

- •Оглавление
- •Предисловие к тому
- •Список используемых сокращений
- •Раздел 1. ФИЗИЧЕСКИЕ УСЛОВИЯ КОСМИЧЕСКОГО ПОЛЕТА
- •Глава 1.1 Время и системы координат
- •1.1.1. Время
- •1.1.2. Системы координат
- •1.1.3. Преобразования между системами координат
- •Глава 1.2. Солнечная система
- •1.2.1. Солнце
- •1.2.2. Планеты
- •1.2.3. Спутники и кольца планет
- •1.2.4. Астероиды и карликовые планеты
- •1.2.5. Объекты пояса Койпера. Кометы
- •Глава 1.3. Физические особенности Земли
- •1.3.1. Гравитационное поле и фигура Земли
- •1.3.2. Атмосфера Земли
- •1.3.3. Магнитное поле Земли
- •1.3.4. Корпускулярная радиация в околоземном космическом пространстве
- •1.3.5. Космический мусор и его характеристики
- •Раздел 2. МЕХАНИКА ПОЛЕТА
- •2.1.1. Способы выведения космических аппаратов на орбиту
- •Глава 2.2. Орбитальное движение
- •2.2.1. Невозмущенное орбитальное движение
- •2.2.1.1. Задача двух тел
- •2.2.1.2. Интегралы и уравнение Кеплера
- •2.2.1.3. Орбитальные элементы
- •2.2.1.4. Определение орбит в задаче двух тел
- •2.2.2. Возмущенное орбитальное движение
- •2.2.2.2. Влияние сжатия и атмосферы Земли на движение ИСЗ
- •2.2.2.3. Баллистические модели движения ИСЗ
- •2.2.4. Баллистические условия полета КА
- •2.2.5. Особые орбиты искусственных спутников Земли
- •2.2.5.1. Геостационарные орбиты
- •2.2.5.6. Критическое наклонение и орбиты типа «Молния»
- •Глава 2.3. Межорбитальные перелеты космических аппаратов
- •2.3.1. Понятие космического перелета. Перелет с конечной тягой, импульсный перелет
- •2.3.2. Реактивная сила. Формула Циолковского
- •2.3.4. Необходимые условия оптимальности перелета
- •2.3.5. Случай центрального ньютоновского гравитационного поля
- •2.3.6. Некоторые импульсные перелеты
- •2.3.7. Перелеты между околокруговыми орбитами
- •2.3.8. Оптимальные перелеты с конечной тягой
- •2.4.1. Управление геостационарной орбитой
- •2.4.2. Поддержание высокоэллиптических орбит
- •2.4.3. Поддержание высотного профиля полета Международной космической станции
- •2.4.4. Поддержание солнечной синхронности круговой орбиты
- •2.4.5. Поддержание стабильности местного времени прохождения восходящего узла круговой ССО
- •2.4.6. Управление высотой и трассой низкой круговой орбиты
- •2.4.7. Разведение спутников на круговой орбите
- •Глава 2.5. Спутниковые системы
- •2.5.1. Спутниковые системы и их баллистическое проектирование
- •2.5.2. Спутниковые системы непрерывного зонального обзора на круговых орбитах
- •2.5.2.1. Спутниковые системы на основе полос непрерывного обзора
- •2.5.2.2. Кинематически правильные спутниковые системы
- •2.5.3. Спутниковые системы периодического зонального обзора на круговых орбитах
- •2.5.3.1. Предпосылки создания современной теории периодического обзора
- •2.5.3.2. Регулярные спутниковые системы
- •2.5.3.3. Элементы маршрутной теории оптимизации спутниковых систем периодического обзора
- •2.5.3.4. Некоторые закономерности оптимальных решений
- •2.5.4. Спутниковые системы непрерывного локального обзора на эллиптических орбитах
- •2.5.5. Управление спутниковыми системами на круговых орбитах
- •Глава 2.6. Лунные и межпланетные траектории
- •2.6.1. Лунные траектории космических аппаратов
- •2.6.2. Траектории полета к планетам, астероидам, кометам
- •Глава 3.1. Типы (классификация) аэродинамических компоновок
- •3.1.3. Многоблочные компоновки с продольным разделением ступеней
- •3.1.4. Многоблочные компоновки с продольным делением ступеней и навесными полезными грузами
- •3.1.5. Выступающие и отделяемые элементы конструкции
- •3.3.1. Экспериментальные методы исследований
- •3.3.3. Аналоговые испытания
- •3.3.4. Численные методы расчета аэродинамических характеристик ракет
- •3.4.1. Ветровое воздействие на ракету при старте и транспортировании. Влияние стартовых сооружений и транспортировочных агрегатов
- •3.4.2. Ветровые нагрузки вблизи земли
- •3.4.3. Местные нагрузки при обтекании стационарным потоком
- •3.4.4. Распределенные аэродинамические нагрузки
- •3.4.5. Статическая устойчивость
- •3.4.6. Аэродинамические характеристики стабилизирующих устройств
- •3.4.8. Разделение ступеней ракет
- •3.4.9. Круговые аэродинамические характеристики тел вращения
- •3.4.11. Аэродинамическое воздействие на полезный груз в процессе отделения створок головных обтекателей
- •3.4.12. Аэродинамика отделяемых ступеней и элементов конструкции. Зоны падения (отчуждения)
- •3.5.3. Влияние струй двигателей на аэродинамические характеристики
- •3.5.4. Аэродинамическое нагружение выступающих элементов конструкции. Методы снижения нагрузок
- •3.5.5. Аэродинамические характеристики блоков многоблочных ракет в процессе их отделения
- •3.6.4. Дренирование элементов конструкции
- •3.6.5. Авиационное транспортирование
- •Глава 3.7. Термостатирование отсеков ракет при наземной подготовке
- •3.7.1. Задачи термостатирования. Ограничения. Методы решения
- •3.8.2. Классификация пусковых установок по их конструктивным схемам
- •3.8.4. Особенности тепловых процессов при старте
- •Глава 3.10. Собственная атмосфера космических аппаратов и ее влияние на функционирование приборов и систем
- •3.10.1. Экспериментальные исследования собственной внешней атмосферы космических аппаратов и станций
- •3.10.2. Особенности изменения давления в негерметичных отсеках геостационарных спутников
- •Глава 3.11. Загрязнение поверхностей космических аппаратов и методы его уменьшения
- •3.11.1. Источники загрязнения космических аппаратов
- •Глава 3.12. Аэрогазодинамика спускаемых аппаратов
- •3.13.2. Метеороиды
- •3.13.3. Космический мусор
- •3.13.4. Расчет вероятности непробоя КА метеороидами и техногенными частицами
- •3.13.5. Воздействия микрометеороидов и техногенных частиц на поверхность космического аппарата
- •3.14.2. Акустика и пульсации давления при старте ракет
- •3.14.3. Аэроакустические воздействия на ракеты в полете
- •3.14.4. Акустические воздействия на космические аппараты при наземной подготовке и в полете
- •4.2.1. Цели классификации
- •4.2.3. Систематическая классификация
- •Глава 4.3. Создание космических комплексов
- •4.3.2. Принципы обеспечения качества и надежности
- •4.3.3. Порядок создания космических комплексов
- •5.1.1. Теоретические основы проектирования летательных аппаратов
- •5.2.2. Схема многоуровневого исследования модернизации ракетного комплекса. Состав задач и математические модели
- •5.2.4. Задача оптимизации параметров модификаций ЛА. Математическая модель
- •5.2.6. Исследование эффективности модернизации РК
- •5.2.7. Анализ модификации ЛА с РДТТ при наличии неконтролируемых факторов
- •5.3.3. Проектирование топливных баков
- •5.3.4. Цилиндрические оболочки
- •Глава 5.5. Модели и методы исследования устойчивости и управляемости баллистических ракет
- •5.5.3. Исследование устойчивости продольных колебаний БР
- •Раздел 6. СРЕДСТВА ВЫВЕДЕНИЯ
- •Глава 6.1. Общая концепция
- •6.2.3 Ракеты носители «Циклон», «Зенит», «Зенит 3 SL»
- •6.3.3. МТКС «Спейс Шаттл»
- •Глава 6.4. Разгонные блоки
- •6.4.1. Разгонные блоки типа ДМ
- •6.4.2. Разгонные блоки типа «Бриз»
- •6.4.3. Разгонные блоки типа «Фрегат»
- •Глава 7.1. Жидкостные ракетные двигатели
- •7.1.1. Принципиальная схема ЖРД
- •7.1.3.1. Запуск
- •7.1.3.2. Работа ЖРД в полете
- •7.1.3.3. Автоматика ЖРД
- •7.1.3.4. Обеспечение устойчивой работы
- •7.1.4. Камера
- •7.1.4.1. Газодинамический расчет
- •7.1.4.2. Профилирование камеры
- •7.1.4.3. Тепловой расчет камеры
- •7.1.4.4. Конструирование камеры
- •7.1.4.5. Изготовление камеры
- •7.1.5. Газогенератор
- •Глава 7.2. Стендовые испытания двигательных установок
- •7.2.1. Задача отработки
- •7.2.2. Методика экспериментальной отработки жидкостных ракетных двигательных установок
- •7.2.4. Комплексные испытания пневмогидравлических систем и двигательных установок
- •Глава 8.1. Системы управления средств выведения
- •8.1.1. Назначение и область применения системы управления средств выведения
- •8.1.3. Функциональная структура и приборный состав систем управления средств выведения
- •8.1.4. Бортовой вычислительный комплекс и взаимодействие смежных систем
- •8.1.5. Навигация и наведение. Терминальное управление
- •8.1.6. Точность управления выведением полезного груза
- •8.1.7. Этапы развития систем управления средств выведения
- •8.1.9. Надежность и стойкость систем управления к помехам
- •8.1.10. Организация и обработка потоков информации о работе систем управления
- •8.1.11. Тенденция развития систем управления средств выведения
- •8.2.1. Бортовая аппаратура системы управления
- •8.2.2. Бортовое программное обеспечение
- •8.2.4. Наземная аппаратура системы управления
- •Глава 8.3. Системы разделения
- •8.3.1. Требования к системам разделения
- •8.3.2. Основные типы систем разделения
- •8.3.3. Исполнительные элементы систем разделения
- •8.3.4. Силы, действующие на разделяемые тела
- •8.3.5. Расчет систем разделения
- •8.3.6. Экспериментальная отработка систем разделения
- •8.3.7. Расчет надежности
- •8.5.1. Система одновременного опорожнения баков
- •8.5.2. Потребное давление наддува баков
- •Глава 8.6. Управление двигательной установкой
- •Глава 8.7. Исполнительные органы
- •Глава 8.8. Исполнительные приводы систем управления

Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
160 |
Глава 2.4. УПРАВЛЕНИЕ И ПОДДЕРЖАНИЕ ОРБИТ КА |
|
|
Номинальные затраты характеристической скорости на удержание КА по широте составля ют ежегодно от ~45 до ~55 м/c с периодом ~18 лет — период Сароса (период полного оборота на эклиптике восходящего узла лунной орбиты). Максимумы приходятся на 2006, 2024 г. и т.д.
СПИСОК ЛИТЕРАТУРЫ
1.Чернявский Г.М., Бартенев В.А. Орби ты спутников связи. М.: Связь, 1978. 240 с.
2.Чернявский Г.М., Бартенев В.А., Малы шев В.А. Управление орбитой стационарного спутника. М.: Машиностроение, 1984. 144 с.
3.Chao C. C.G. Applied Orbit Perturbation and Maintenance, AIAA, Inc., Reston, Virginia, USA. 2005. 264 p.
4.Kamel A.A., Wagner C.A. On the Orbital Eccentricity Control of Synchronous Satellites // Journal of the Astronautical Sciences. 1982. V. 30,
№1. Р. 61–73.
5.Славинскас Д., Деббачи Д.Ю. и др. Эф фективный метод коррекции наклонения ор биты геостационарного спутника // Аэрокос мическая техника. 1988. №. 6. С. 188.
2.4.2.ПОДДЕРЖАНИЕ ВЫСОКОЭЛЛИПТИЧЕСКИХ ОРБИТ
Особенности поддержания высокоэллиптических орбит
Долговременное поддержание высокоэл липтических орбит заключается в сохранении отклонений орбитальных элементов и/или трассы КА в заданных пределах относительно их номинальных значений путем периодиче ского проведения корректирующих маневров. В зависимости от требований к КА корректи руемыми могут быть не все орбитальные эле менты, а какие то комбинации. Простейшим случаем является коррекция поддержания трас сы КА. Если КА входит в спутниковую систему и требуется согласование движений смежны спутников, то может возникнуть необходи мость коррекции времени прохождения.
Отличительная особенность поддержа ния — движение КА в окрестности номи нальной орбиты и использование малых корректирующих импульсов и/или маневров с малой тягой, например, с использованием электрореактивных двигателей. В отличие от межорбитальных перелетов, где параметры переходной орбиты заранее неизвестны, в этой задаче частные производные орбиталь ных элементов и функции влияния коррек
тирующих воздействий известны большой точностью.
Методы анализа и расчета импульсных маневров поддержания высокоэллиптических орбит представлены в [1–2].
Управление трассой полета на орбите «Молния»
Управление трассой полета означает удер жание долготы восходящего узла (одного из двух суточных витков) в диапазоне географиче ских долгот:
(t) н / , |
(2.4.16) |
где н — номинальная долгота узла; — точ ность удержания.
Для любого диапазона долгот можно по строить множество фазовых траекторий для (или отклонение орбитального периода Т) от, в том числе предельный цикл, как для управления долготой геостационарного ИСЗ (разд. 2.4.1) Φ4Γ. При этом корректирующие трансверсальные маневры проводятся на од ной из границ географического диапазона удержания. При проведении маневров в пери гее орбиты суммарные затраты в м/с характе ристической скорости на поддержание трассы составят Φ6Γ:
Vгод 2,75sin(2 н 46 ). |
(2.4.17) |
Оптимизация поддержания высокоэллиптической орбиты типа «МОЛНИЯ» для КА с малой тягой
Предполагается, что движение КА мож
но представить в виде точечной массы, он имеет двигатель, обеспечивающий реактивное ускорение ограниченной величины 0 5 ap 5
5 ap max, направленное по единичному векто ру е (eт e Λ 1).
Уравнения движения КА: |
|
|||
|
dY |
(t) f [Y (t),a(t), e(t)], |
(2.4.18а) |
|
|
dt |
|
|
|
где Y т (t) [r т (t)V т (t)]; |
|
|
||
|
|
|
V (t) |
|
f [Y (t),a(t), e(t)] a |
(t)e(t) .r(t) , (2.4.18б) |
|||
|
|
P |
r 3 |
|
|
|
|
(t) |
|
где r(t), V(t) — радиус вектор и вектор скорости соответственно; — гравитационный пара метр.
Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
ПОДДЕРЖАНИЕ ВЫСОКОЭЛЛИПТИЧЕСКИХ ОРБИТ |
161 |
|
|
Условия по поддержанию орбиты на ин тервале времени Φ0, tfΓ могут быть представле ны в виде [7]:
F [X (t f 1), X (t f 2),..., X (t f )] Pf , (2.4.19)
где F — некоторая векторная функция, опре деляющая зависимость орбитальных элемен тов от векторов состояния во внутренних точ ках и/или в конечной точке интервала; Pf — вектор целевых значений орбитальных эле ментов и/или функций от них, имеющих раз мерность m.
Предполагается, что интервал времени Φ0, tfΓ разбит на n малых, в общем случае, неодинаковых n подынтервалов ti ti 1 ti, и известны приближенные значения функ ции F(ti) в опорные моменты времени ti. На каждом подынтервале времени вектор управления ai постоянен, тогда для краевых условий (2.4.19) имеется приближенное со отношение:
Pf (t f ) P*f (t f ) |
F (ti ) |
ai ti , |
(2.4.20) |
|
|||
i 1 |
0a |
|
|
где P*f (t f ) — значение краевых условий на не возмущенной (т.е. пассивной) траектории КА в момент tf; 0F / 0a — матрица частных производ ных функции влияния.
Считается, что вектор управления (век тор тяги) ориентирован в плоскости мест ного горизонта произвольным образом, и
работы двигателя не должно превы длительности этого подынтервала
ti max. Приобретаемый на этом подынтерва ле импульс скорости будет не более Vi max
ap max ti max.
Возможные направления вектора тяги представляются в виде некоторого дискрет ного набора ориентаций, образованного деле нием диапазона Φ0, 2Γ на малые углы
2 /k (см. рис. 2.4.6, а).
На каждом подынтервале искусственно вводится k псевдоимпульсов, однако их сумма по модулю не должна превышатьVi max. Тогда в оптимальном по затратам характеристической скорости решении не может быть более двух смежных псевдоим пульсов, поскольку сумму двух несмежных или трех или более векторов псевдоимпуль сов всегда можно заменить двумя смежны ми псевдоимпульсами, имеющими наимень шую сумму [7].
Пусть Vi opt — оптимальное решение для i го подынтервала (рис. 2.4.6, б). Наилуч шим приближением к оптимальному реше нию из имеющегося набора псевдоимпульсов с дискретными ориентациями в общем случае будет решение для двух смежных псевдоим пульсов между которыми располагается опти мальный импульс Vi opt. В частном случае это может быть один псевдоимпульс, бли жайший по направлению к Vi opt, т.е. опти мальное решение заменяется приближенным значением.
Рис. 2.4.6. Псевдоимпульсы в плоскости:
а — возможные направления вектора тяги; б — оптимальное решение для i го подынтервала

Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
162 |
Глава 2.4. УПРАВЛЕНИЕ И ПОДДЕРЖАНИЕ |
КА |
|
|
|
Подобным образом может быть рассмот рена пространственная ориентация вектора тя ги [5, 7].
Вводится вектор неизвестных перемен ных Х, включающий все псевдоимпульсы на всех подынтервалах размерностью (n k):
X т [ V1(1), V1( 2),..., V1( k ), V2(1), V2( 2),...
..., V2( k ),..., Vn( k )]. (2.4.21)
Компоненты этого вектора могут быть только неотрицательными. Тогда для этого век тора имеется линейное неравенство:
AX 5 b, |
(2.4.22) |
где А — матрица размером [n (n k)], имеющая следующую структуру (показаны только нену левые элементы):
|
|
|
|
|
|
|
111...1 |
|
|
|
|||
|
|
|
|
|
|
|
k |
|
|||||
A |
111...1 |
|
|
|||
|
|
|||||
|
|
n. (2.4.23) |
||||
|
|
|
111...1 |
|
|
|
|
|
|
|
|||
|
|
|
|
111...1 |
|
|
|
||||||
|
|
|
n k |
|
|
|
Вектор bт [ V1 max , V2 max ,..., Vn max ] име ет размерность равную числу подынтервалов.
Для вектора Х краевые условия (2.4.19) примут вид:
Pf Pf P*f Ae X , |
(2.4.24а) |
где Ае — матрица размером [m (n k)]:
0F1
0V1(1)
Ae ........
0Fm
0V1(1)
0F1 |
... |
0F1 |
|
0F1 |
... |
0F1 |
|
|
|
|
|
|
|
||
0V ( 2 |
0V ( k) |
|
0V (1) |
0V ( k ) |
|||
1 |
|
1 |
2 |
... |
n |
|
|
........ |
|
........ ........ |
........ . |
||||
0Fm |
|
0Fm |
|
0Fm |
... |
0Fm |
|
0V ( 2 |
|
0V ( k) |
|
0V (1) |
0Vn( k ) |
|
|
1 |
|
1 |
2 |
|
|
|
|
|
|
|
|
|
(2.4.24б) |
||
Вектор P*f рассчитывается по невозму щенной траектории. Определим вектор коэф фициентов qт Φ1 1…1 1Γ из (n k) элементов для равномерных подынтервалов. В случае не равномерных подынтервалов этот вектор пред
ставим в виде qт [ t1max ... tnmax ].
В итоге проблема оптимальной много витковой коррекции поддержания формулиру ется как задача классического линейного про
граммирования: найти вектор Х, минимизи рующий линейный функционал
J min (qт X ) |
(2.4.25) |
при линейных ограничениях в виде равенства (2.4.24), неравенства (2.4.22) и неотрицатель ных значениях всех элементов вектора Х:
0 5 V ( j ) 5 V |
i max |
. |
(2.4.26) |
i |
|
|
Вподобной формулировке задача имеет весьма высокую размерность (тысячи десятки тысяч переменных). Современные методы ли нейного программирования высокого порядка, использующие алгоритмы внутренней точки [3], позволяют эффективно решать подобные задачи.
Впостановке с дискретизацией по време ни каждый подынтервал рассматривается не зависимо от других как в части времени рабо ты двигателя, так и в части ориентации векто ра тяги. Поэтому полученное решение требует специальной обработки, заключающейся в объединении последовательности смежных интервалов с максимальными продолжитель ностями в один непрерывный маневр [5, 7]. Критерием включения в обработку является наличие ненулевых компонент вектора Х. Да лее для выбранных компонент вектора Х, от носящихся к одному подынтервалу, уточняет ся ориентация вектора тяги. В непрерывной последовательности смежных подынтервалов, кроме первого и последнего, все внутренние подынтервалы должны иметь максимальную продолжительность, а первый и последний по дынтервалы при неполной продолжительности сдвигаются соответственно вправо и влево. Та ким образом может быть получен конечный набор непрерывных маневров.
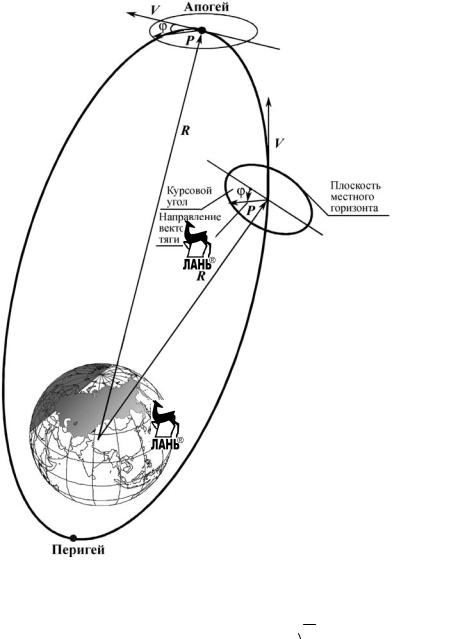
Целью управления для высокоэллипти ческой орбиты типа «МОЛНИЯ» [7] являет ся сохранение трассы полета КА относитель но Земли и близких к номинальным значе ниям орбитальных элементов наклонения
орбиты iN, аргумента перигея N и эксцен триситета eN. Коррекция орбитального пе риода Т (или большой полуоси орбиты а) в явном виде не требуется, поскольку он ста билизируется при коррекции трассы. КА имеет двигательную установку с малой тягой
ивозможностью ориентации вектора тяги в произвольном направлении плоскости мест ного горизонта (рис. 2.4.7).
Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
ПОДДЕРЖАНИЕ ВЫСОКОЭЛЛИПТИЧЕСКИХ ОРБИТ |
163 |
|
|
Курсовой угол отсчитывается от про екции вектора скорости на эту плоскость. Поскольку при длительном интервале под держания обеспечение требуемой долготы восходящего узла на конец интервала может не обеспечивать выполнение требований по отклонению долготы внутри этого интерва ла, вектор прицельных параметров должен быть расширен путем введения в него до полнительных условий по долготе восходя щего узла во внутренних точках этого ин тервала.
Рис. 2.4.7. Ориентация вектора тяги
условий (2.4.19) Pfт
N 30 ], где IN — на
— аргумент перигея; орбиты; N — номиналь долготы восхо Частные производные ор определяются на основе движения (2.2.50).
вид:
|
|
|
|
|
|
|
|
|
|
|
i ; |
|
|
|
|
(2.4.27) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
j |
|
ri sinui cos IN |
a |
t |
; |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin IN |
|
p |
i |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.4.28) |
|||
|
0e |
|
1 |
[(p r )cosu |
i |
r e]cos a |
t |
, |
(2.4.29) |
|||||||||||
|
0V ( j ) |
|
|
h |
i |
i |
|
j p |
i |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где h 
 .p, p aN (1 eN2 ) — соответственно ин теграл энергии и параметр орбиты, соответст вующие номинальной орбите; аN — номиналь ное значение большой полуоси; ti — длитель ность i го подынтервала; ui — аргумент широ ты, ui ; N i ; i — истинная аномалия; ri — модуль радиус вектора.
.p, p aN (1 eN2 ) — соответственно ин теграл энергии и параметр орбиты, соответст вующие номинальной орбите; аN — номиналь ное значение большой полуоси; ti — длитель ность i го подынтервала; ui — аргумент широ ты, ui ; N i ; i — истинная аномалия; ri — модуль радиус вектора.
Производная для географической долго ты узла имеет вид:

Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
164 |
Глава 2.4. УПРАВЛЕНИЕ И ПОДДЕРЖАНИЕ ОРБИТ КА |
|
|
|
0 N |
|
0 N (ti ) 0T |
|
|
0a |
, |
(2.4.30) |
|||||||
|
0V ( j ) |
|
0T |
|
|
|
0a 0V |
( j ) |
|||||||
|
|
|
|
|
|
|
|
||||||||
|
i |
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 N ; |
(t |
f |
t |
) /T ; |
|
(2.4.31) |
||||||||
|
0T |
|
|
з |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0T |
|
|
3. |
|
|
; |
|
|
(2.4.32) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
0a |
|
aN4 |
|
|
|
. / aN3 |
|
|
|
|||||
|
0a |
|
2a2 P |
|
|
|
|
|
|
|
|
|
|||
|
|
|
N |
|
|
cos |
j |
a |
t |
; |
(2.4.33) |
||||
|
|
|
|
|
|
||||||||||
|
0Vi( j ) |
|
hri |
|
|
|
|
|
|
p |
i |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
з — угловая скорость вращения Земли. Поскольку орбита является эллиптиче
ской, то для дискретизации по времени пред
почтительней использовать неодинаковые по времени подынтервалы — меньшие в окрест ности перицентра и б льшие в окрестности апоцентра. Каждый виток разделяется на оди наковые по изменению на подынтервале зна чения истинной аномалии, а соответствующие границам подынтервалов времена рассчитыва ются по параметрам номинальной орбиты на основе уравнения Кеплера.
В качестве примера приводятся результа ты для орбиты с критическим наклонением IN 63,4 , суточным орбитальным периодом tN 86 164s, эксцентриситетом eN 0,27 и аргу ментом перигея N 90 . Точность удержа ния трассы в восходящем узле орбиты равна
Рис. 2.4.8. Изменение |
элементов на годовом интервале: |
а — долготы восходящего узла N; б — |
орбиты I; в — аргумента перицентра ; г — экс |
|
центриситета е |

Аджян А.П., Аким Э.Л., Алифанов О.М., Андреев А.Н. Ракетно-космическая техника. Машиностроение. Энциклопедия. T. IV-22 В двух книгах. Книга первая
ПОДДЕРЖАНИЕ ВЫСОКОЭЛЛИПТИЧЕСКИХ ОРБИТ |
165 |
|
|
Рис. 2.4.9. Характеристики распределения маневров по виткам для месячного периода с максимальными затратами топлива:
1, 2, 3 — углы курса 44…50; 155…209; 312…320 град. соответственно
/1 , интервал поддержания составляет 30 сут. Внутренние точки для условий по долготе вос ходящих узлов рассчитывались через 10 и 20 суток. Реактивное ускорение принималось равным ар 1 10 8 км/с2.
При расчете отклонений для невозму щенной траектории учитывались нецентраль ность гравитационного поля Земли (гармони ки до 12 го порядка включительно для модели гравитационного поля Земли), гравитацион ные возмущения от Луны и Солнца и давление солнечного света. Результаты моделирования на годовом интервале (последовательное ре шение 12 задач поддержания, каждая с 30 дневным интервалом) показаны на рис. 2.4.8, где представлены изменения долго ты восходящего узла N (рис. 2.4.8, а), накло нения орбиты I (рис. 2.4.8, б), аргумента пери центра (рис. 2.4.8, в) и эксцентриситета е (рис. 2.4.8, г) при наличии коррекций орбиты (сплошные толстые линии) и пассивном полете (тонкие линии). В целом лунно сол нечные возмущения существенно зависят от эпохи и положения орбиты в инерциальном пространстве, это приводит к существенному различию характера орбитальных маневров в течение года. Месячные затраты на поддержа
ние орбиты составляют VX 2,9…7,9 м/с, а суммарные за год — VX год 58 м/с.
Характеристики распределения маневров по виткам для месячного периода с макси мальными затратами топлива показаны на рис. 2.4.9 в виде закрашенных прямоугольни ков с высотой, соответствующей их длитель ности. Интенсивность фона закраски соответ ствует значению курсового угла по верти кальной шкале, находящейся справа.
СПИСОК ЛИТЕРАТУРЫ
1.Назаренко А.И., Скребушевский Б.С. Эво люция и устойчивость спутниковых систем. М.: Машиностроение, 1981. 284 с.
2.Попович П.Р., Скребушевский Б.С. Бал листическое проектирование космических сис тем. М.: Машиностроение, 1987. 240 с.
3.Схрейвер А. Теория линейного и цело численного программирования. М.: Мир, 1991.
Т.1. 360 с.
4.Чернявский Г.М., Бартенев В.А. Орби ты спутников связи. М.: Связь, 1978. 240 с.
5.Улыбышев Ю.П. Концепция множеств псевдоимпульсов для оптимизации траекторий космических аппаратов // Полет. 2008. № 2. С. 52–60.