

- •Часть 1. Физические основы механики
- •Введение
- •Глава I. Кинематика
- •§1. Перемещение точки. Векторы и скаляры
- •§2. Некоторые сведения о векторах
- •§3. Скорость
- •§4. Вычисление пройденного пути
- •§5. Равномерное движение
- •§6. Проекции вектора скорости на координатные оси
- •§7. Ускорение
- •§8. Прямолинейное равнопеременное движение
- •§9. Ускорение при криволинейном движении
- •§10. Кинематика вращательного движения
- •§11. Связь между векторами v и ω
- •Глава II. Динамика материальной точки
- •§12. Классическая механика. Границы ее применимости
- •§13. Первый закон Ньютона. Инерциальные системы отсчета
- •§14. Второй закон Ньютона
- •§15. Единицы измерения и размерности физических величин
- •§16. Третий закон Ньютона
- •§17. Принцип относительности Галилея
- •§18. Сила тяжести и вес
- •§19. Силы трения
- •§20. Силы, действующие при криволинейном движении
- •§21. Практическое применение законов Ньютона
- •§22. Импульс
- •§23. Закон сохранения импульса
- •Глава III. Работа и энергия
- •§24. Работа
- •§25. Мощность
- •§26. Потенциальное поле сил. Силы консервативные и неконсервативные
- •§27. Энергия. Закон сохранения энергии
- •§28. Связь между потенциальной энергией и силой
- •§29. Условия равновесия механической системы
- •§30. Центральный удар шаров
- •Глава IV. Неинерциальные системы отсчета
- •§31. Силы инерции
- •§32. Центробежная сила инерции
- •§33. Сила Кориолиса
- •Глава V. Механика твердого тела
- •§34. Движение твердого тела
- •§35. Движение центра инерции твердого тела
- •§36. Вращение твердого тела. Момент силы
- •§37. Момент импульса материальной точки» Закон сохранения момента импульса
- •§38 Основное уравнение динамики вращательного движения
- •§39. Момент инерции
- •§40. Кинетическая энергия твердого тела.
- •§41. Применение законов динамики твердого тела
- •§42. Свободные оси. Главные оси инерции
- •§43 Момент импульса твердого тела
- •§44. Гироскопы
- •§45. Деформации твердого тела
- •Глава VI. Всемирное тяготение
- •§46. Закон всемирного тяготения
- •§47. Зависимость ускорения силы тяжести от широты местности
- •§48. Масса инертная и масса гравитационная
- •§49. Законы Кеплера
- •§50. Космические скорости
- •Глава VII. Статика жидкостей и газов
- •§51. Давление
- •§52. Распределение давления в покоящихся жидкости и газе
- •§53. Выталкивающая сила
- •Глава VIII. Гидродинамика
- •§54. Линии и трубки тока. Неразрывность струи
- •§55. Уравнение Бернулли
- •§56. Измерение давления в текущей жидкости
- •§57. Применение к движению жидкости закона сохранения импульса
- •§58. Силы внутреннего трения
- •§59. Ламинарное и турбулентное течение
- •§60. Движение тел в жидкостях и газах
- •Часть 2. Колебания и волны
- •Глава IX. Колебательное движение
- •§61. Общие сведения о колебаниях
- •§62. Гармонические колебания
- •§63. Энергия гармонического колебания
- •§64. Гармоническим осциллятор Систему, описываемую уравнением
- •§65. Малые колебания системы вблизи положения равновесия
- •§66. Математический маятник
- •§67. Физический маятник
- •§68. Графическое изображение гармонических колебаний. Векторная диаграмма
- •§69. Сложение колебаний одинакового направления
- •§70. Биения
- •§71. Сложение взаимно перпендикулярных колебаний
- •§72. Фигуры Лиссажу
- •§73. Затухающие колебания
- •§74. Автоколебания
- •§75. Вынужденные колебания
- •§76. Параметрический резонанс
- •Глава X. Волны
- •§77. Распространение волн в упругой среде
- •§78. Уравнения плоской и сферической волн
- •§79. Уравнение плоской волны, распространяющейся в произвольном направлении
- •§80. Волновое уравнение
- •§81 Скорость распространения упругих волн
- •§82. Энергия упругой волны
- •§83. Интерференция и дифракция воли
- •§84. Стоячие волны
- •§85. Колебания струны
- •§86. Эффект Допплера
- •§87. Звуковые волны
- •§88. Скорость звуковых волн в газах
- •§89. Шкала уровней силы звука
- •§90. Ультразвук
- •Часть 3. Молекулярная физика и термодинамика
- •Глава ХI. Предварительные сведения
- •§91. Молекулярно-кинетическая теория (статистика) и термодинамика
- •§92. Масса и размеры молекул
- •§93. Состояние системы. Процесс
- •§94. Внутренняя энергия системы
- •§95. Первое начало термодинамики
- •§96. Работа, совершаемая телом при изменениях его объема
- •§97. Температура
- •§98. Уравнение состояния идеального газа
- •Глава XII. Элементарная кинетическая теория газов
- •§99. Уравнение кинетической теории газов для давлений
- •§100. Строгий учет распределения скоростей молекул по направлениям
- •§101. Равнораспределение энергии по степеням свободы
- •§102. Внутренняя энергия и теплоемкость идеального газа
- •§103. Уравнение адиабаты идеального газа
- •§104. Политропические процессы
- •§105. Работа, совершаемая идеальным газом при различных процессах
- •§106. Распределение молекул газа по скоростям
- •§107. Экспериментальная проверка закона распределения Максвелла
- •§108. Барометрическая формула
- •§109. Распределение Больцмана
- •§110. Определение Перреном числа Авогадро
- •§111. Средняя длина свободного пробега
- •§112. Явления переноса. Вязкость газов
- •§113. Теплопроводность газов
- •§114. Диффузия & газах
- •§115. Ультраразреженные газы
- •§116. Эффузия
- •Глава ХIII. Реальные газы
- •§117. Отклонение газов от идеальности
- •§118. Уравнение Ван-дер-Ваальса
- •§119. Экспериментальные изотермы
- •§120. Пересыщенный пар и перегретая жидкость
- •§121. Внутренняя энергия реального газа
- •§122. Эффект Джоуля-Томсона
- •§123. Ожижение газов
- •Глава XIV. Основы термодинамики
- •§124. Введение
- •§125. Коэффициент полезного действия тепловой машины
- •§126. Второе начало термодинамики
- •§127. Цикл Карно
- •§128. Коэффициент полезного действия обратимых и необратимых машин
- •§129. К.п.д. цикла Карно для идеального газа
- •§130. Термодинамическая шкала температур
- •§131. Приведенное количество тепла. Неравенство Клаузиуса
- •§132. Энтропия
- •§133. Свойства энтропии
- •§134. Теорема Нернста
- •§135. Энтропия и вероятность
- •§136. Энтропия идеального газа
- •Глава XV. Кристаллическое состояние
- •§137. Отличительные черты кристаллического состояния
- •§138. Классификация кристаллов
- •§139. Физические типы кристаллических решеток
- •§140. Тепловое движение в кристаллах
- •§141. Теплоемкость кристаллов
- •Глава XVI. Жидкое состояние
- •§142. Строение жидкостей
- •§143. Поверхностное натяжение
- •§144. Давление под изогнутой поверхностью жидкости
- •§145. Явления на границе жидкости и твердого тела
- •§146. Капиллярные явления
- •Глава XVII. Фазовые равновесия и превращения
- •§147. Введение
- •§148. Испарение и конденсация
- •§149. Плавление и кристаллизация
- •§150. Уравнение Клапейрона—Клаузиуса
- •§151. Тройная точка. Диаграмма состояния
- •Предметный указатель
|
v |
|
> |
|
x |
|
(β + β 2 |
− ω 2 ). |
|
|
|
|
|||||
|
0 |
|
|
|
0 |
|
|
0 |
§74. Автоколебания
При затухающих колебаниях энергия системы расходуется на преодоление сопротивления среды. Если восполнять эту убыль энергии, колебания станут незатухающими. Пополнение энергии системы может осуществляться за счет толчков извне, одна ко эти толчки должны сообщаться системе В такт с ее колебания ми, в противном случае они могут ослабить колебания и даже прекратить их совсем. Можно сделать так, чтобы колеблющаяся система сама управляла внешним воздействием, обеспечивая согласованность сообщаемых ей толчков со своим движением. Такая система называется автоколебательной» а совершие незатухающие колебания — автоколебаниям и.
В качестве одной из простейших автоколебательных систем рассмотрим устройство, изображенное на рис. 185. Гибкая упругая линейка зажата одним концом неподвижно. Если оттянуть свободный конец линейки
Рис. 185
затухающие колебания. Колебания можно сделать незатухающими, направив на конец линейки струйку воды так, чтобы струйка задевала линейку в тот момент, когда она находится в верхнем крайнем положении. Удары струйки о конец линейки восполняют убыль энергии колебаний, обусловленную трением.
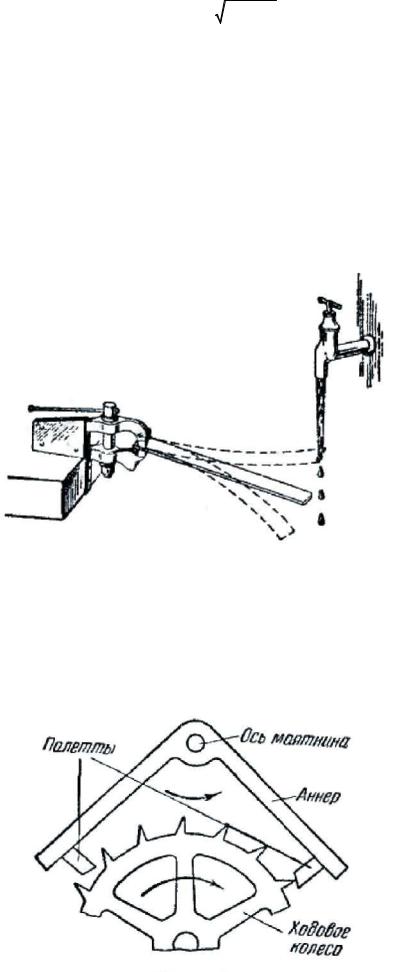
В качестве второго примера автоколебательной системы рассмотрим часовой механизм. Маятник часов насажен на одну ось с изогнутым рычагом — анкером (рис. 186).
188

Рис. 186
На концах анкера имеются выступы специальной формы, называемые палеттами. Зубчатое ходовое колесо находится под воздействием цепочки с гирей или закрученной пружины, которые стремятся повернуть его по часовой стрелке. Однако большую часть времени колесо упирается одним из зубьев в боковую поверхность той либо иной палетты, скользящей при качании маятника по поверхности зуба. Только в моменты, когда маятник находится вблизи среднего положения, палетты перестают преграждать путь зубьям и ходовое колесо проворачивается, толкая анкер зубом, скользящим своей вершиной по скошенному торцу палетты. За полный цикл качаний маятника (за период) ходовое колесо проворачивается на два зуба, причем каждая из палетт получает по толчку. Через посредство этих толчков за счет энергии поднятой гири или закрученной пружины и восполняется убыль энергии маятника, возникающая вследствие трения.
§75. Вынужденные колебания
Вынужденными называются такие колебания, которые возникают в колебательной системе под действием внешней периодически изменяющейся силы (мы будем называть ее вынуждающей силой). Пусть вынуждающая сила изменяется со временем по гармоническому закону
f = F0 cosωt. |
(75.1) |
При составлении уравнения движения нужно учесть, кроме вынуждающей силы, также те силы, которые действуют в системе при свободных колебаниях, т, е. квазиупругую силу и силу сопротивления среды. Предполагая колебания достаточно малыми, будем по-прежнему считать силу сопротивления пропорциональной скорости. Тогда уравнение движения запишется следующим образом
mx = −kx − rx + F0 cosωt.
Разделив это уравнение на m и перенеся члены с х и x х в левую часть, получим неоднородное линейное дифференциальное уравнение второго порядка:
|
|
|
|
x + 2β x + ω02 x = f0 cosωt, |
(75.2) |
||
где f0 = |
F0 |
, β = |
r |
— коэффициент затухания, ω0 = |
k |
собственная частота колебаний |
|
m |
2m |
m |
|
||||
|
|
|
|
|
|||
системы.
Как известно из теории дифференциальных уравнений, общее решение неоднородного уравнения равно сумме общего решения соответствующего однородного уравнения и частного решения неоднородного уравнения. Общее решение однородного уравнения мы уже знаем [см. функцию (73.10), являющуюся общим решением уравнения (73.2)]. Оно имеет вид
x = a0e− β t cos(ω 't + α '), |
(75.3) |
где ω ' = ω02 − β 2 , a0,α ' — произвольные постоянные. Остается найти частное (не содержащее
произвольных постоянных) решение уравнения (75.2), Предположим, что это решение имеет вид
x = a cos(ωt − ϕ ) |
(75.4) |
(в данном случае удобно обозначить начальную фазу вместо а через —ϕ ). С помощью
векторной диаграммы (см. §68 и 69) легко убедиться в том, что наше предположение справедливо, а также определить значения а и (р, при которых функция (75.4) удовлетворяет уравнению (75.2). Дифференцируя (75.4) по времени, первые два члена уравнения (75.2) можно представить в следующем виде:
2βx = −2βωa sin(ωt − ϕ ) = 2βωa cos |
ωt − ϕ + |
π , |
(75.5) |
|
|
|
|
|
|
2 |
|
189

x = −ω 2a cos(ωt − ϕ ) = ω 2a cos(ωt − ϕ + π ). |
(75.6) |
Как следует из (75.2), гармоническое колебание f0 cosωt является суммой трех гармонических колебаний той же частоты: колебания (75.6), колебания (75.5) и колебания ω02 x = ω02a cos(ωt − ϕ ). Если изобразить последнее колебание вектором длины ω02a , направленным
a) |
б) |
|
Рис. 187. |
вправо (рис. 187), то колебание (75.5) изобразится вектором длины 2βωa , повернутым |
|
относительно вектора ω02 x против часовой стрелки на угол π / 2, а колебание (75.6) —
вектором длины ω 2a повернутым относительно вектора ω02 x на угол π . Чтобы уравнение
(75.2) было удовлетворено, векторная сумма перечисленных трех векторов должна совпадать с |
||||
вектором, изображающим колебание f0 cosωt . Такое совпадение возможно лишь при |
|
|||
значении амплитуды я, которое определяется условием (см, рис. 187, а) |
|
|||
(ω02 − ω 2 )2 a2 + 4β 2ω 2a2 = f02 |
|
|||
откуда |
|
|
|
|
a = |
f02 |
. |
(75.7) |
|
(ω02 − ω 2 )2 |
||||
|
+ 4β 2ω 2 |
|
||
Рис. 187, а отвечает случаю ω < ω0 . Из рис. 187, 6, соответствующего случаюω > ω0 получается такое же значение а.
Рис. 187 позволяет получить также и значение ϕ , которое представляет собой величину
отставания по фазе вынужденного колебания (75.4) от обусловившей его вынуждающей силы (75.1). Из рисунка следует, что
tgϕ = |
2βω |
(75.8) |
|
ω02 − ω 2 |
|||
|
|
Подставив в (75.4) значения а и ϕ определяемые формулами (75.7) и (75.8), получим частное решение неоднородного уравнения (75.2):
190
|
|
f0 |
|
|
|
2βω |
|
|
|
x = |
|
|
|
ωt − arctg |
|
(75.9) |
|||
(ω02 |
2 |
cos |
2 |
|
2 . |
||||
|
− ω 2 ) |
+ 4β 2ω 2 |
|
|
ω0 |
− ω |
|
|
|
Функция (75.9) в сумме с (75.3) дает общее решение уравнения (75.2), описывающее поведение системы при вынужденных колебаниях. Слагаемое (75.3) играет заметную роль только в начальной стадии процесса, при так называемом установлении колебаний (рис. 188)
Рис. 188.
С течением времени из-за экспоненциального множителя e− βt роль слагаемого (75.3) все больше уменьшается, и по прошествии достаточного времени им можно пренебречь, сохраняя в решении лишь слагаемое (75.9).
Таким образом, функция (75.9) описывает установившиеся вынужденные колебания. Они представляют собой гармонические колебания с частотой, равной частоте вынуждающей силы. Амплитуда (75.7) вынужденных колебаний пропорциональна амплитуде вынуждающей силы.
Для данной колебательной системы (определенных ω0 и β ) амплитуда зависит от частоты
вынуждающей силы. Вынужденные колебания отстают по фазе от вынуждающей силы, причем величина отставания ϕ так же зависит от частоты вынуждающей силы [см. (75.8)].
Зависимость амплитуды вынужденных колебаний от частоты вынуждающей силы приводит к тому» что при некоторой определенной для данной системы частоте амплитуда колебаний достигает максимального значения, Колебательная система оказывается особенно отзывчивой на действие вынуждающей силы при этой частоте. Это явление называется резонансом, а соответствующая частота — резонансной частотой.
Чтобы определить резонансную частоту ω рез, нужно найти максимум функции (75.7) или,
что то же самое, минимум выражения, стоящего под корнем в знаменателе. Продифференцировав это выражение по ω и приравняв нулю, мы получим условие,
определяющее ω рез:
− 4(ω02 − ω 2 )ω + 8β 2ω = 0. |
(75.10) |
Уравнение (75.10) имеет три решения: ω = 0 и ω = ± ω02 − 2β 2 . Решение равное
кулю, соответствует максимуму знаменателя. Из остальных двух решений отрицательное должно быть отброшено, как не имеющее физического смысла (частота не может быть отрицательной). Таким образом, для резонансной частоты получается одно значение:
191

ω рез = ω02 − 2β 2 . |
(75.11) |
Подставив это значение частоты в (75.7), получим выражение для амплитуды при резонансе:
a рез = |
f0 |
. |
(75.12) |
|
ω02 |
||||
2β |
− β 2 |
|
Из (75.12) следует, что при отсутствии сопротивления среды амплитуда при резонансе обращалась бы в бесконечность. Согласно (75.11) резонансная частота при тех же условиях
(при β = 0) совпадает с собственной частотой колебаний системы ω0 .
Зависимость амплитуды вынужденных колебаний от частоты вынуждающей силы (или, что то же caмое, от частоты колебаний) показана графически па рис, 189. Отдельные кривые на
графике соответствуют различным значениям параметра β . В соответствии с (75.11) и (75.12), чем меньше β , тем выше и правее лежит максимум данной кривой. При очень большом
затухании (таком, что 2β 2 > ω02 ) выражение для резонансной частоты становится мнимым.
Это означает, что при этих условиях резонанс не наблюдается — с увеличением частоты амплитуда вынужденных колебаний монотонно убывает (см. нижнюю кривую на рис. 189). Изображенная на
Рис. 189.
рис. 189 совокупность графиков функции (75.7), соответствующих различным значениям параметра β , называется резонансными кривыми.
По поводу резонансных кривых можно сделать еще следующие замечания. При стремлении ω к нулю все кривые приходят к одному и тому же, отличному от нуля, предельному
значению, равному f0 /ω02 , т. е. F0/k. Это значение представляет собой смещение из
положения равновесия, которое получает система под действием постоянной силы величины F0. При стремлении ω к бесконечности все кривые асимптотически стремятся к нулю, так как при большой частоте сила так быстро изменяет свое направление, что система не успевает заметно
сместиться из положения равновесия. Наконец, отметим, что чем меньше β , тем сильнее изменяется c частотой амплитуда вблизи резонанса, тем «острее» получается максимум.
192

Из формулы (75.12) вытекает, что при малом затухании (т. е. при β << ω0 ) амплитуда при резонансе приближенно равна
aрез ≈ |
f0 |
. |
|
||
|
2βω0 |
|
Разделим это выражение на смещение xq из положения равновесия иод действием
постоянной силы F0, равное, как мы выяснили, |
f0 /ω02 . В результате получим: |
||||||||
|
aрез |
≈ |
ω |
0 |
= |
2π |
= |
π |
= Q |
|
x |
|
2βT |
λ |
|||||
|
|
2β |
|
|
|
||||
0 |
|
|
|
|
|
|
|
|
|
[см. формулу (73.13)]. Таким образом, добротность Q показывает, во сколько раз амплитуда в момент резонанса превышает смещение системы из положения равновесия под действием постоянной силы той же величины, что и амплитуда вынуждающей силы (это справедливо лишь при небольшом затухании).
Рис. 190.
Как видно из рис. 187, вынужденные колебания отстают по фазе от вынуждающей силы, причем величина отставания ϕ лежит в пределах от 0 до ϕ . Зависимость ϕ от ω при разных
значениях β показана графически на рис. 190. Частоте соответствует ϕ = π / 2. Резонансная частота меньше собственной [см. (75.11)]. Следовательно, в момент резонансаϕ < π / 2 . При слабом затухании ω рез ≈ ω0 , 0 значение ϕ при резонансе, можно считать равным π / 2.
С явлением резонанса приходится считаться при конструировании машин и различного рода сооружении. Собственная частота колебании этих устройств ни в коем случае не должна быть близка к частоте возможных внешних воздействий. Так, например, собственная частота вибраций корпуса корабля или крыльев самолета должна сильно отличаться от частоты колебаний, которые могут быть возбуждены вращением гребного винта или пропеллера. В противном случае возникают вибрации, которые могут вызвать катастрофу. Известны случаи, когда обрушивались мосты при прохождении по ним марширующих колонн солдат. Это происходило потому, что собственная частота колебаний моста оказывалась близкой к частоте с которой шагала колонна.
193