

Действия рлс при включении аппаратуры защиты в условиях отсутствия пп
При
отсутствии
![]() =
0, поэтому уравнение (2.44) в рассматриваемом
случае будет иметь вид
=
0, поэтому уравнение (2.44) в рассматриваемом
случае будет иметь вид
![]() (2.48)
(2.48)
где
![]() —дальность
действия РЛС при включенной аппаратуре
защиты и отсутствии ПП.
—дальность
действия РЛС при включенной аппаратуре
защиты и отсутствии ПП.
Так
как
![]() (по
крайней мере, в аналоговыхсистемах
СДЦ), то отношение (2.48) свидетельствует
о снижении дальности
действия РЛС при включенной аппаратуре
защиты от ПП
и при отсутствии ПП. Так, например, даже
при
(по
крайней мере, в аналоговыхсистемах
СДЦ), то отношение (2.48) свидетельствует
о снижении дальности
действия РЛС при включенной аппаратуре
защиты от ПП
и при отсутствии ПП. Так, например, даже
при
![]() =
0 дБ включение системы
СДЦ на базе устройств череспериодной
компенсации
с двукратным вычитанием при отсутствии
ПП приводит к
снижению дальности действия РЛС на 22
%. Это обстоятельство подчеркивает
настоятельную необходимость применения
в РЛС устройств,
обеспечивающих автоматическое
переключение режимов
ее работы.
=
0 дБ включение системы
СДЦ на базе устройств череспериодной
компенсации
с двукратным вычитанием при отсутствии
ПП приводит к
снижению дальности действия РЛС на 22
%. Это обстоятельство подчеркивает
настоятельную необходимость применения
в РЛС устройств,
обеспечивающих автоматическое
переключение режимов
ее работы.
Примечание.
Требуемое
отношение сигнал—шум на входе
устройства сравнения
с порогом
![]() в
общем случае должно определяться по
специальным
кривым обнаружения. Однако при вероятности
обнаружения цели, равной
0,5, с достаточной для практики точностью,
можно пользоваться обычными кривыми
обнаружения (см. гл. 4).
в
общем случае должно определяться по
специальным
кривым обнаружения. Однако при вероятности
обнаружения цели, равной
0,5, с достаточной для практики точностью,
можно пользоваться обычными кривыми
обнаружения (см. гл. 4).
2.5. Дальность обнаружения маловысотных целей
На
дальность обнаружения маловысотных
(МВЦ) целей существенное влияние
оказывают отражения от земной поверхности.
При
наличии отражений дальность обнаружения
цели, находящейся
под углом места
![]() ,
определяется следующим образом:
,
определяется следующим образом:
![]() (2.49)
(2.49)
где
![]() —
дальность обнаружения цели при
отсутствии отражений
(полагаем, что зона обзора в свободном
пространстве изодальностная);
—
дальность обнаружения цели при
отсутствии отражений
(полагаем, что зона обзора в свободном
пространстве изодальностная);
![]() —
множитель Земли.
Для
интересующих нас в рассматриваемом
случае малых углов места
земную поверхность можно считать
электрически гладкой. Поэтому
в (2.49) множитель Земли [3] будет
—
множитель Земли.
Для
интересующих нас в рассматриваемом
случае малых углов места
земную поверхность можно считать
электрически гладкой. Поэтому
в (2.49) множитель Земли [3] будет
![]() (2.50),
(2.50),
где
![]() —
разность хода
прямой и отраженной волн от антенны
РЛС до цели.
—
разность хода
прямой и отраженной волн от антенны
РЛС до цели.
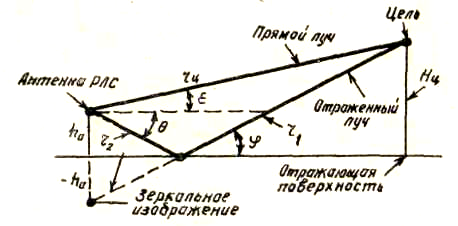
Рис. 2.4. Геометрия отражений от плоской земной поверхности
В теории радиолокации маловысотными принято называть цели, для которых выполняется условие
![]()
поэтому с учетом выражений (2.49) и (2.50)
![]() (2.51)
(2.51)
Разность
хода
![]() для
плоской земной поверхности можно найти,
пользуясь рис. 2.4:
для
плоской земной поверхности можно найти,
пользуясь рис. 2.4:![]()
![]()
Учитывая,
что
![]() последнее
выражение можно упростить:
последнее
выражение можно упростить:
![]()
Из рис. 2.4 видно, что
![]()
поэтому
![]() (2.52)
(2.52)
Для
нахождения разности хода волн с учетом
кривизны земной
поверхности требуется решить кубическое
уравнение. В работе
[6] рассмотрен метод, упрощающий вычисления.
Он предусматривает
использование в формуле (2.52) поправочного
коэффициента
![]() ,
определяемого параметрами
,
определяемого параметрами
![]() и
и
![]() :
:
![]()
где
![]() —дальность
до цели, км;
—дальность
до цели, км;
![]() — высота
подъема фазового центра антенны РЛС
от
носительно
участка земной поверхности,
принимающего
участие
в формировании отраженной волны, м;
— высота
подъема фазового центра антенны РЛС
от
носительно
участка земной поверхности,
принимающего
участие
в формировании отраженной волны, м;
![]() — высота
полета цели, м;
— высота
полета цели, м;
![]() — дальность
прямой видимости, км.
— дальность
прямой видимости, км.
В
зависимости от величины параметров
![]() и
и
![]() по
семейству графиков
(рис. 2.5) находится поправочный коэффициент
по
семейству графиков
(рис. 2.5) находится поправочный коэффициент
![]() и
разность
хода прямой и отраженной волн определяется
как
и
разность
хода прямой и отраженной волн определяется
как
![]() (2.53)
(2.53)
С учетом (2.51) и (2.53) можно записать уравнение, определяющее дальность обнаружения МВЦ:
![]() (2.54)
(2.54)
Уравнение
(2.54) является трансцендентным и его
можно решить
либо графическим, либо итерационным
методом. В случае обнаружения
цели в условиях мешающих отражений от
подстилающей
поверхности, в (2.54) вместо
![]() нужно подставлять
нужно подставлять
![]() ,
найденное
из уравнения (2.44).
,
найденное
из уравнения (2.44).
Как следует из соотношения (2.54), зависимость дальности обнаружения МВЦ от технических параметров РЛС гораздо слабее, чем зависимость дальности обнаружения целей в свободном пространстве. Наиболее целесообразными способами увеличения дальности обнаружения МВЦ являются увеличение высоты подъема фазового центра антенны и переход на более короткие волны при одновременном увеличении коэффициента подавления пассивных помех.
Условия, на основании которых было получено соотношение (2.54), на практике часто не выполняются. Поэтому реальные возможности РЛС по обнаружению МВЦ должны уточняться путем ее облета на малых высотах.
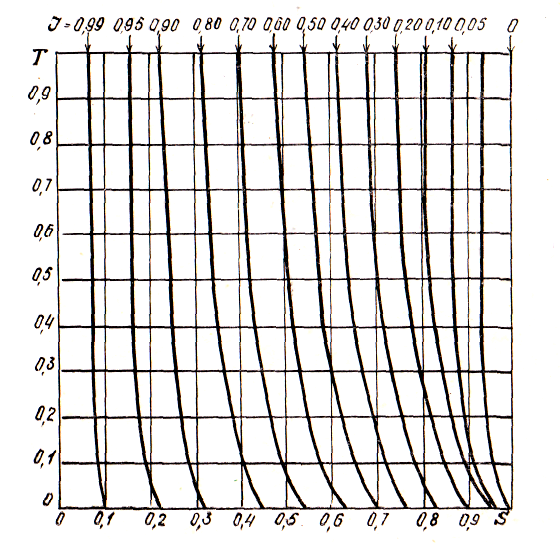
Рис.
2.5. Зависимость поправочного коэффициента
![]() от
параметров
от
параметров
![]() и
и
![]()