

2.5.1. Импульс материальной точки
Импульсом материальнойточкимассойm, движущейся со скоростьюVназывают векторную физическую величину, равную произведению массы точки на ее скорость:
![]() .
.
Обратим внимание, что в литературе предыдущих лет широко использовался термин "количество движения", в настоящее время вместо него рекомендовано использовать термин "импульс".
Дифференцируя соотношение (2.22) по времени, получим:
![]() .
.
Из последнего соотношения следует, что уравнение второго закона Ньютона можно записать следующим образом:
![]() .
.
Известно, что первая производная некоторой величины по времени характеризует скорость ее изменения, поэтому уравнение (2.23) читают так:
скорость изменения импульса материальной точки равна действующей на нее силе.
Пусть на материальную точку m действует несколько постоянных сил F1, F2, … Fi. Обозначим равнодействующую этих сил через R:
![]() ,
,
и пусть t – время действия этих сил. Разделим этот промежуток времени на малые промежутки dt. За время dt, под действием внешних сил скорость материальной точки изменится в соответствии со вторым законом Ньютона:
![]() .
.
Разделяя
переменные в последнем соотношении
![]() ,
и интегрируя по времени в пределах отt1
до
t2
(t=
t2-
t1)
, получим:
,
и интегрируя по времени в пределах отt1
до
t2
(t=
t2-
t1)
, получим:
![]() .
.
Преобразуем полученное выражение к виду, определяющему изменение импульса:
![]() .
.
В проекциях на оси координат формула (2.24) записывается так:

Импульсдействиясилы– векторная величина, равная произведению силыFна время ее действияt.
Смысл соотношения (2.24) может быть выражен следующим образом:
приращение импульса материальной точки равно импульсу действия силы
![]() или
или
![]() .
.
Если сила F изменяется с течением времени, то импульс действия силы К равен
![]() ,
,
где t1 и t2 время начала и окончания действия силы.
2.5.2. Импульс механической системы
Определение механической системы, как совокупности тел, рассматриваемых в данной задаче, позволяет считать механической системой совокупность материальных точек, материальное тело, а также совокупность материальных тел.
ИмпульсР механической системы, состоящей из N материальных точек (тел) равен векторной сумме импульсов этих точек (тел), входящих в эту систему:
![]() .
.
Таким образом, импульс – есть величина аддитивная.
При поступательном движении все точки тела описывают одинаковые траектории и имеют в каждый момент времени одинаковые по величине и направлению скорости и ускорения. Импульс Р тела, имеющего конечные размеры и массу m, движущегося поступательно со скоростью V, равен импульсу материальной точки такой же массы m, движущейся с той же скоростью:
Р=mV.
Заметим, что силы, действующие на материальную точку, всегда происходят от иных материальных точек (тел). На тела механической системы могут действовать силы со стороны тел системы, так и со стороны тел, не входящих в эту систему. Силы взаимодействия между телами системы называются внутренними; силы, действующие со стороны иных тел, называются внешними.
Внутренние силы– это силы взаимодействия между телами механической системы.
В дальнейшем силы будут обозначаться следующим образом: fij – внутренняя сила, действующая на i-ое тело системы со стороны j-го тела системы, Fi – внешняя сила, действующая на i-ое тело системы.
Рассмотрим механическую систему, состоящую из N материальных точек массами m1, m2, …, mN. Предположим, что на каждое из них действуют как тела самой системы, так и внешние, по отношению к ней, тела.
Запишем уравнение второго закона Ньютона для каждого из тел системы:
![]() ,
(i=1, 2, …,N).
,
(i=1, 2, …,N).
Сложим почленно правые и левые части уравнений, в результате чего получим
![]() .
.
Третий закон Ньютона позволяет утверждать, что сумма всех внутренних сил, действующих в системе, равна нулю. Таким образом:
![]() .
.
Преобразуем полученное соотношение:
![]()
Обозначим
![]() черезRВНЕШ
–
равнодействующую всех внешних сил, а
черезRВНЕШ
–
равнодействующую всех внешних сил, а
![]() как
Р – импульс
системы.
как
Р – импульс
системы.
Уравнение (2.30) примет вид:
![]() .
.
Можно сделать следующие выводы.
Скорость изменения импульса механической системы равна сумме внешних сил, действующих на эту систему.
Уравнение (2.23), полученное для материальной точки, аналогично уравнению (2.31) справедливому для системы материальных точек и для механической системы.
Замечание.
Импульс тела, имеющего неподвижную ось вращения, равен нулю.
Это утверждение несложно доказать в общем случае. Проиллюстрируем его примером. Вычислим импульс однородного диска, вращающегося вокруг неподвижной оси, проходящей через его центр.
|
|
Рис. 2.15 |
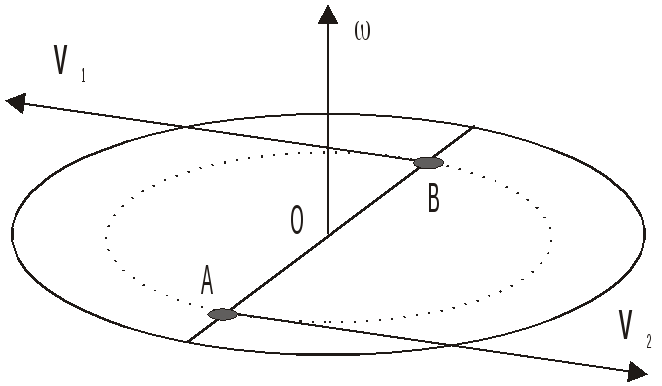
Для этого разделим мысленно диск на элементарные части, так, чтобы массы этих частей были одинаковыми. Рассмотрим две частицы тела dm1 и dm2, расположенные в точках А и В диаметра на равных расстояниях и по разные стороны от центра диска (см. рис.2.15).
Линейные скорости этих частиц равны по величине, но противоположны по направлению: V1= – V2. Суммарный импульс частиц dm1 и dm2 равен нулю, т. к.
dm V1+dm V2=dm (V1+V2)=0.
Так как каждой частице на диске найдется частица ей диаметрально противоположная, то суммарный импульс диска равен нулю.
Импульс имеет большое значение при рассмотрении процессов соударения, которые будут рассматриваться далее.
Удар – взаимодействие, протекающее в течение малого промежутка времени.
Абсолютнонеупругимударомназывается взаимодействие, в результате которого тела начинают двигаться вместе с одинаковыми скоростями. Можно говорить, что при неупругом ударе образуется составное тело с массой, равной массе сталкивающихся тел.
Абсолютноупругимударомназывается взаимодействие, в результате которого скорости тел изменяются, но суммарные импульс механическая энергия остаются неизменными.