
- •Глава 4.3. Создание космических комплексов
- •4.3.2. Принципы обеспечения качества и надежности
- •4.3.3. Порядок создания космических комплексов
- •5.1.1. Теоретические основы проектирования летательных аппаратов
- •5.2.2. Схема многоуровневого исследования модернизации ракетного комплекса. Состав задач и математические модели
- •5.2.4. Задача оптимизации параметров модификаций ЛА. Математическая модель
- •5.2.6. Исследование эффективности модернизации РК
- •5.2.7. Анализ модификации ЛА с РДТТ при наличии неконтролируемых факторов
- •5.3.3. Проектирование топливных баков
- •5.3.4. Цилиндрические оболочки
- •Глава 5.5. Модели и методы исследования устойчивости и управляемости баллистических ракет
- •5.5.3. Исследование устойчивости продольных колебаний БР
- •Раздел 6. СРЕДСТВА ВЫВЕДЕНИЯ
- •Глава 6.1. Общая концепция
- •6.2.3 Ракеты носители «Циклон», «Зенит», «Зенит 3 SL»
- •6.3.3. МТКС «Спейс Шаттл»
- •Глава 6.4. Разгонные блоки
- •6.4.1. Разгонные блоки типа ДМ
- •6.4.2. Разгонные блоки типа «Бриз»
- •6.4.3. Разгонные блоки типа «Фрегат»
- •Глава 7.1. Жидкостные ракетные двигатели
- •7.1.1. Принципиальная схема ЖРД
- •7.1.3.1. Запуск
- •7.1.3.2. Работа ЖРД в полете
- •7.1.3.3. Автоматика ЖРД
- •7.1.3.4. Обеспечение устойчивой работы
- •7.1.4. Камера
- •7.1.4.1. Газодинамический расчет
- •7.1.4.2. Профилирование камеры
- •7.1.4.3. Тепловой расчет камеры
- •7.1.4.4. Конструирование камеры
- •7.1.4.5. Изготовление камеры
- •7.1.5. Газогенератор
- •Глава 7.2. Стендовые испытания двигательных установок
- •7.2.1. Задача отработки
- •7.2.2. Методика экспериментальной отработки жидкостных ракетных двигательных установок
- •7.2.4. Комплексные испытания пневмогидравлических систем и двигательных установок
- •Глава 8.1. Системы управления средств выведения
- •8.1.1. Назначение и область применения системы управления средств выведения
- •8.1.3. Функциональная структура и приборный состав систем управления средств выведения
- •8.1.4. Бортовой вычислительный комплекс и взаимодействие смежных систем
- •8.1.5. Навигация и наведение. Терминальное управление
- •8.1.6. Точность управления выведением полезного груза
- •8.1.7. Этапы развития систем управления средств выведения
- •8.1.9. Надежность и стойкость систем управления к помехам
- •8.1.10. Организация и обработка потоков информации о работе систем управления
- •8.1.11. Тенденция развития систем управления средств выведения
- •8.2.1. Бортовая аппаратура системы управления
- •8.2.2. Бортовое программное обеспечение
- •8.2.4. Наземная аппаратура системы управления
- •Глава 8.3. Системы разделения
- •8.3.1. Требования к системам разделения
- •8.3.2. Основные типы систем разделения
- •8.3.3. Исполнительные элементы систем разделения
- •8.3.4. Силы, действующие на разделяемые тела
- •8.3.5. Расчет систем разделения
- •8.3.6. Экспериментальная отработка систем разделения
- •8.3.7. Расчет надежности
- •8.5.1. Система одновременного опорожнения баков
- •8.5.2. Потребное давление наддува баков
- •Глава 8.6. Управление двигательной установкой
- •Глава 8.7. Исполнительные органы
- •Глава 8.8. Исполнительные приводы систем управления
Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
ОПТИМАЛЬНЫЕ ПЕРЕЛЕТЫ С КОНЕЧНОЙ ТЯГОЙ |
151 |
|
|
При численном интегрировании учиты ваются влияние нецентральности гравитаци онного поля, атмосферы, светового давления и т.д., моделируется работа двигателей КА. Хотя параметры маневров находятся на каж дой итерации с использованием простейшей модели движения, но в результате итерацион ной процедуры они обеспечивают выход на конечную орбиту с требуемой точностью.
Данная итерационная схема позволяет получать точное решение задачи, когда откло нения начальной и конечной орбит от опор ной круговой достигают нескольких сотен ки лометров, а протяженность каждого из манев ров составляет два три десятка градусов по ар гументу широты.
СПИСОК ЛИТЕРАТУРЫ
1.Ильин В.А., Кузмак Г.Е. Оптимальные перелеты космических аппаратов с двигателя ми большой тяги. М.: Наука, 1976. 744 с.
2.Бушуев Е.И., Красовский А.А. О геомет рическом решении задачи импульсного пере хода между близкими почти круговыми орби тами // Космические исследования. 1969. Т. 7, вып. 4. С. 485–489.
3.Edelbaum T.N. Minimum Impulse Trans fer in the Vicinity of a Circular Orbit // Journal of Astronautical Siciences. 1967. V. 14, No. 2. P. 66– 73.
4.Баранов А.А. Численно аналитическое определение параметров маневра многовитко вой встречи КА на близких околокруговых не
компланарных орбита |
Космические иссле |
дования. 2008. Т. 46, |
5. С. 430–439. |
5. Баранов А.А. |
геометрическом реше |
нии задачи встречи |
х почти круговых |
компланарных орбитах // Космические иссле дования. 1989. Т. 27, вып.6. C. 808–816.
6. Баранов А.А., Терехова Е.О. Оптималь ная четырехимпульсная встреча на компланар ных почти круговых орбитах // Космические исследования. 1995. Т. 33, вып 4. С. 420–495.
7. Бажинов И.К., Гаврилов В.П., Обу хов Е.В. и др. Навигационное обеспечение по лета орбитального комплекса «Салют 6»–«Со юз»–«Прогресс». М.: Наука, 1985. 375 с.
8.Баранов А.А. Алгоритм расчета пара метров многовитковых маневров дальнего на ведения // Космические исследования. 1990.
Т.28, вып. 1. C. 69–76.
9.Marec J. P. Optimal Space Trajectories. Studies in Astronautics. Elsevier Sci. Pub. Co. Amsterdam–Oxford–New York. 1979. V. 1. 329 p.
10.Баранов А.А. Методика расчета пара метров встречи КА с орбитальной станцией: препринт ИПМ РАН им. М.В. Келдыша. 2008.
№6. 32 с.
11.Баранов А.А., Баранов А.А. Алгоритм расчета параметров маневров формирования спутниковых систем // Космические исследова ния. 2009. Т. 47, вып. 3. C. 256–262.
2.3.8.ОПТИМАЛЬНЫЕ ПЕРЕЛЕТЫ
СКОНЕЧНОЙ ТЯГОЙ
Существуют различные методы определе ния оптимального перелета с тягой. Это одна из основных задач теории оптималь ного управления ([1–10]; [3, 5, 9] п. 2.3.4; [5, 8]
п.2.3.5).
Вметодах оптимизации перелетов можно выделить три группы:
1) Прямые методы оптимизации. Непо средственно варьируется траектория или управление, чтобы уменьшить минимизируе мый функционал при удовлетворении задан ных ограничений. Это наиболее распростра ненные методы оптимизации. Здесь может быть использована, в частности, конечномер ная аппроксимация управляемого движения КА, тогда общая задача оптимизации переле та сводится к задаче нелинейного программи рования [6].
2) Непрямые методы. Методы определе ния оптимального перелета, основанные на поиске траектории, удовлетворяющей необхо димым условиям оптимальности. Это непря мые методы. Хотя они и сложнее в практиче ском применении, но обладают тем преиму ществом, что позволяют получить точные оп тимальные решения и управление. Система необходимых условий оптимальности полна — вместе с начальными условиями, уравнениями движения и ограничениями она образует пол ную систему для определения неизвестных па раметров управления.
Рассмотрим случай перелета из точки в
точку с N активными участками на интервалах времени ti + t + ti , причем t1 t0 , tN t f , и с N1
точками выхода на ограничения в моменты tj при Α(tj) 6 0. В качестве неизвестных парамет ров, определяющих траекторию, можно взять в качестве примера 6 2N1 следующих пара
метров: r(t0) Λ r0, V(t0) Λ V0, моменты tj вы хода на ограничения и скачки Α(tj) (1 5 j 5 N1).
Им соответствуют 6 2N1 условий — шесть конечных условий r(tf) rf; V(tf) Vf, и 2N1 ус

Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
152 |
Глава 2.3. МЕЖОРБИТАЛЬНЫЕ ПЕРЕЛЕТЫ КА |
|
|
ловий для точек контакта с |
ограничения |
ми на расстояния до планет |
j (tj) j min, |
d j (tj) /dt 0. |
|
В силу полноты системы НУО их можно взять за основу для численного определения оптимального перелета с конечной тягой по строением соответствующей краевой задачи. Практически данную краевую задачу успешно решают при наличии достаточно хорошего на чального приближения. Для этого используют, например, параметры оптимального импульс ного перелета для той же задачи ([4] п. 2.3.6) или некоторой траектории перелета с конеч ной тягой, относительно которой есть предпо ложение или известно, что она близка к опти мальной, или параметры решения в некоторой упрощенной постановке.
Оптимальный перелет определяется по строением семейства оптимальных перелетов, если известна хотя бы одна траектория этого семейства, например, при специальных пара метрах задачи. Так, можно за начальную тра екторию семейства взять оптимальную им пульсную траекторию перелета и построить семейство оптимальных перелетов, парамет ром которого является величина, обратная максимальной тяге 1 /Pmax и равная нулю для импульсного перелета ([8] п. 2.3.4, [8] п. 2.3.5).
Условия оптимальности можно также ис пользовать для выполнения аналитического исследования задачи оптимального перелета. Иногда такой анализ позволяет решить анали тически часть задачи, выявить ее качественные особенности, упростить ее, свести к задаче с несколькими параметрами, чтобы далее ре шать ее численно.
Применяются также методы, основанные на достаточных условиях оптимальности.
На основе этих подходов получены ре зультаты исследования оптимальных переле тов с конечной тягой, например, в задачах вы ведения КА ИСЗ ([2]; [2] п. 2.3.5), ухода с круговой орбиты ([8] п. 2.3.4), перелета между компланарными и некомпланарными круговыми орбитами ([7] п. 2.3.6; [8] п. 2.3.5), перелета между близкими околокруговыми ор битами в линейной постановке ([8, 9] п. 2.3.4, [8, 9] п. 2.3.7).
3. Методы аппроксимации импульсного решения управлением с конечной тягой с воз можной последующей оптимизацией на осно ве первых двух групп методов. Эту задачу ино гда называют обратной задачей импульсной аппроксимации.
Важнейшим элементом здесь является ап проксимация одного импульса активной дугой траектории с конечной тягой ([3]; [5, 8] п. 2.3.5; [8] п. 2.3.4; [6] п. 2.3.6). Построены приближен ные методы оптимальной аппроксимации ([8] п. 2.3.4). Здесь возможны два случая:
1. Каждый импульс — внутренний по времени, тогда аппроксимирующий его актив ный участок строится таким образом:
расход массы mi i го активного участка и i го импульса один и тот же;
ориентация вектора тяги на активном участке совпадает с ориентацией импульса скорости;
для небольшого импульса ( mi + 0,6mi ) се редина i го активного участка совпадает с точ
кой приложения i го импульса ti. В общем слу
чае для этой точки m(ti ) mi / ln(1 mi / mi ). Здесь mi — масса в начале сообщения i го им
пульса и активного участка.
В этом случае построенная траектория с конечной тягой имеет ту же характеристиче скую скорость, что и импульсная, но она не
точно удовлетворяет краевым условиям: ошиб
ка составит ~8( ti /Ti)2, где Ti 2 ri3 /2/ .1g/2 — период обращения для круговой орбиты, про
ходящей через точку приложения данного им
пульса; ti — продолжительность i го активно го участка, ti − (mi / ms c) Vi (mi / P) Vi , где
P — тяга двигателя.
2. Хотя бы один из концевых импульсовV1, VN сообщается в фиксированной точке пространства с возможной односторонней ва риацией. Это, например, начальный импульс скорости, сообщаемый в точке M0 на внутрен ней границе r rmin, для перехода типа II I ([7] п. 2.3.4; [2, 4, 5] п. 2.3.5). В этом случае актив ный участок, аппроксимирующий импульс скорости, строится по тем же правилам, что и в первом случае, кроме последнего пункта — теперь активный участок примыкает к соот ветствующей концевой точке траектории. Краевые условия будут выполняться с точно
стью ~( t1 /T1 tN /TN).
Варьируя затем параметры активного уча стка, можно точно выполнить краевые усло вия и далее оптимизировать перелет. В частно сти, постоянную ориентацию тяги можно улучшить, используя линейный закон. Харак теристическая скорость при конечной тяге бу дет, как правило, больше, чем для импульсно го случая, ибо на протяженном активном уча стке обычно не удается реализовать абсолютно оптимальные параметры управления, свойст

Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
ОПТИМАЛЬНЫЕ ПЕРЕЛЕТЫ С КОНЕЧНОЙ ТЯГОЙ |
153 |
|
|
венные импульсам. Это увеличение характери стической скорости w называют гравитацион ными потерями.
В первом случае (внутреннего по времени импульса) оно приближенно оценивается ве личиной ([3, 8]; [5] п. 2.3.5; [6] п. 2.3.6)
wi / Vi − ( 2/6)( ti /Ti)2(1 3 cos2 i)
O( t |
/T )3, |
(2.3.117) |
i |
i |
|
где i — угол наклона импульса к радиус век тору.
Во втором случае (концевого импульса) увеличение характеристической скорости оце нивается приближенно величиной ([6] п. 2.3.6; [4] в п. 2.3.5; [8] п. 2.3.4):
wi / Vi − ki ti /Ti, i 1, N, |
(2.3.118) |
где коэффициент ki зависит от характеристик траектории в данной точке.
Из (2.3.117) следует, что для внутреннего импульса гравитационные потери примерно пропорциональны кубу величины импульса скорости ([8] п. 2.3.5):
w |
i |
− k |
V |
3 ; k |
g2 |
/ (24a2 V 2), |
(2.3.119) |
|
1i |
i |
1i |
i |
0i i |
|
где gi, Vi — соответственно гравитационное ускорение и скорость на круговой орбите, проходящей через точку приложения данного импульса; a0i — начальное реактивное уско рение. Поэтому эти потери резко убывают с уменьшением величины каждого импульса скорости.
Пусть маневр осуществляется в кепле ровском поле, причем перелета не ог раничено, а оскулирующие орбиты, соответ ствующие сообщению импульса скоростиVi , эллиптические и допустимые, т.е. не на
рушают ограничений. Этот случай представ лен на рис. 2.3.24, где T (wi(1)), T (w ), T (wi( 2)) —
оскулирующие орбиты в начале, внутри и в конце процесса приложения импульса. Та кой вариант имеет место, например, для им пульсов двухимпульсного перехода Гома на–Цандера или трехимпульсного перехода Штернфельда типа I I между круговыми ор битами, удовлетворяющими заданным огра ничениям на расстояние до планеты. В дан ном случае импульс скорости Vi можно реа лизовать в виде последовательности не скольких (например, двух) меньших импуль сов («субимпульсов»), прикладываемых друг за другом в одном направлении, в той же
Рис. 2.3.24. Схема дробления импульса и введе ния промежуточного пассивного витка в траек торию перелета между орбитами
точке траектории через виток соответствую щей, разделяющей соседние «субимпульсы», оскулирующей орбиты T (w ), и с той же сум мой величин импульсов, что и величина ис ходного импульса. Это означает, в частно сти, что в качестве аргумента процесса мож но вместо времени взять массу точки или ее характеристическую скорость w, а перемен ных — элементы орбиты ([1, 7, 9] в п. 2.3.4). Если такую многоимпульсную схему аппрок симировать конечной тягой, то гравитацион ные потери будут существенно уменьшены по сравнению с исходной схемой (~ в 4 раза при разбиении одного импульса на два «суб импульса»).
Для перелета c низкой околоземной кру говой орбиты высотой 400 км на геостацио нарную орбиту на рис. 2.3.25 дана зависимость характеристической скорости от начального реактивного ускорения и числа включений двигателя в перигее [10] ([8] в п. 2.3.5). У каж дой кривой в соответствующих точках указано также время перелета в часах.
Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
154 |
Глава 2.3. МЕЖОРБИТАЛЬНЫЕ ПЕРЕЛЕТЫ КА |
|
|
Рис. 2.3.25. Зависимость характеристической скоро сти перелета на геостационарную орбиту от началь ного реактивного ускорения и числа включений
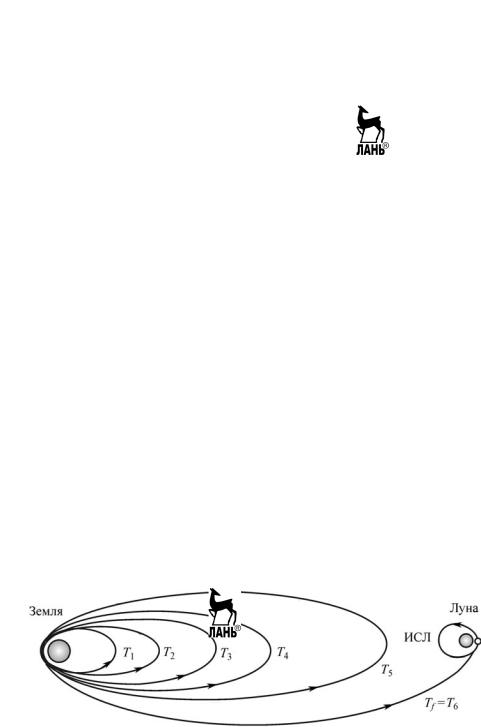
Такое разбиение импульса применяется сейчас при разгоне КА с низкой орбиты. Для примера на рис. 2.3.26 приведена схема разго на к Луне с Земли для индийского КА Сhan drayaan 1 [11], осуществленного в октябре–но ябре 2008 г. Сначала КА выводится на первую промежуточную орбиту Т1 с высотами в пери гее и апогее H 255 км и H 22 860 км, пе риодом Р1 − 6,7 ч (по этой орбите делается че тыре оборота).
В течение примерно двух недель с помо щью пяти включений двигателя КА с тягой 440 Н (при начальной массе КА 1 380 кг) и дви жении по четырем промежуточным орбитам Т2, Т3, Т4, Т5 осуществлен перелет с орбиты Т1 на конечную орбиту перелета к Луне Тf T6.
Для орбиты T2:
H 305 км и H 37900 км, орбиталь ный период Р2 − 11 ч, по ней делается два обо рота.
Для орбиты T3:
H 336 км и H 74 715 км, Р3 − − 25,5 ч.
Для орбиты T4: |
|
H 348 км и H 164600 км, Р4 − 73 ч. |
|
Для орбиты T5: |
|
H 465 км |
и H 267000 км, Р5 − |
− 6 сут. |
|
По орбитам |
, T4, T5 совершается по |
одному |
обороту. |
Для орбиты |
: |
H380 тыс. км, по ней КА движется
кЛуне ~4,5 сут.
После торможения у Луны КА пере веден с этой орбиты на орбиту ИСЛ с вы сотами в переселении и апоселении H 504 км и H 7502 км.
Может быть ситуация, когда при со общении лишь части импульса скорости допустимы оскулирующие орбиты. На рис. 2.3.27 представлен этот случай. Здесь на начальной части импульса при
wi(1) + w + wi* оскулирующая орбита пересекает внутреннюю границу, для нее перицентриче ское расстояние r (w) + rmin. В этом случае нельзя дробить импульс. На заключительной части импульса при wi* 5 w 5 wi( 2), оскулирую
щая орбита допустима, для нее r (w) rmin, можно дробить импульс и реализовать перелет
с несколькими активными участками.
Такой вариант имеет место, например, в двухимпульсном перелете типа II I с орбиты T0 типа II, пересекающей внутреннюю грани цу, на орбиту Tf типа I, не пересекающую
границ, при rmin 5 r 0 + r f, r 0 + rmin + r f, с со общением первого импульса в начальной точ
ке M0 на внутренней границе , (r rmin) и второго импульса в апоцентре f конечной
орбиты ([7] п. 2.3.4, [4] п. 2.3.5). Первый им пульс нельзя дробить, для него r (w) + rmin, он аппоксимируется одним активным участ
Рис. 2.3.26. Схема разгона к Луне индийского КА Сhandrayaan 1