

Влияние величины сопротивления на характер колебательного движения
При движении материальной точки в реальных условиях возникает сила сопротивления, которая при малых скоростях может, в некотором приближении, считаться прямо пропорциональной первой степени скорости точки: FТР = rV, где r – постоянный коэффициент.
В зависимости от коэффициента сопротивления различают три вида затухающих колебательных движений:
А. Случай малого сопротивления ( = r/2m < 0).
Этот случай подробно рассмотрен выше. Было установлено, что пружинный маятник с трением совершает затухающие колебания, подчиняющиеся следующему закону:
![]() .
.
Колебания,
описываемые формулой (7.23), строго говоря,
не является гармоническим, так как их
амплитуда
![]() монотонно убывает со временем. По
аналогии со свободными гармоническими
колебаниями можно ввести понятия о
круговой частоте (см. (7.24)), периоде (7.26)
и амплитуде (7.25) таких колебаний.
монотонно убывает со временем. По
аналогии со свободными гармоническими
колебаниями можно ввести понятия о
круговой частоте (см. (7.24)), периоде (7.26)
и амплитуде (7.25) таких колебаний.
В. Случай большого сопротивления ( > 0).
Анализ влияния сопротивления в этом (и следующем разделе С) проведем качественно. Общее решение уравнения (7.22) не содержит функции синуса или косинуса. Система движется согласно уравнению:
 .
.
Благодаря
экспоненциальному множителю колебание
быстро затухает (при t
имеем x0).
Характер движения зависит от начальных
условий. При х0
0
и V0>0,
т. е. когда в начальный момент материальная
точка смещена из положения статического
равновесия в направлении оси х, и ей
сообщена начальная скорость в том же
направлении, материальная точка вначале
отклоняется в указанном направлении
(рис. 7.6, кривая I),
а затем асимптотически приближается к
положению равновесия (не переходя через
него). При х0
>0
и V0<0
(и
![]() ),
то есть, когда в начальный момент
материальная точка смещена из положения
статического равновесия нах0,
и
ей сообщена противоположно направленная
скорость, модуль которой удовлетворяет
указанному выше неравенству, материальная
точка приближается к положению равновесия,
проходит его (рис. 7.6, кривая 2) и отклоняется
в противоположную сторону и затем
асимптотически приближается к положению
равновесия (больше не переходя через
него).
),
то есть, когда в начальный момент
материальная точка смещена из положения
статического равновесия нах0,
и
ей сообщена противоположно направленная
скорость, модуль которой удовлетворяет
указанному выше неравенству, материальная
точка приближается к положению равновесия,
проходит его (рис. 7.6, кривая 2) и отклоняется
в противоположную сторону и затем
асимптотически приближается к положению
равновесия (больше не переходя через
него).
|
|
Рис. 7.6. Апериодические колебания |
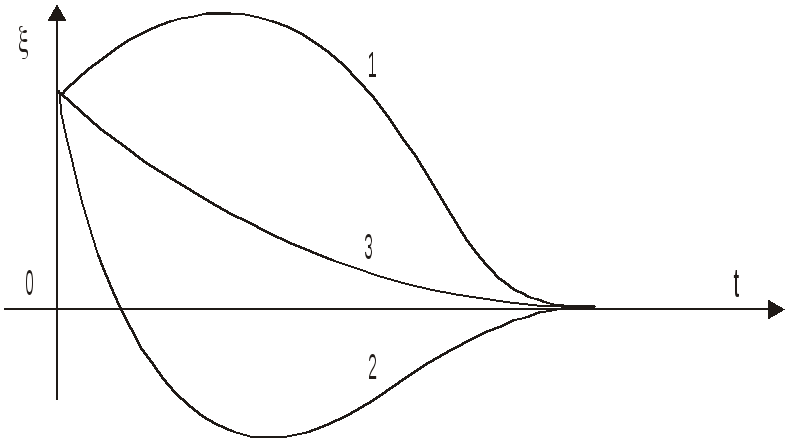
При
х0
>0
и V0<0
(и![]() ),
т. е. когда в начальный момент материальная
точка смещена из положения равновесия
в положительном направлении оси и
отпущена без начальной скорости либо
ей сообщена в противоположном направлении
начальная скорость, модуль которой
удовлетворяет указанному неравенству,
материальная точка асимптотически
приближается к положению равновесия,
не переходя через него (кривая 3, на рис.
7.6).
),
т. е. когда в начальный момент материальная
точка смещена из положения равновесия
в положительном направлении оси и
отпущена без начальной скорости либо
ей сообщена в противоположном направлении
начальная скорость, модуль которой
удовлетворяет указанному неравенству,
материальная точка асимптотически
приближается к положению равновесия,
не переходя через него (кривая 3, на рис.
7.6).
С. Предельный случай ( = k).
Материальная точка совершает апериодическое движение в соответствии с уравнением
![]() .
.
При
t
смещение х становится неопределенным:
0.
Раскрытие неопределенности по правилу
Лопиталя указывает, что
![]() ,
что говорит о затухании движения.
,
что говорит о затухании движения.
Характер
затухания зависит от начальных условий
движения. При х0
0 и V0>0
движение маятника соответствует кривой
1 на рисунке 7.6. При х0
>0
и V0<0
(при
![]() )
движение соответствует кривой 2. Приx0>0
и V0<0
(причем |х0|<х0)
движение соответствует кривой 3.
)
движение соответствует кривой 2. Приx0>0
и V0<0
(причем |х0|<х0)
движение соответствует кривой 3.