

6.2.3. Усилители с логарифмической амплитудной характеристикой
В усилителях с логарифмической амплитудной характеристикой (ЛАХ) дифференциальный коэффициент усиления обратно пропорционален амплитуде входного сигнала. Эти усилители обладают весьма широким динамическим диапазоном.
Коэффициент передачи усилителя с ЛАХ для любого основания логарифма выражается формулой
![]()
(6.4)
и убывает обратно пропорционально амплитуде входного сигнала. В соотношении (6.4):
Ко — коэффициент усиления в линейном режиме;
Uвхо — входное напряжение, соответствующее переходу от линейного участка амплитудной характеристики к логарифмическому.
Динамический диапазон усилителя с ЛАХ зависит от числа каскадов n и их коэффициентов усиления К1 при работе на линейном участке амплитудной характеристики
![]()
Приёмник с ЛАХ обеспечивает практически без инерционную нормировку входных сигналов, не теряет чувствительности после прихода сильных сигналов и имеет собственные шумы, незначительно превышающие шумы обычного преемника. Если характер АШП аналогичен характеру шума приёмника, то интенсивность


Рис. 6.5. Логарифмический усилитель: а — с последовательным детектированием; б— операционный
помех на выходе приёмника практически не зависит от их интенсивности на входе. Среднее квадратическое значение напряжения помехи, амплитуда которой распределена по закону Рэлея, на входе логарифмического приёмника
Постоянная составляющая напряжения помехи на выходе приёмника с ЛАХ растет с увеличением интенсивности помехи на входе приёмника.
Недостатками усилителей с ЛАХ являются:
зависимость времени задержки сигнала от его амплитуды на входе усилителя;
зависимость полосы пропускания от уровня входных сигналов;
расширение спектра флюктуации сигналов пассивных помех.
В приёмных устройствах находят применение различные разновидности усилителей с ЛАХ (рис. 6.5).
В состав логарифмического УПЧ с последовательным детектированием (см. рис. 6.5а) входят п однотипных последовательно включенных усилителей-ограничителей. Выход каждого каскада подключён через амплитудный детектор к сумматору.
Этот тип усилителя прост по устройству, однако применим лишь тогда, когда в процессе сжатия динамического диапазона входных радиосигналов допустим переход к видеосигналам, т. е. при некогерентной обработке сигналов. Выходное напряжение операционного логарифмического усилителя (рис. 6.5б) в пределах участка, где характеристики диодов являются логарифмическими. Одиночный каскад этого типа может иметь логарифмическую характеристику в пределах нескольких десятков децибел по входному сигналу. Взаимное замещение диодов и резистора даёт антилогарифмическую характеристику.
6.2.4. Автоматическая регулировка порога ограничения
Для согласования динамических диапазонов элементов видео тракта можно использовать схему (рис.6.6а).Эта схема выполняет функции:
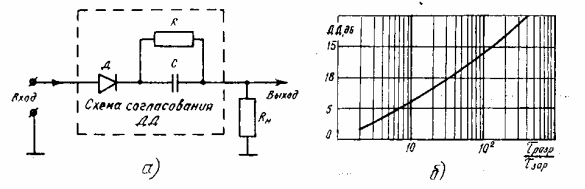
Рис. 6.6 Устройство автоматической регулировки порога ограничения снизу:
а — принципиальная схема; б—к выбору параметров схемы
дифференцирования импульсов большой длительности;
автоматической регулировки порога ограничения снизу к зависимости от интенсивности помехи;
временной регулировки порога ограничения снизу в начале дистанции.
При подаче на вход схемы видеонапряжения положительной полярности конденсатор С заряжается через прямое сопротивление диода и сопротивление резистора Rн с постоянной времени τ зар , примерно равной длительности полезного сигнала. Разряд конденсатора происходит через обратное сопротивление диода и резистор R, шунтирующий конденсатор, с постоянной разряда Благодаря этому на конденсаторе устанавливается определенный уровень положительного напряжения, который и является порогом ограничения снизу. На выход схемы проходят шумовые выбросы, сигналы и другие импульсы, превышающие порог ограничения. Импульсы, амплитуда которых меньше порога ограничения, на выход схемы не проходят.
При воздействии на схему мощного зондирующего импульса напряжение на конденсаторе возрастает до величины, определяемой, динамическим диапазоном УПЧ. После окончания воздействия напряжение на конденсаторе уменьшается до установившегося значения, определяемого помеховой обстановкой на входе приёмника РЛС. Скорость разряда конденсатора зависит от постоянной времени разряда конденсатора. Изменение порога ограничения во времени в начале дистанции эквивалентно, в определенном смысле, действию временной регулировки усиления.
На рис. 6.6б изображен график, иллюстрирующий зависимость степени расширения динамического диапазона элементов тракта, включенных после схемы АРП, от параметров схемы. Включение схемы АРП в приемный тракт приводит к некоторому снижению качества обнаружения сигналов, особенно слабых. Поэтому параметры схемы АРП следует выбирать с учетом допустимых потерь в качестве обнаружения. При отсутствии внешних помех схему АРП целесообразно выключать.