

10.2.4. Взаимосвязь массы и энергии
Воспользуемся релятивистским соотношением (10.51) для полной энергии частицы массой m, движущейся со скоростью V:
 ,
,
или выражением (10.44) использующим понятие релятивистской массы:
![]() .
.
Очевидно, что энергия и релятивистская масса пропорциональны друг другу; соотношение (10.54) устанавливает эквивалентность массы и энергии. Из этого же соотношения следует:
![]() .
.
Физический смысл выражения (10.56) состоит в следующем:
изменение релятивистской энергии (кроме энергии во внешнем поле) влечет изменение релятивистской массы тела:
![]() .
.
10.2.5. Связь между энергией и импульсом тела
Соотношения (10.46) и (10.52) показывают, что энергия тела и его импульс зависят от системы отсчета, принятой в данном конкретном случае. Покажем, что величина
E2-P2c2
имеет одно и тоже значение во всех инерциальных системах отсчета. Воспользуемся указанными формулами и запишем:
![]() ,
,
или окончательно
![]() .
.
Полученное соотношение позволяет записать полезные формулы:
![]() ,
,
![]() .
.
Схема решения задач по кинематике
Записав условие задачи, сделать рисунок, на котором указать систему координат, изобразить траекторию движения точки. Отметить на рисунке кинематические характеристики движения: перемещение, скорость, ускорение. Если указывается, что на отдельных участках движение имеет различный характер, то необходимо рассматривать движение на каждом из них отдельно.
Установить связь между величинами, отмеченными на рисунке. Поскольку для решения системы уравнений и расчетов используется скалярная форма уравнений, то необходимо спроецировать входящие в уравнения векторы на оси выбранной системы координат. Полученную систему уравнений дополнить уравнениями, составленными на основе вспомогательных условий задачи и, проверив равенство количества уравнений и количества неизвестных, входящих в нее, решить систему кинематических уравнений относительно искомых величин.
Практическое занятие 1.
Теория
Положение материальной точки в пространстве задается радиусом-вектором г:
![]()
где i, j, k — единичные векторы направлений (орты); х, у, z — координаты точки.
Кинематические уравнения движения в координатной форме:
![]()
![]()
где t — время.
• Средняя скорость
![]()
где
![]() — перемещение
материальной точки за интервал времени
— перемещение
материальной точки за интервал времени![]() .
.
Средняя путевая * скорость
![]()
где
![]() — путь, пройденный точкой за интервал
времени
— путь, пройденный точкой за интервал
времени![]() .
.
Мгновенная скорость
![]()
где
![]() —
проекции скорости v
на оси координат.
—
проекции скорости v
на оси координат.
Модуль скорости
![]()
•![]() Ускорение
Ускорение
![]()
где проекции ускорения a на оси
координат.
Модуль ускорения
![]()
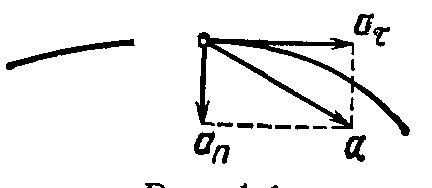
![]() и тангенциальной
и тангенциальной ![]() составляющих (рис.1.1):
составляющих (рис.1.1):
![]()
Модули этих ускорений:
![]()
где R — радиус кривизны в данной точке траектории.
• Кинематическое уравнение равномерного движения материальной точки вдоль оси х
![]()
где
![]() — начальная
координата; t
— время. При
равномерном движении
— начальная
координата; t
— время. При
равномерном движении
v=const и a=0.
• Кинематическое
уравнение равнопеременного движения(![]() )вдоль
оси x
)вдоль
оси x
![]()
где v0 —начальная скорость; t— время.
Скорость точки при равнопеременном движении
v=v0+at.