

12.2.4. Динамическая ошибка
Динамическая ошибка обусловлена изменением дальности до цели за время съёма, определяемого как интервал времени от начала облучения цели до ввода в канал связи информации о её дальности.
Это изменение дальности Δrдин = υr tc = υц tc cos q, где υr — радиальная составляющая скорости цели;
q— ракурс цели (угол между направлением на цель и направлением ее движения); tc — среднее время съёма. Оно примерно равно: при визуальном съёме —5 с, при полуавтоматическом — 2 ... 3 с, при автоматическом — 0с.
При равновероятном ракурсе цели (р (q) = 1/2π) средняя квадратическая ошибка измерения дальности
![]()
и в зависимости от скорости цели может при визуальном съёме достигать значений 1 ... 2 км и более.
Эффективной мерой снижения этой ошибки является использование полуавтоматического и автоматического съёма координат.
12.3. Ошибки измерения угловых координат и технические решения, обеспечивающие их снижение
12.3.1. Потенциальная ошибка
Потенциальная ошибка измерения угловой координаты определяется формой и шириной диаграммы направленности антенны в соответствующей плоскости, отношением сигнал—шум на входе измерителя и способом измерения координаты.
![]()
где Θ0,5Р — ширина ДН антенны; к — коэффициент пропорциональности, зависящий от формы ДН и способа измерения Θ.
Числовое значение коэффициента к составляет; к = 0,4 ...0,6 — при измерении углового положения цели методом линейного сканирования антенного луча (используется при измерении азимута в обзорных РЛС и угла места в радиовысотомерах); к — 0.6...1 — при измерении Θ методом парциальных диаграмм (в трёхкоординатных РЛС).
Потенциальная ошибка может быть значительной, особенно в РЛС метрового диапазона. Так, например, при β0,5 Р = 4 0 и γ1 = 13дБ на границе зоны обнаружения (r = R) потенциальная ошибка измерения азимута составляет σβпот = 0,4°.
Для снижения потенциальной ошибки необходимо:
уменьшать ширину ДН антенны путем увеличения соответствующего размера антенны или уменьшения длины волны;
увеличивать энергию, излучаемую в зону обзора, с целью увеличения R.
12.3.2. Ошибки измерения угловых координат за счёт особенностей распространения радиоволн
Ошибки за счёт рефракции. На точность измерения азимута рефракция радиоволн практически не влияет, ввиду малости градиента показателя преломления в азимутальной плоскости.
При измерении угла места, ошибки, обусловленные рефракцией, могут быть значительными. Это связано, во-первых, с тем, что состояние атмосферы меняется существенно с изменением высоты, а, во-вторых, с тем, что в угломестной плоскости отсутствуют ориентиры, отражение от которых можно было бы использовать для коррекции измерений угла места.
Показатель преломления n в тропосфере зависит от температуры, давления и содержания водяных паров и определяется соотношением
![]()
где Т — температура воздуха, К;
р — барометрическое давление, Па;
l — парциальное давление водяного пара, Па.
Параметр Nр называют индексом рефракции. В диапазоне 100... 10000 МГц индекс рефракции не зависит от частоты. Поскольку с увеличением высоты р и l уменьшаются, то уменьшается и показатель рефракции. При нормальных атмосферных условиях показатель преломления с увеличением высоты уменьшается со скоростью 4 • 10 м-1. Его типовое значение у поверхности земли составляет n = 1,0003 (индекс рефракции Np = 300).
На рис. 12.2 представлена зависимость ошибки измерения угла места в тропосфере от высоты для различных углов места и влажности. Видно, что ошибка существенно зависит от указанных факторов и увеличивается с уменьшением углов места и увеличением влажности.
Классическим
методом учета атмосферной рефракции
в угломестной плоскости является замена
действительного радиуса Земли (Rз
= 6371 км) эквивалентным радиусом при
вычислениях высоты: Rз
экв = кRз,
к = [1 + Rз
(dn/dH)]-1,
где dn/dH —
скорость изменения показателя преломления
с высотой (в общем случае зависит от
высоты).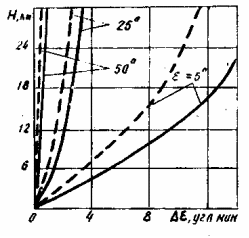
Для нормальной атмосферы (стандартная рефракция) dn/dH = - 4 • 10-8 м-1, к = 4/3 и R3 = 8500 км. При точных измерениях требуется учёт реальной рефракции. Поправка па рефракцию при малых ε составляет Δεрефр = r(dn/dH)/2.
Рис. 12.2. Ошибка измерения угла места в тропосфере при влажности 100% (сплошные линии) и 0% (пунктирные линии) в зависимости от высоты и угла места цели.
Для введения поправки на рефракцию с учетом конкретных атмосферных условий на РЛС необходимо иметь специальные приборы, измеряющие температуру, влажность и давление окружающей среды, а также таблицы для определения dn/dH.
При учёте рефракции ошибка измерения угла места σεРВВ не превышает 2 ...3'.
Ошибки, обусловленные влиянием земли. Переотражения радиоволн от подстилающей поверхности и местных предметов сказываются, прежде всего, на точность намерения угловых координат МВЦ. Ошибка измерения азимута, обусловленная влиянием земли, для среднепересечённой местности составляет примерно 1 ...2', а для горной — 15...20'. Ошибки измерения угла места особенно велики на малых углах места, когда значительная часть антенного луча облучает земную поверхность. Они могут иметь значение от единиц минут до единиц градусов [8,12]. Для их снижения необходимо уменьшать ширину ДН антенны в угломестной плоскости, уровень первых боковых лепестков и правильно выбирать позицию РЛС.
Ошибки, обусловленные аномалиями в атмосфере. Ошибку измерения угловой координаты, обусловленную наличием нерегулярных неоднородностей (аномалий) в атмосфере, можно оцепить по формуле
![]()
где σп — среднее квадратическое значение коэффициента преломления радиоволн в неоднородности;
L0 — размер неоднородности;
L — протяженность трассы с неоднородной атмосферой.
Эта ошибка может составлять от 0,5' (для коротких неоднородных трасс) до 10...15' при распространении радиоволн вдоль границы суши и водной поверхности.