

13.5. Реальная разрешающая способность рлс по высоте
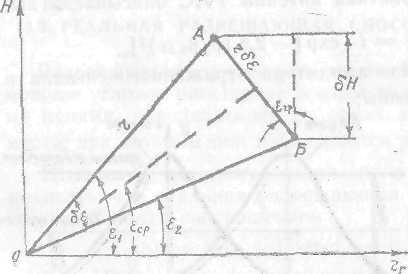
Рис.
13.3-
К устаноВЛеггаю связи между разрешающими
способностями РЛС па высоте к
углу
меаа
б// = ГН COS 8(.|j,
пде £<■„ = («] -j- ег)/2. по углу места по аналогии с (13.2)
Разрешающая способноет! определяется соотношением
![]() (13.8)
(13.8)
При ширине сектора зоны обзора по углу места, равной 30... ... 45е, п качестве ЭЛТ индикатора высоты QTp = 400... 500 второе слагаемое мало п составляет
![]()
272
Поэтому при оцеН'Ке разрешающей способности РЛС .но высоте с достаточной для 'практики точностью можно пользоваться приближенной формулой
. - ■— •§#■■= гео-йре-озвер.- -_ (13^9-).,
■ Из""(|3.8), (13.9) следует, что с увеличенном дальности и умепь-1. шепнем угла места разрешающая способность по высоте ухудшается и при реализуемых в настоящее время-1ведичин.ах.'Е0.5.р л дальностях обнаружения может составлять несколько километров. Основным путем ее улучшения является у.менмнеише'щйрйны ЛН_.ан-тепны 'В угломестной .плоскости. ■
13.6. Вероятность разрешения целей в группе
Вероятность разрешения целей в группе ^представляет собой вероятность того, что имеет место разрешение целей хотя бы по одному из параметров (г, [1, е), и является обобщенным показателем, характеризующим, возможности РЛС но разрешению.
Этот показатель может использоваться для оценки эффективности РЛС и радиолокационной сиетемы по вскрытикг-боевы.ч порядков авиации противника. Поэтому задача определения вероятности разрешения целей в группе является чрезвычайно важной.

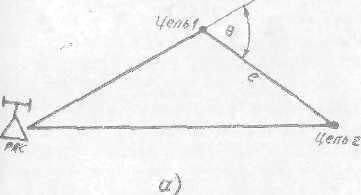
Рис. 13.4. К иллюстрации разрешения целей в группе: а — взаимное положение целей; б —область возможных положений второй ЦЕЛИ '
Рассмотрим методику се решения для простейшего случая — разрешения двух целей (рис. 13.4а). Пусть расстояние между целями, определяемое соображениями безопасности полета или обеспечения минимума потерь от огневего воздействия средств ПВО (см. §1.5), лежит в пределах / G [lmm, /mas], а взаимное угловое расположение — в пределах 0 t [G,2it].
Тогда область возможных положений второй цели представляется и виде кольца {рие. 13.46), площадь которого
![]()
(13.10) 273
Определим вероятность разрешении целей при равновероятных законах распределения значении I и в, т. е, при р (I) = 1/(/тах —
— ^гащ) И р (в) =s= 1/2л, ДЛЯ Двух CJIV'iaCB.
Случай 1 (рис. 13.5а): 1тп < 6Й < W; /г1!|„ < 6/,i < /,„^.
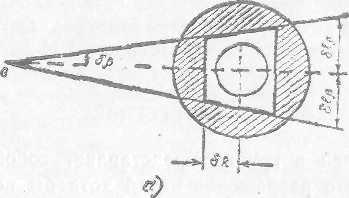
Из рисунка Видно, что раз решение будет иметь место. если вторая цель попадет в заштрихованную область. Be
роятность этого события
(13.11)
![]()
где i,! - площадь заштрихованной области.

Рис. 13.5. К определению вероятности разрешения целей в группе: а — случай I; б — случай 2
![]()
Нетрудно видеть, что при ?>■ SR
Подставив (13.10), (13.12) в (13.il), получи-м
![]()
(13 13)
Случай 2 (рис. 13.56): /гвт < 6R < /raas. &k Вероятность разрешения целей в этом случае
![]()
где Sfi«r — площадь сегмента:
![]()
![]()
Отсюда
где ф = 2 arc cos (&R/lm^), 274
(Ф/2).
Сооънощенил (13.13), (13.14) позволяют определять вероят-Врсть разрешения -двух целей ;В группе при известных боевых порядках авиации 'противниками заданных разрешающих способностях РЛС .по дальности и азимуту.
При наличии п целей в группе вероятность их разрешения равна произведению вероятностей разрешения всевозможных пар целей:
![]() (13.15)
(13.15)
Число сомножителей в (13.15) равно числу сочетаний из л по [два.
13.7. ПОТЕНЦИАЛЬНАЯ РАЗРЕШАЮЩАЯ СПОСОБНОСТЬ
Задача оптимального разрешения двух сигналов может быть сформулирована следующим образом.
Пусть па вход приемника поступает сигнал с комплексной амплитудой Y (t), представляющий собой смесь налагающихся друг на друга сигналов Х\ (t) и Х% (0 и помехи N (t):
![]()
где Аи А2 -случайные дискретные величины, принимающие значения 1 и 0 в зависимости от наличия или отсутствия соответствующего сигнала.
Процесс разрешения з этом случае состоит в принятии решения о наличии одного из сигналов, (или о значении его параметра) в присутствии другого случайного сигнала. Если показатели качества обнаружения (измерения параметров) второго сигнала при наличии первого остаются выше допустимых, то говорят, что второй сигнал разрешается в смысле обнаружения (измерения параметров). Если при этом и первый сигнал разрешается в присутствии второго, считается, что сигналы взаимно разрешаются. Задача оптимального разрешения двух сигналов сводится к
нахождению такого алгоритма обработки сигнала )'(/). при ко тором обеспечивается максимизация качества разрешения сигна лов ,Yi (0 и Х2 (t). ■ - ,
Порядок решения этой задачи сводится к следующему.
!) Составляется отношение правдоподобия при условии, что
обнаруживается, например, сигнал Х\ (О, а мешающими являются сигнал Х% (0 и помеха
где
Рс;!,г2.п[У![]() (01.
Р<-.2,п[У
(*)]— плотности
вероятности реа-
(01.
Р<-.2,п[У
(*)]— плотности
вероятности реа-
лизапии У (/) при наличии и отсутствии сигнала Х\ (t) соответственно.
27S
-
Из отношения правдоподобия находится алгоритм оптималь ной обработки У (/), максимизирующий качество обнаружения сигнала Х\ (t).
-
Оценивйетея качество обнаружения сигнала X, (i) при на личии сигнала Х2 (t), которое может служить мерой качества раз решения.
-
Процедура по пунктам 1 ... 3 повторяется для сигналя Хц (/).
Качество обнаружения сигнала Х\ (/) в присутствии мешающего сигнала Х2 (/) ухудшается, поскольку оно определяется не эсей энергией сигнала Э\, а лишь ее частью Эъквх = &w>3i, где k,a ^ ^ I —коэффициент использования энергии сигнала. Oi! определяется соотношением
![]() (13.16)
где Э2
— энергия мешающего
сигнала Х2
(t);
(13.16)
где Э2
— энергия мешающего
сигнала Х2
(t);
р — модуль коэффициента корреляции сигналов Х\ (/) и X2{t). ■
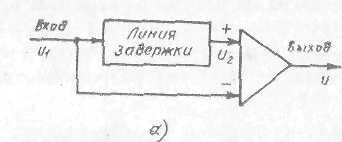
Рис. 13.fi. Высокочастотное дифференцирование с помощью ЛЗ: a - -структурная схема; б — эпюры напряжений
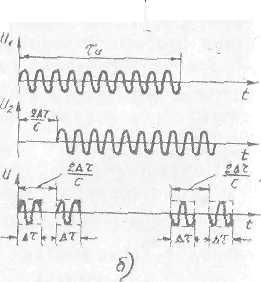
Следует отметить, что практическая реализация алгоритмов оптимального разрешения затрудняется в связи с тем, что временное положение сигналов заранее неизвестно,-Это приводит к необ-
276
ходимости многоканального построения устройства оптимального разрешения, что делао его чрезвычно громоздким. На практике [используют квазиоптимальные устройства разрешения. В случае ; разрешения сигналов по дальности такие устройства выполняются ■ш основе схем высокочастотного дифференцирования (рис. 13.6а, 13.7а). Время задержки в линии (рис. 13.6а) выбирается из условия Дт = пТ0 < ти и определяет разрешающую способность по дальности (здесь То— период высокочастотных колебаний).
Эпюры напряжений, поясняющие принцип работы устройства, приведены на рис. 13.66. Недостатком схемы дифференцирования I4 является удвоение числа отметок на выходе. При малом числи I целей, используя схему совпадения, этот недостаток можно устра-|ннть. Повышение разрешающей способности сопровождается энергетическими потерями, увеличивающимися по мере роста выпг-■рыща в разрешении %а/А%. Поэтому такая обработка целесообразна лишь при относительно небольших дальностях, когда имеется запас в энергии сигнала.
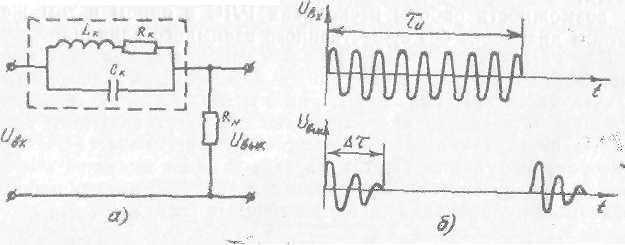
Ряс. 13 7. высокочастотное дифференцирование 0 помощью контура. а— гхема дифференцирующего контура; 6 -эпюры напряжении
Высокочастотное дифференцирование можно осуществлять также с помощью дифференцирующего контура (рис. 13.7а). Параллельный контур с эквивалентным сопротивлением в установившемся режиме R кв ^ Ru препятствует прохождению колебаний на выход схемы. Сигнал па выход проходит лишь во время переходных процессов-в контуре в начале и конце импульса (рис. 13.76). Эта схема имеет те же недостатки, что и схема на линии задержки.
В заключение отметим, что в случае, когда разрешение сигналов осуществляется без ухудшения качества обнаружения (без потерь в отношения сигнал—шум), в качестве меры разрешающей способности используют значения:
по дальности 6R = £Ти<м/2, где Тци) — длительность импульса на выходе приемника;
по угловым координатам бв = в^др, где ве,5л — ширина ДН антенны РЛС в соответствующей плоскости,
277