


dA |
= |
dAx |
||
|
|
|
||
dt |
||||
|
dt прx |
|
||
dA |
= |
dAy |
||
|
|
|
||
dt |
||||
|
dt прy |
|
||
dA |
= |
dAz |
||
|
|
dt |
||
|
dt прz |
|
||
,
, (2.11)
.
Нужно быть очень аккуратным в обозначениях. Так, например, проекцию вектора dA/dt на
dA
ось х нельзя обозначить символом dt x , потому что такой символ по
аналогии с Ах будет означать составляющую вектора dA/dt по оси х. Нельзя также обозначать
|
|
|
|
|
|
|
dA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
эту проекцию символом |
|
dt x |
(подобно обозначению проекции вектора А символом Ах), так |
||||||||||||
|
|
||||||||||||||
|
|
|
dA |
|
вообще говоря, отличен от |
|
|
dA |
|
. Поэтому приходится прибегать к обозначениям вида |
|||||
|
|
|
|
|
|
||||||||||
как |
|
dt |
|
|
|
|
dt |
|
|
||||||
|
|
|
|
||||||||||||
dA |
|
|
|
|
|
|
|
|
|
|
|
||||
|
dt прx |
|
и т. д. |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
§3. Скорость
Положение материальной точки (в дальнейшем для краткости мы будем говорить просто точки) в пространстве можно задать с помощью радиуса-вектора r.
При движении точки вектор r изменяется, вообще говоря, и по величине, и по направлению1.
Зафиксируем некоторый момент времени t. Ему соответствует значение г радиуса-вектора
(рис. 16).
Рис.16
В течение следующего за моментом t небольшого промежутка времени ∆t (мы будем называть его элементарным) точка проходит элементарный путь ∆s и получает элементарное перемещение ∆r, которое совпадает с приращением радиуса-вектора за время ∆t2.
1Рекомендуется в порядке упражнения указать траекторию, для которой радиус-вектор точки изменяется: а) только по величине, б) только по направлению
2Символом ∆ (дельта) мы будем пользоваться в двух случаях: Символом ∆ (дельта) мы будем пользоваться в двух случаях:
16
Образуем отношение
r
(3.1)
t
При данном t модуль и направление вектора (3.1), вообще говоря, зависят от величины промежутка ∆t. Станем уменьшать ∆t (соответственно будут также уменьшаться ∆s и ∆r), наблюдая при этом за поведением отношения (3.1). Оказывается, что по достижении достаточно малых значений ∆t вектор (3.1) практически перестает изменяться как по величине, так и по направлению. Это означает, что при стремлении ∆t к нулю отношение (3.1) стремится к определенному пределу. Этот предел называется скоростью v движущейся точки в момент времени t. Символически сказанное выше записывается следующим образом:
v = lim |
r |
(3.2) |
t→0 |
t |
|
Итак, скоростью называется предел, к которому стремится отношение ∆r к ∆t при неограниченном убывании ∆t. Следовательно, скорость можно определить как производную радиуса-вектора движущейся точки по времени:
v = dr |
(3.3) |
dt |
|
Как следует из ее определения, скорость есть величина векторная.
Рис.17
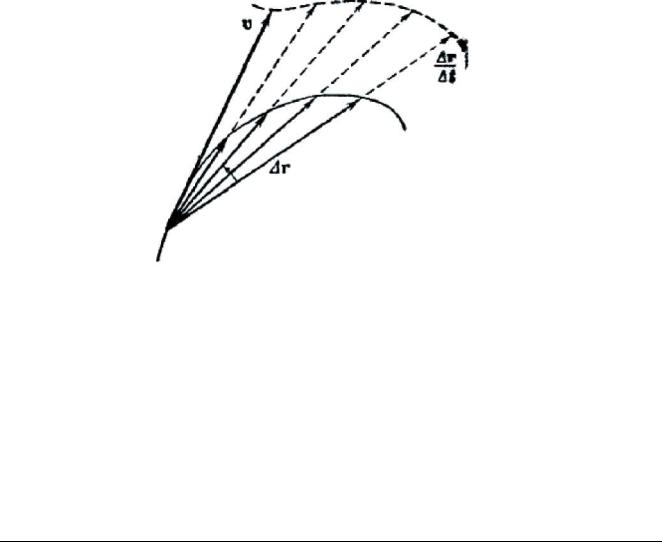
Из рис. 17 видно, что вектор ∆r/∆t является секущей для траектории. При предельном переходе (3.2) точки пересечения этого вектора с траекторией все более сближаются (∆s стремится к нулю), сливаясь в конечном итоге в одну точку, вследствие чего секущая превращается в касательную. Таким образом, вектор скорости оказывается направленным по касательной к траектории в соответствующей точке (рис. 18).
В соответствии с формулой (3.2) модуль вектора скорости может быть записан следующим образом:
υ = |
|
v |
|
= |
|
lim |
r |
|
= lim |
r |
(3.4) |
|
|
|
|
|
|||||||||
|
|
|
||||||||||
|
||||||||||||
t |
t |
|||||||||||
|
|
|
|
|
|
t→0 |
|
t→0 |
|
|||
|
|
|
|
|
В этом выражении нельзя вместо |∆r| писать ∆r. Символ |∆r| означает модуль приращения сектора r,
a)для обозначения доли какой-либо величины. Например, в рассматриваемом случае ∆t есть часть всего времени в течение которого происходит движение, ∆s — часть всего пути, проходимого точкой;
b)для обозначения приращения какой-либо величины. В данном случае ∆r есть приращение радиуса-вектора r за время ∆t
17

Рис.18 |
Рис.19 |
в то время как ∆r представляет собой приращение модуля вектора r: ∆|r|. Обе эти величины не равны друг другу:
r ≠ r = r
В этом можно убедиться на следующем примере (рис. 19). Пусть некоторый вектор А получает такое приращение ∆А, что модуль его не изменяется;
A + A = A
Следовательно, приращение модуля вектора А равно нулю (∆|А|=∆A=0). В то же время модуль приращения вектора |∆A| отличен от нуля (он равен длине отрезка 2 — 3). Рис. 20 поясняет, что при данном |∆А| приращение модуля ∆|А| может иметь значение в пределах от —
|∆А| до +|∆А
Рис.20
Элементарный путь ∆s, вообще говоря, отличен по величине от модуля элементарного перемещения |∆r| (рис 21).
Рис.21
Однако, если брать отрезки пути ∆s и перемещения ∆r, соответствующие небольшим промежутка у времени ∆t, то различие между ∆s и |∆r| будет невелико, причем при уменьшения ∆t путь ∆s с возрастающей точностью будет совпадать с |∆r|. Па этом основании можно написать, что
18

lim |
r |
= lim |
s |
|
|
||||
t |
t |
|||
t→0 |
t→0 |
откуда в соответствии с (3.4) для модули скорости получается следующая формула:
υ = lim |
s |
= ds |
(3.5) |
t→0 |
t |
dt |
|
§4. Вычисление пройденного пути
Из выражения (3.5) следует, что при малых ∆t
υ |
s |
(4.1) |
|
t |
|||
|
|
Последнее приближенное равенство выполняется тем точнее, чем меньше ∆t. Если известна величина скорости v как функция времени t, можно вычислить путь, пройденный точкой с момента t1 до момента t2. Для этого разобьем промежуток времени t1-t2 на N малых промежутков: ∆t1, ∆t2, …, ∆tN, которые могут быть различными по величине. Весь путь s, пройденный точкой, можно представить как сумму путей: ∆s1, ∆s2, …, ∆sN пройденных за соответствующие промежутки времени ∆t;
|
N |
|
s = s1 + s2 |
+ ...+ sN = ∑ si |
1 |
|
i=1 |
|
|
|
В соответствии с (4.1) каждое из слагаемых ∆sі (і — любое число от 1 до N) может быть приближенно представлено в виде
si υi ti
где ∆tі — промежуток времени, за который был пройден ∆sі, a vi — одно из значений скорости за время ∆tі. Таким образом,
N |
|
|
|
s ∑υi |
ti |
(4.2) |
|
i =1 |
|
|
|
Написанное равенство выполняется тем точнее, чем меньше промежутки времени. В |
|
||
пределе при стремлении всех ∆tі к нулю (количество промежутков ∆tі будет при этом |
|
||
неограниченно возрастать) сумма, стоящая справа, станет точно равна s: |
|
||
s = limt →0 |
N |
|
|
∑υi |
ti |
(4.3) |
|
i |
i=1 |
|
|
Скорость есть функция времени: υ=υ(t). В математике выражения вида:
N
limx 0 ∑ f (xi ) xi
i → i=1
составленное для значений х, заключенных в пределах от а до b, называют определенным интегралом и записывают символически следующим образом;
∫b f (x)dx
a
Следовательно, путь, пройденный точкой за промежуток времени от t1 до t2 равен определенному интегралу
|
t2 |
|
( |
) |
(4.4) |
s = |
∫ |
υ |
|||
|
|
t dt |
|
||
|
t1 |
|
|
|
|
1 Так принято записывать сумму N слагаемых одинакового вида.
19