

12.4.1. Уравнение высоты
Наземные РЛС высоту полета цели непосредственно не измеряют. Высота определяется расчетным путем с использованием значений дальности и угла места цели. Для РЛС, расположенной па земной поверхности в точке О (рис. 12.7), согласно теореме косинусов
![]()
.ткуда
![]()
При И <'с 2/?закн это выражение преобразуется к виду:
(12.23)
![]()
Уравнение высоты (12.23) решается ли бо с помощью аналоговых вычислителей, специализированных ЭВМ
261
Аналоговые вычислители (йнщчжзторы высоты) применяются в специализированных РЛС — радиолокационных высотомерах. Принципы построения последних в основном такие же, как и радиолокационных дальномеров. Отличие состоит лишь r том, что в высотомерах приняты меры по обеспечению большей точности измерения угла места цели (увеличен вертикальный размер антенны с целью получении приемлемых значеаии eo,sp, осуществляется сканирование антенного луча в угломестаюй плоскости и т. д.) и имеется индикатор высоты (ИВ).
Специализированные ЭВМ используются в тре .^.координатных РЛС с парциальной диаграммой направленности лиГо с электронным управлением антенным лучом а угломестпой плоскости. ' При сравнительно невысоких требованиях к точности определения Я в уравнении (12.23) значение #з&кв принимается постоянным и равным 850(1 км (случай стандартной рефракции). При высоких требованиях к точности (.например, при определении высоты полета МВЦ) в уравнение подставляются значения dn/dH, соответствующие конкретному состоянию атмосферы (см. § 12.3.2). В общем случае гири расчете И следует учитывать и высоту подъема антенны На.
12,4.2. Связь ошибки измерения Высоты с ошибками измерения дальности и угла места
Как видно из (12.23). ошибки измерения высоты зависят ел ошибок измерения дальности и угла места цели. Для установления этой связи воспользуемся соотношениями (12.23), (12.5). В результате найдем
(12.24)
![]()
Оцепил? степень влияния каждой из ошибок оь и ап на опгюку измерения высоты <тн-
При он = 0 или при милых углах места, когда вторым слагэ-емым подкоренного-выражения можно [1рено5реггь: ид = г cos e ая или fT/i да rae.
Если г ~ 300 км и о>, ■=--■ 5', то ип -~ 450 и. Это свидетельствует о значительном влиянии ошийки измерения угла места па ошибку измерения высоты и о необходимости принятия .мер но снижению ое как яри проектировании РЛС, так и в процессе ее эксплуатации (тщательное горизоитировашш и юстировка антенны п дат чнка угла места, еыбор позиции для высотомеров н г. д.).
При ое = 0 ошибка оц = (sin г + г/Нзыв) ел =» егд sin e.
Ксли
ё
= 30е'
и ип =
500 и, то <тц
= 250 м, т. с. влияние ошибок
измерения дальности также весьма
сущегтвенчго.
Б случае, когда высота считываете* непосредственно с экрана индикатора высоты, при определении он в выражение (12.24) пе-262
обходимо надставлять значения ае и оп без учету ошибок съема этих координат. Если же высота определяется графическим способом (по номограмме) или вычисляется в ЭВМ по измеренным Значениям к и г, то такой учет обязателен. Поскольку ошибки визуального съема велики, точность графического определения высоты крайне низка, и в современных РЛС этот способ но исполь-
Вустси. Для уменьшения ошибок определении высоты в трехкоор-динатных РЛС съем координат цели г и е п их ввод в ЭВМ должны осуществляться автоматически или, по крайней мере, нолуаз- . томатнчески.
12.4.3. Инструментальные ошибки определения высоты
В радиолокационных высотомерах с индикаторами высоты результирующая ошибка uHptx определения высоты цели
![]()
где а,;—ошибка, обусловленная неточностью измерения i и а (см. (12.24);
он 1,иг — инструментальная ошибка (np-;i расчете // с помощью ЭВМ эта ошибка практически равна пулю). Инструментальная ошибка обусловлена неточностью настройки индикатора высоты и неточным съемом высоты.
Для уяснения характера этой ошибки рассмотрим ряд вопросов, связанных с принципами построения и особенностями работы индикаторов высоты. Обычно ИВ выполняются на базе ЭЛТ.
Горизонтальная развертка на экране ЭЛТ является разверткой дальности: х = к,г = at, i £ [О, Тр], а вертикальная — разверткой высоты:
(12.25)
где
(12.211) (12.27)
— длительность развертки;
—■коэффициенты пропорциональности. Отметки от цели на экране IIВ (рис. 12.8а) имеют вед вертикальных штрихов, размер которых определяется шир-и-ной ДП в угло-местной плоскости ёо.вр. Для получения развертки высоты в ссот-бетствли с (12.25) необходимо проинтегрировать напряжение вида и (I) = a-sm ё + 2Ы v,,интервале [О, Г,.,]. Действительно:
![]()
Таким Образам, в капал развертки высоты (рис. 12.86) должен входить интегратор, на который подаются следующие напряжения:
U\ = a sin e — пропорциональное углу места;
u> = 2bt -- линейно-нарастающее напряжение; при г б [О, 7Р]
— 'сгробиругощий импульс длительностью Тр, определяющий время интегрирования.
О при t £ [О,
Напряжение
Ы\
формируется
потен-Изометрическим
датчиком синуса угла
места, движок которого связан с валом
качания антенны РЛС (см. рис.
12.86). Лпнейпо-нарастагощее (пилообразное)
напряжение н2
формируется под воздействием импульса
запуска
РЛС генератором пилообразного
напряжения (ГПИ). Последний используется
н для формирования развертки
дальности индикатора. Устройство
срыва предназначено для прекращения
работы интегратора после достижения
на его выходе уровня на-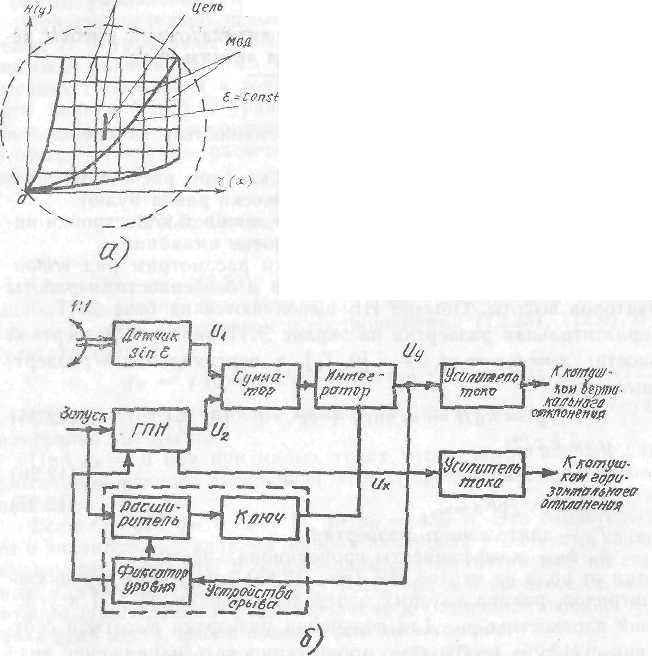
Рис. 12.8. Индикатор высоты' а — вид экрана; б - устройство формирования разнерток высоты и дальности
пряжения, соответствующего максимальной высоте. Напряжения 564
с интегратора и ГПН подаются на усилители тока, подключенные к катушкам соответственно вертикального и горизонтального отклонения.
Для электрической калибровки развертки высоты используются масштабные отметки высоты (ЛЮБ). Существуют два основ-иых способа их формирования-.
сравнение напряжения высоты с фиксированными уровнями;

Рис. 12.10. И импульсно-формирующая
элт
формирование MOB с помощью масштабных отметок дальности.
Функционирование устройства формирования MOB (рис. 129а), реализующего первый способ, поясняется эпюрами (рис. 12.96). В течение времени развертки высоты при каждом значении е = const формируется серия коротких импульсов и моменты дости-.жения напряжением иу фиксированных уровней «1, и2.... [Эти импульсы подаются на управляющий электрод ЭЛТ ИВ и на экране высвечиваются соответствующие им точки. При I слитном растре (при качании антенны) на экране образуются горизонтальные линии равных высот. В качестве устройства сравнения чаще всего I используется матричная им-пульспо-формирующая трубка
(рис. 12.10). Она представляет управлением лучом, у которой

Рис. 12.9. Устройство формирования масштабных отметок высоты способом сравнения напряжения высоты е фиксированными уровнями; а — структурная схема: б — эпюры напряжений
собой ЭЛТ с электростатическим вместо экрана имеется матрица в
265
виде гонких металлических нитей, расположенных равночерно перед коллектором. Отклонение луча производится поперек нитей матрицы путем подачи иа отклоняющие пластины напряжения высоты. При пересечении лучом нитей матрицы ток коллектора j мепылается или прекращается (при da С da, где dB— диаметр нити), и на выходном резисторе /?,, выделяется положительный импульс напряжения. Достоинством такого способа является возможность отображения MOB в рабочем режиме ИВ, т. о. когда па пего подаются эхо-сигйалы, недостатком — зависимость точности формирования MOB 01 ошибок формирования напряжения высоты. Кроме того, надежность пмпульсно-формпрующен ЭЛТ невелика.
Второй способ основан на следующем принципе. Если отключить ГЛН от интегратора, что соответствует исключению параболической составляющей в (12.23), а па вход интегратора подать напряжение, соответствующее sin5D45,5' = 0,1, то зависимость между высотой и дальностью будет иметь вид // = г sin е- = 0,1г.
При подаче па ЭЛТ Ю-кялометровых МОД они будут соответствовать однокилуметровым отрепкам высоты. Для формирования лшшй равных высот необходимо передвигать полученное изображение по экрану ЭЛТ с помощью медленной горизонтальной раз-вертжи. Развертка высоты в этом случае представляет собой практически вертикальную линию, так кггк 7р -С Тгор (Тгм, — время горизонтальной развертки, равное долям секунд). Поп работе ИВ в режиме наиесения отметок высоты эхо-сигналы подавать нельзя. Этот режим включается периодически, после чего включается основной режим работы ИВ, Благодаря послесвечению на экране создается совмещенное изображение. Достоинство такого способа состоит в высокой точности формирования MOB 11 большой надежности, что и определяет его преимущественное использование. К недостаткам его следует отнести возможность потери информации при работе высотомера в режиме поиска. Однако ввиду того, что у высотомеров основным является режим работы по целеуказанию, этот недостаток не столь существенен.
Рассмотрим более подробно перечисленные п начале параграфа составляющие ошибок определения высоты в радиолокационных высотомерах.
Ошибка определения высоты за счет неточности настройки ИВ возникает вследствие несоответствия Коэффициентов а и Ь значе ни им, определяемым соотношениями (12.26), (12.27). Неточность установки коэффициентов приводит к ошибке в намерении высоты:
![]()
Среднее квадратичеокое значение этой ошибки можно определить, используя соотношения (12.9), (12.23)
![]()
где иа и Гц, — средние квадр этические ошибки установки коэффициентов.
Умножив первое слагаемое подкоренного выражения n;i а\/й%, а второе па ЬуЬ£, нелучмм
![]()
Оценим влияние неточности установки коэффициентов на точность измерения высоты в пред положен;™, что максимальная относительная ошибка установки составляет 1 %. Тогда при равновероятном законе распределения ошибки
![]()
Составляющая ошибки оц, обусловленная неточностью установки коэффициента а
![]()
при г = 100 км, r = 3(У' равна о-ща) = 285 м. Составляющая ошибки пи, обусловленная неточностью установки коэффициента Ь: Ьиф) == (f2/2/?3 »кв)/(оь/&о) при тех же условиях равна ащь) ~ 3 м.
Чтобы свести к минимуму ошибки аща) и онф), индикатор 'настраивают с использованием электрических масштабных отметок и эталонных напряжений, В этом случае ошибки определяются точностью совмещения соответствующих масштабных отметок и их значения примерно в пять—шесть раз меньше значений, указанных в приведенном примере.
При съеме высоты возникают следующие ошибки.
Ошибка за счет неточного определения центра отметки оиио =
= ДНоти/30 ~ feo.sp/31), где ДЯ0-™ — размер отметки, пересчитанный в высоту.
При записи этого соотношения учтено, что линейный размер отметки высоты 1ц отм, как правило, значительно превышает разрешающую способность человеческого глаза. Если, например, ? =~ = 200 км и бодр = 0,5а, то (Тдцо = 0,06 км, г. с. незначительная.
Ошибка ояцо имеет место как при визуальном, так и при полуавтоматическом съеме.
Ошибка интерполяции аи В11Т = (0,05 ...0,1) \НШК. При \ИШК -= ~— I км, Он инт = 50... 100 м. При полуавтоматическом съеме эта ошибка отсутствует.
Ошибка за счет неточности формирования ИОВ имеет место (Только лишь при визуальном съеме. В случае формирования MOB из масштабных отметок дальности эту ошибку можно практически не учитывать 'ИЗ-за се малости.
Ошибка за счет неточного совмещения маркера (при полуавтоматическом съеме) era чарк = »г,7^л:.Ч1к/3, где пги = Mi/Lv и - -масштаб ИВ'по Bi>icore; Л//—диапазон высот на развертке с длиной f.pir
267
Глава .13. ОБЕСПЕЧЕНИЕ ТРЕБОВАНИЙ