

5.7.3. Принципы построения элементов и устройств системы сдц
Устройство согласования динамических диапазонов. В качестве устройства согласования ДД могут использоваться ограничители сигналов сверху, усилители с АРУ или с программной регулировкой усиления (ПРУ).
Ограничители применяются при невысоких требованиях к значению коэффициента подавления ПП. Это связано с тем, что ограничитель является нелинейным элементом и при прохождении через него сигналов ПП ширина спектра их флюктуаций увеличивается.
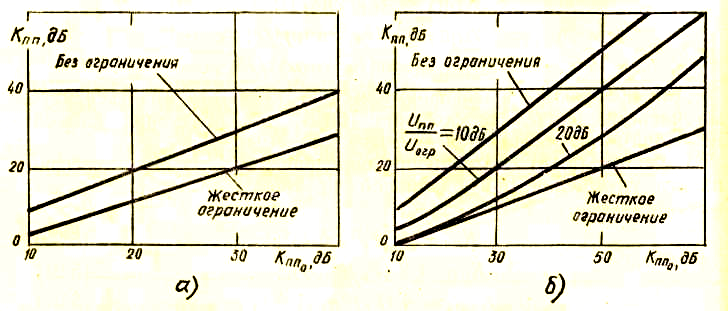
Рис. 5.11. Влияние ограничителя на коэффициент подавления ПП: а — при однократном вычитании; б — при двукратном вычитании
Влияние
ограничителя на эффективность работы
систем СДЦ с
однократным и двукратным вычитанием
иллюстрируется рис. 5.11, где
представлены зависимости
![]() при
различных относительных уровнях
ограничения от коэффициента подавления
ПП в отсутствие
ограничения
при
различных относительных уровнях
ограничения от коэффициента подавления
ПП в отсутствие
ограничения
![]() .
Из графиков видно, что включение
ограничителя
приводит к весьма существенному снижению
.
Из графиков видно, что включение
ограничителя
приводит к весьма существенному снижению
![]() ,
особенно
в системах СДЦ с большой кратностью
вычитания.
,
особенно
в системах СДЦ с большой кратностью
вычитания.
Уровень
ограничения
![]() обычно
выбирается таким, чтобы некомпенсированные
остатки ПП по интенсивности напоминали
шум приемника. Если
этого не сделать, то в некоторых случаях
обнаружение
цели даже при достаточно мощном отраженном
сигнале
окажется невозможным из-за засвета
экрана индикатора остатками
ПП.
обычно
выбирается таким, чтобы некомпенсированные
остатки ПП по интенсивности напоминали
шум приемника. Если
этого не сделать, то в некоторых случаях
обнаружение
цели даже при достаточно мощном отраженном
сигнале
окажется невозможным из-за засвета
экрана индикатора остатками
ПП.
Технически ограничитель может быть выполнен на электронных лампах, транзисторах, диодах и других элементах путем соответствующего выбора электрического режима их работы или способа схемного включения.
В случае
протяженных источников ПП более высокий
![]() обеспечивается при применении усилителей
с АРУ. В установившемся режиме такой
усилитель является практически линейным
элементом, поэтому сигналы ПП проходят
через него без расширения спектра
флюктуаций. Однако в случае дискретных
ПП, длительность которых соизмерима
с длительностью сигналов от целой,
эффективность подобных устройств
согласования крайне низка из-за
ограниченного быстродействия.
обеспечивается при применении усилителей
с АРУ. В установившемся режиме такой
усилитель является практически линейным
элементом, поэтому сигналы ПП проходят
через него без расширения спектра
флюктуаций. Однако в случае дискретных
ПП, длительность которых соизмерима
с длительностью сигналов от целой,
эффективность подобных устройств
согласования крайне низка из-за
ограниченного быстродействия.
Широкие возможности по обеспечению линейного режима системы СДЦ при работе в условиях любых видов ПП имеют устройства согласования с ПРУ. Наиболее полно возможности этих устройств реализуются при цифровой обработке. В аналоговых системах СДЦ обычно используется простейшая разновидность ПРУ — временная автоматическая регулировка усиления (ВАРУ), исключающая перегрузку элементов системы СДЦ мощными отражениями от местных предметов.
Фазовый детектор. Основными требованиями к фазовым детекторам в системах СДЦ являются:
перенос спектра входных сигналов в область видеочастот без его расширения;
достаточно большой динамический диапазон.

Рис. 5.12. Принципиальная схема фазового детектора: а - небалансного; б —балансного
Фазовые детекторы могут быть небалансными и балансными.
Небалансный фазовый детектор (рис. 5.12а) позволяет переносить спектр входного сигнала в область видеочастот без его существенного расширения только лишь при условии, что амплитуда опорного напряжения значительно превышает амплитуду входных сигналов. Это обстоятельство ограничивает в ряде случаев целесообразность использования подобной схемы в системах СДЦ.
Балансный фазовый детектор (рис. 5.12б) в наибольшей степени отвечает требованиям, которые предъявляются к фазовым детекторам в системах СДЦ на видеочастоте. Его динамический
диапазон
значительно больше динамического
диапазона небалансного
ФД из-за отсутствия необходимости
выполнения условия
![]() (Здесь
(Здесь
![]() —амплитуда
опорного напряжения).
—амплитуда
опорного напряжения).
Устройство формирования опорного напряжения. Устройство формирования опорного напряжения (УФОН) должно обеспечивать:
исключение
случайной начальной фазы зондирующих
импульсов
при переносе спектров отраженных
сигналов в область видеочастот
(для выполнения этого требования
начальная фаза опорного
напряжения
![]() должна
быть равна случайной начальной фазе
зондирующего импульса
должна
быть равна случайной начальной фазе
зондирующего импульса
![]() );
);

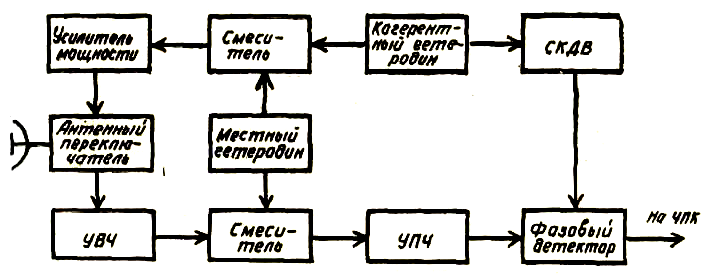
Рис. 5.13. Формирование опорного напряжения в РЛС с мощным автогенератором: а — структурная схема РЛС; б — схема компенсации действия ветра
![]()
Рассмотрим варианты построения УФОН. Структурная схема устройства формирования опорного напряжения для РЛС с автогенератором представлена на рис. 5.13а. Первое требование к УФОН в РЛС с автогенератором выполняется путем навязывания когерентному гетеродину (КГ) случайной начальной фазы зондирующего сигнала в момент излучения последнего. Процесс навязывания фазы называют фазированием КГ. Когерентный гетеродин работает на промежуточной частоте. Поэтому сигнал фазирования получают, смешивая ослабленный выходной сигнал передатчика с сигналом местного гетеродина в смесителе канала фазирования. Время навязывания когерентному гетеродину новой фазы колебаний (время фазирования) определяется добротностью его колебательной системы, амплитудой фазирующего импульса и величиной расстройки частоты гетеродина относительно частоты фазирующего импульса. Оно тем меньше, чем ниже добротность колебательной системы гетеродина, больше амплитуда фазирующего импульса и меньше разность частот гетеродина и фазирующего импульса. По окончании фазирования КГ генерирует колебания, фаза которых в каждом цикле зондирования жестко связана с начальной фазой излучаемого в пространство высокочастотного импульса передатчика.
К когерентному гетеродину предъявляются два противоречивых требования. Во-первых, для подавления сигналов, отраженных от источников ПП, требуется высокая стабильность частоты гетеродина. Последнее можно обеспечить только лишь при условии высокой добротности его колебательной системы. Во-вторых, для быстрого и качественного фазирования его колебательная система должна обладать малой добротностью.
Удовлетворить оба эти требования можно двумя спосо-
бами:
срывом колебаний КГ перед подачей на него фазирующего сигнала;
уменьшением добротности колебательной системы КГ на время действия фазирующего сигнала.
Наиболее часто в РЛС используется второй способ, который технически реализуется путем использования в качестве последнего каскада УПЧ канала фазирования специального усилителя— каскада фазирования (см. рис. 5.13а). В отсутствие сигналов фазирования этот каскад закрыт и практически не оказывает шунтирующего действия на колебательную систему КГ.
При поступлении фазирующего сигнала, а в ряде случаев дополнительно и специального стробирующего импульса, каскад фазирования открывается и его выходное сопротивление шунтирует колебательную систему КГ, уменьшая ее добротность. В качестве стробирующего импульса может быть использован задержанный импульс запуска. Стробирование производится с целью исключения фазирования КГ началом и концом фазирующего импульса, так как эти части импульса имеют нестабильную фазовую структуру.
Для
выполнения второго требования между
когерентным гетеродином
и входом фазового детектора включают
так называемую
схему компенсации действия ветра (СКДВ).
Эта схема обеспечивает
смещение частоты КГ на доплеровскую
поправку. Принципиально
это может быть обеспечено с помощью
смесителя путем
выделения на его выходе одной из боковых
частот, образующихся
в результате биения частот когерентного
гетеродина![]() и
низкочастотного генератора —
и
низкочастотного генератора —
![]() .
Однако техническая реализация
подобной СКДВ связана с большими
трудностями в силу того,
что селектируемая частота
.
Однако техническая реализация
подобной СКДВ связана с большими
трудностями в силу того,
что селектируемая частота
![]() незначительно
отличается от частоты
КГ. Поэтому частота обычно смещается
схемами двукратного
преобразования частоты с использованием
высокостабильных
(например, кварцевых) генераторов.
незначительно
отличается от частоты
КГ. Поэтому частота обычно смещается
схемами двукратного
преобразования частоты с использованием
высокостабильных
(например, кварцевых) генераторов.
Схема
устройства двукратного преобразования
частоты представлена на рис. 5.13б. В
смесителе 1
происходит первое преобразование
частоты: на смеситель подаются сигналы
когерентного гетеродина
и кварцевого генератора с частотой
![]() .
Из ряда
частот, образующихся на выходе смесителя,
фильтр 1
выделяет
частоту
.
Из ряда
частот, образующихся на выходе смесителя,
фильтр 1
выделяет
частоту
![]() (другие
комбинационные частоты отфильтровываются
за счет выбора достаточной большой
частоты
(другие
комбинационные частоты отфильтровываются
за счет выбора достаточной большой
частоты
![]() ).
В
смесителе 2
частота
преобразовывается вторично. Из
комбинационных частот на выходе
смесителя фильтр 2
выделяет
частоту
).
В
смесителе 2
частота
преобразовывается вторично. Из
комбинационных частот на выходе
смесителя фильтр 2
выделяет
частоту
![]() .
.
Частота
кварцевого генератора в небольших
пределах может изменяться
путем ручного либо полуавтоматического
изменения емкости,
шунтирующей кварцевый резонатор. Для
обеспечения линейности модуляционной
характеристики кварцевого генератора
(зависимости
![]() от
управляющего напряжения) часто
одновременно изменяются
частоты обоих кварцевых генераторов в
противоположные
стороны.
от
управляющего напряжения) часто
одновременно изменяются
частоты обоих кварцевых генераторов в
противоположные
стороны.
Коммутатор
предназначен для выключения СКДВ при
подавлении
сигналов, отраженных от неподвижных
местных предметов. При
наличии стробирующего импульса,
длительность которого соответствует
временной протяженности зоны местных
предметов, на
управляющем входе коммутатора на
смеситель 2
поступают
частоты
![]() и
и
![]() ,
и из комбинационных частот фильтр 2
,
и из комбинационных частот фильтр 2
выделяет
частоту
![]() т.
е. частотная поправка отсутствует.
т.
е. частотная поправка отсутствует.
Для того чтобы спектральные составляющие сигналов ПП попали в полосы режекции устройства ЧПК, необходимо, чтобы значение частотной поправки удовлетворяло условию
![]()
где
![]() —
частота пульсаций
сигналов ПП
на
выходе фазового
детектора;
—
частота пульсаций
сигналов ПП
на
выходе фазового
детектора;
![]() —
частота повторения
зондирующих импульсов;
—
частота повторения
зондирующих импульсов;
![]() =
0, 1, 2, ...
=
0, 1, 2, ...
Устройство формирования опорного напряжения для РЛС с передатчиком, выполненным по схеме задающий генератор — усилитель мощности (рис. 5.14) в отличие от рассмотренного варианта может не иметь в своем составе канала фазирования КГ, если когерентный гетеродин используется одновременно и в качестве задающего генератора.
Устройство череспериодной компенсации. В аналоговых системах СДЦ устройства ЧПК могут быть реализованы на вычитающих потенциалоскопах и на ультразвуковых линиях задержки.

Эквивалентные структурные схемы устройств ЧПК с однократным и двукратным вычитанием представлены на рис. 5.15. Амплитуд-
но-частотные характеристики этих устройств определяются соответственно соотношениями:
![]()
Рассмотрим более подробно особенности технической реализации устройств ЧПК на вычитающих потенциалоскопах и ультразвуковых линиях задержки.
Устройство ЧПК на вычитающих потенциалоскопах. Вычитающий потенциалоскоп (ВП) представляет собой электронно-лучевую трубку с электростатической фокусировкой и электромагнитным управлением лучом (рис. 5.16).
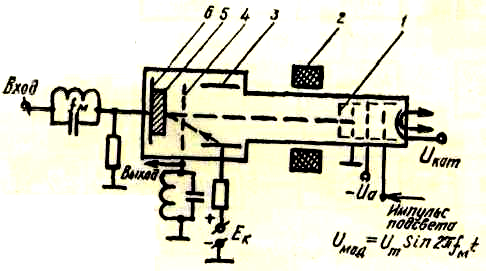
Рис. 5.16. Устройство вычитающего потенциалоскопа: 1 — электронная пушка; 2 — отклоняющая система; 3 — коллектор; 4 — барьерная сетка; 5 — мишень;
6 — сигнальная пластина
Входные
сигналы подаются на сигнальную пластину
и
записываются
на диэлектрической мишени в виде
потенциального рельефа.
Мишень выполнена из материала с высоким
поверхностным
сопротивлением, исключающим растекание
зарядов по мишени, и с коэффициентом
вторичной эмиссии
![]() большим
единицы. Коллектор
находится под положительным потенциалом
относительно
мишени и создает для вторичных электронов,
прошедших барьерную
сетку, ускоряющее поле.
большим
единицы. Коллектор
находится под положительным потенциалом
относительно
мишени и создает для вторичных электронов,
прошедших барьерную
сетку, ускоряющее поле.
Рассмотрим процессы в потенциалоскопе при отсутствии входных сигналов.
Первичный
поток электронов, создаваемый электронной
пушкой, попадая на участок мишени,
выбивает из него вторичные электроны,
число которых всегда больше первичных
![]() .
Поскольку
поле в пространстве мишень — барьерная
сетка в начальный момент отсутствует,
почти все электроны попадут на коллектор,
и вторичный ток будет больше первичного.
Это приведет
к
тому,
что участок мишени будет заряжаться
положительно. По
мере увеличения потенциала мишени
нарастает тормозящее
.
Поскольку
поле в пространстве мишень — барьерная
сетка в начальный момент отсутствует,
почти все электроны попадут на коллектор,
и вторичный ток будет больше первичного.
Это приведет
к
тому,
что участок мишени будет заряжаться
положительно. По
мере увеличения потенциала мишени
нарастает тормозящее
поле для вторичных электронов и число тех из них, которые могут уйти к коллектору, уменьшается.
Процесс будет
продолжаться до тех пор, пока на мишени
не установится равновесный потенциал
![]() при котором количество электронов,
приходящих на мишень, равно количеству
электронов ушедших с мишени к
коллектору.
при котором количество электронов,
приходящих на мишень, равно количеству
электронов ушедших с мишени к
коллектору.
При подаче на
сигнальную пластину входного сигнала
положительной полярности тормозящее
поле в пространстве мишень— барьерная
сетка возрастает и количество вторичных
электронов, которые могут уйти к
коллектору, уменьшается. Потенциал
мишени начинает также уменьшаться,
что приводит к уменьшению тормозящего
поля и увеличению вторичного тока до
тех пор, пока вновь не установится режим
динамического равновесия. Потенциал
мишени
![]() будет при этом равен
будет при этом равен
![]()
где
![]() — амплитуда входного сигнала;
— амплитуда входного сигнала;
![]() — коэффициент,
учитывающий действующую в пространстве
мишень—барьерная сетка часть входного
сигнала.
— коэффициент,
учитывающий действующую в пространстве
мишень—барьерная сетка часть входного
сигнала.
При подаче на
сигнальную пластину отрицательных
входных сигналов вторичный ток вначале
возрастает, а затем начинает убывать
до значения первичного тока. Потенциал
мишени будет при этом повышаться до
значения
![]()
Для записи всех отраженных сигналов в данном периоде повторения производится развертывание электронного луча по мишени. Обычно для этого используется спиральная развертка, создаваемая с помощью отклоняющей системы, запитываемой от специального генератора (как правило, на контурах с ударным возбуждением). Генератор синхронизирован импульсом запуска РЛС и вырабатывает два линейно-нарастающих (или спадающих) по амплитуде колебания, сдвинутых по фазе на 90°. Частота этих колебаний выбирается из условия получения заданной разрешающей способности потенциалоскопа по дальности:
![]()
где
![]() —диаметр
электронного луча в плоскости мишени;
—диаметр
электронного луча в плоскости мишени;
![]() — скорость света;
— скорость света;
![]() — средняя длина
одного витка спирали;
— средняя длина
одного витка спирали;
![]() — разрешающая
способность по дальности с учетом
потенциалоскопа;
— разрешающая
способность по дальности с учетом
потенциалоскопа;
![]() (
(![]() —длительность
импульса, отраженного от цели на
входе потенциалоокопа).
—длительность
импульса, отраженного от цели на
входе потенциалоокопа).
Изменение тока
в нагрузке пропорционально изменению
потенциала мишени
![]() Поэтому выходное напряжение пропорционально
разности входных сигналов в смежных
периодах повторения, т. е,
Поэтому выходное напряжение пропорционально
разности входных сигналов в смежных
периодах повторения, т. е,
![]()
Следует отметить, что при изменении потенциала мишени изменяется не только ток коллектора, но и появляются токи заряда (перезаряда) емкостей участков сигнальная пластина—мишень и мишень—барьерная сетка. Поэтому нагрузку можно включать как в цепь коллектора, так и в цепи сигнальной пластины и барьерной сетки.
При
выборе места включения нагрузки
руководствуются требованием
максимального снижения коэффициента
изменения потерь
![]() ,
который зависит от уровня собственных
шумов потен-циалоскопа.
Источниками шумов потенциалоскопа
являются:
,
который зависит от уровня собственных
шумов потен-циалоскопа.
Источниками шумов потенциалоскопа
являются:
неравномерность диэлектрических свойств мишени;
неравномерная прозрачность барьерной сетки;
тепловые шумы коллектора, обусловленные его разогревом из-за наличия постоянной составляющей тока коллектора;
влияние поля отклоняющей системы;
уход части вторичных электронов в горловину трубки.
Наибольший
уровень собственных шумов потенциалоскоп
имеет
в цепи коллектора, так как на него влияют
перечисленные факторы,
а наименьший — в цепях сигнальной
пластины и барьерной
сетки. Поэтому для снижения
![]() нагрузку
необходимо включать
либо в цепь сигнальной пластины, либо
в цепь барьерной сетки.
Это, в свою очередь, требует разделения
входных и выходных
сигналов, поскольку они действуют в
одних и тех же цепях. Без
такого разделения невозможно получить
эффект череспериодного
вычитания, так как малый выходной сигнал
(результат вычитания),
составляющий единицы милливольт, будет
подавлен, большим
входным сигналом, имеющим значение
десятков вольт.
нагрузку
необходимо включать
либо в цепь сигнальной пластины, либо
в цепь барьерной сетки.
Это, в свою очередь, требует разделения
входных и выходных
сигналов, поскольку они действуют в
одних и тех же цепях. Без
такого разделения невозможно получить
эффект череспериодного
вычитания, так как малый выходной сигнал
(результат вычитания),
составляющий единицы милливольт, будет
подавлен, большим
входным сигналом, имеющим значение
десятков вольт.
Наиболее
приемлемым способом разделения входных
и выходных
сигналов является частотный способ.
Сущность его состоит в
том, что выходной сигнал преобразуется
в радиоимпульс с несущей
частотой
![]() ,
значение которой выбирается из условия
раз-несения спектров входного и выходного
сигналов, обеспечивающего
их надежное разделение. Обычно
,
значение которой выбирается из условия
раз-несения спектров входного и выходного
сигналов, обеспечивающего
их надежное разделение. Обычно
![]() .
Преобразование
осуществляется путем модуляции первичного
луча потенциалоскопа
колебаниями
.
Преобразование
осуществляется путем модуляции первичного
луча потенциалоскопа
колебаниями
![]() ,
причем режим потенциалоскопа
выбирается таким, чтобы он открывался
только положительными полупериодами
колебаний модулирующей частоты
,
причем режим потенциалоскопа
выбирается таким, чтобы он открывался
только положительными полупериодами
колебаний модулирующей частоты
![]() .
При этом как первичный, так и вторичный
токи будут иметь пульсирующий
характер (рис. 5.17). Если в качестве
нагрузки использовать
колебательный контур, настроенный на
частоту
.
При этом как первичный, так и вторичный
токи будут иметь пульсирующий
характер (рис. 5.17). Если в качестве
нагрузки использовать
колебательный контур, настроенный на
частоту
![]() ,
он выделит первую
гармонику последовательности пульсирующих
импульсов
и выходной сигнал будет иметь вид
радиоимпульса. Чтобы
исключить ударное возбуждение этого
контура входным сигналом,
в цепи подачи последнего ставится
фильтр-пробка, представляющий
собой параллельный колебательный
контур, настроенный
на частоту
,
он выделит первую
гармонику последовательности пульсирующих
импульсов
и выходной сигнал будет иметь вид
радиоимпульса. Чтобы
исключить ударное возбуждение этого
контура входным сигналом,
в цепи подачи последнего ставится
фильтр-пробка, представляющий
собой параллельный колебательный
контур, настроенный
на частоту
![]() .
.
Амплитуда
выходного радиоимпульса зависит от
модуля разности
амплитуд
входных сигналов в смежных периодах
повторения,
а фаза 0 или
![]() —
от знака этой разности.
—
от знака этой разности.
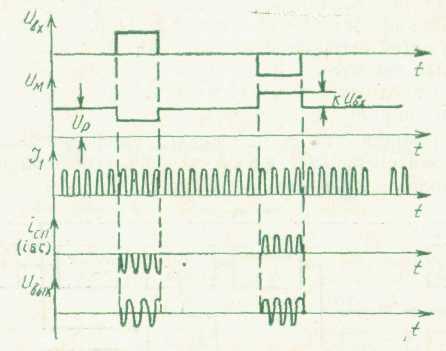
Рис. 5.17. Иллюстрация принципа частотного разделения сигналов в потенциалоскопе
Чтобы исключить подавление сигналов от целей, летящих с оптимальными скоростями, при многократном вычитании необходимо осуществлять синхронное детектирование выходных сигналов потенциалоскопа.
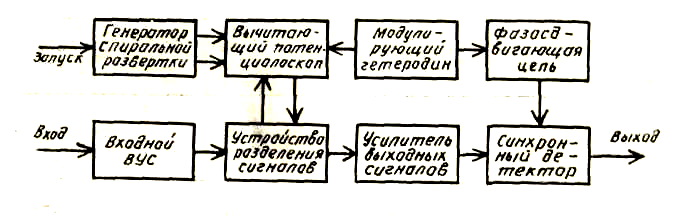
Рис. 5.18. Структурная схема устройства ЧПК на вычитающем потенциалоскопе
Действительно,
сигналы от таких целей на выходе
потенциалоскопа
будут представлять собой радиоимпульсы
с одинаковой амплитудой
и чередующейся от периода к периоду
начальной фазой 0 и
![]() .
При амплитудном детектировании на вход
второго устройства
ЧПК они будут подаваться в виде
последовательности ви-
.
При амплитудном детектировании на вход
второго устройства
ЧПК они будут подаваться в виде
последовательности ви-
деоимпульсов одинаковой амплитуды и полярности, а следовательно, будут скомпенсированы. Таким образом, в состав устройства ЧПК, кроме вычитающего потенциалоскопа должны входить (рис. 5.18):
устройство разделения входных и выходных сигналов, включающее фильтр-пробку и нагрузочный контур;
модулирующий гетеродин;
синхронный детектор;
усилители входных и выходных сигналов;
генератор спиральной развертки.
Фазосдвигающая цепь обеспечивает синфазность (или противофазность для сигналов с фазой π) сигналов и опорного напряжения на входе синхронного детектора.
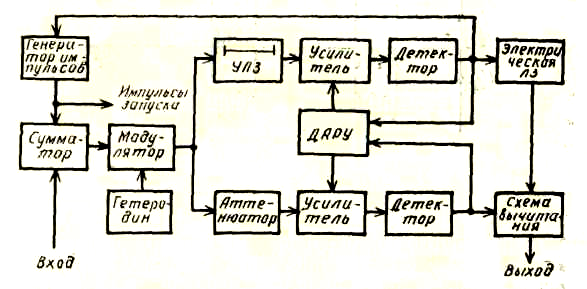
Рис. 5.19. Структурная схема устройства ЧПК на УЛЗ
Устройство ЧПК на ультразвуковых линиях задержки (рис. 5.19). Скорость распространения ультразвука значительно меньше скорости света (табл. 5.3), что позволяет реализовать достаточно большое время задержки при приемлемых размерах линии.
Таблица 5.3
|
Среда |
Скорость распространения ультразвука, м/с |
Затухание, дБ/см |
Температурный коэффициент изменения скорости при 20°С |
|
Вода
Ртуть
Плавленый кварц
Магниевые сплавы |
1500
1450
5450
5600 ... 5800 |
0,047
0,083
0,0068
0,1...0,2 |
2 • 10
2 • 10
-10
3 • 10
|
В УЛЗ (рис. 5.20) электромагнитная энергия преобразуется в энергию ультразвуковых колебаний с помощью входного пьезоэлектрического преобразователя (кристаллы кварца, титаната бария и т. п.). Выходной преобразователь осуществляет обратное преобразование. В качестве звукопровода могут применяться: ртуть, вода, алюминиево-магниевые сплавы, плавленый кварц, монокристаллы солей NaCl, KC1, BaF2 и т. д. Для уменьшения габаритов линии в ней используются многократные отражения.

Рис. 5.20. Основные элементы УЛЗ: 1 — входной преобразователь; 2 — ультра-звукопровод; 3—выходной преобразователь; 4—направление распространения
ультразвуковых колебаний
К УЛЗ предъявляются следующие основные требования:
минимально возможные искажения и ослабление задерживаемых сигналов;
минимальный уровень паразитных отражений;

Для обеспечения первого требования пьезоэлектрический преобразователь дол-
жен возбуждаться радиоимпульсами.
Дело
в том, что полоса
пропускания преобразователя
![]()
Рис.
5.21. Иллюстрация принципа переноса
спектра видеосигналов в область
радиочастот![]()
![]() Следовательно,
при некотором сравнительно высоком
Следовательно,
при некотором сравнительно высоком
значении резонансной частоты пьезоэлектрика (в настоящее время имеется принципиальная возможность повышать резонансную частоту до сотен и даже тысяч мегагерц) полоса, пропускания преобразователя будет намного шире спектра задерживаемых сигналов. Поэтому, если такой пьезоэлектрик возбуждать радиоимпульсами на частоте, близкой или равной его ре-
зонансной частоте, искажений передаваемых сигналов будут сведены к минимуму. Видеоимпульсы с выхода фазового детектора преобразовываются в радиоимпульсы с помощью модулирующего гетеродина и модулятора. Принцип преобразования иллюстрируется эпюрами (рис. 5.21). Коэффициент модуляции выбирается порядка 0,6... 0,7 для линейного детектирования сигналов, прошедших УЛЗ (после их усиления); симметрии положительных и отрицательных импульсов.
Ослабление сигналов при прохождении через УЛЗ вызывается затуханием энергии сигналов в преобразователях, среде и отражателях (для линий задержек с многократным отражением). Практически величина ослабления сигнала, обусловленная рассогласованием преобразователей со средой, составляет 30... 40дБ. Потери энергии в среде звукопровода (коэффициент ослабления) пропорциональны квадрату частоты:
![]()
где
![]() —
коэффициент, зависящий от вида среды
(для ртути
—
коэффициент, зависящий от вида среды
(для ртути
a
= 0,04, плавленого кварца
![]() =
0,007);
=
0,007);
f — частота, МГц;
![]() —
длина звукопровода,
м.
—
длина звукопровода,
м.
Чтобы уменьшить потери, несущую частоту сигналов желательно иметь возможно более низкой. Но при этом, как отмечалось выше, увеличивается степень искажения сигналов в преобразователях. Поэтому при выборе величины несущей частоты сигналов необходимо учитывать два противоречивых требования и искать компромиссное решение. Обычно сигналы задерживаются на частотах от 5 до 35 МГц.
Величина потерь, обусловленных рассеянием энергии, зависит от способа обработки отражающей поверхности. При отражении от полированной поверхности этими потерями можно пренебречь. Суммарный коэффициент ослабления сигналов при прохождении через УЛЗ может достигать 60 ... 70 дБ. Поэтому после УЛЗ необходимо усиливать сигналы до уровня, достаточного для линейного детектирования или для нормальной работы последующих устройств.
В любой реальной линии задержки при передаче сигналов имеют место многократные паразитные отражения ультразвуковой энергии, возникающие на границе сред с различными акустическими сопротивлениями. Источниками этих отражений могут быть приемный и передающий преобразователи, торцы звукопровода, держатели преобразователей и другие конструктивные элементы линии. Наибольшую опасность представляет паразитный сигнал с тройной задержкой, возникающий в результате двукратного отражения ультразвука (от выходного и входного преобразователей). Уменьшение влияния паразитных отражений может быть
достигнуто поглощением отраженной энергии непосредственно в звукопроводе или в пространстве за преобразователями.
Сущность первого способа заключается в обеспечении такого затухания энергии в линии, при котором отражения, вторично попадая на выходной преобразователь, не превышали бы уровень шумов. Необходимое ослабление отражений достигается подбором вида звукопроводящей среды и несущей частоты передаваемых сигналов.
Поглощение энергии отражений в пространстве за преобразователем достигается с помощью поглощающих насадок, представляющих собой геометрические тела особой конфигурации, исключающие попадание паразитных отражений в звукопровод.
Важным
при реализации устройств ЧПК
является обеспечение
равенства
периода повторения импульсов
![]() суммарному
времени задержки
в УЛЗ
суммарному
времени задержки
в УЛЗ
![]() и
компенсирующем усилителе
и
компенсирующем усилителе![]() .
Одна из
.
Одна из
возможных
причин неравенства — зависимость
времени
![]() от
от
температуры.
Например, при температурном коэффициенте
изменения задержки,
равном 10-4,
относительное изменение времени задержки
при изменении температуры на 10°С составит
![]() 0,1%
(при
0,1%
(при
![]() =2000
мкс,
=2000
мкс,
![]() =
2 мкс).
Чтобы
обеспечить равенство
=
2 мкс).
Чтобы
обеспечить равенство
![]() ,
целесообразно использовать для
регулирования
периода повторения импульсов ту же УЛЗ,
которая применяется
для ЧПК. Каналы синхронизации и компенсации
могут
быть разделены временным или частотным
методами. В первом
случае импульсы, синхронизирующие
генератор импульсов
запуска,
должны быть расположены вне интервала
действия сигнальных
импульсов, например, перед излучением
очередного зондирующего
импульса. Во втором случае допускается
одновременная
циркуляция, но по разным частотным
каналам, что возможно
при соответствующей ширине полосы
частот
УЛЗ.
Из-за наличия
задержки при запуске генератора (около
0,1 мкс) период повторения
импульсов синхронизации
,
целесообразно использовать для
регулирования
периода повторения импульсов ту же УЛЗ,
которая применяется
для ЧПК. Каналы синхронизации и компенсации
могут
быть разделены временным или частотным
методами. В первом
случае импульсы, синхронизирующие
генератор импульсов
запуска,
должны быть расположены вне интервала
действия сигнальных
импульсов, например, перед излучением
очередного зондирующего
импульса. Во втором случае допускается
одновременная
циркуляция, но по разным частотным
каналам, что возможно
при соответствующей ширине полосы
частот
УЛЗ.
Из-за наличия
задержки при запуске генератора (около
0,1 мкс) период повторения
импульсов синхронизации
![]()
где
![]() —
задержка при запуске.
—
задержка при запуске.
С
целью обеспечения идентичности
амплитудно-частотных характеристик
задерживающего и прямого каналов в
состав последнего
вводят аттенюатор, имитирующий затухание
в УЛЗ, и компенсирующий
усилитель, подобный используемому после
УЛЗ. Для
компенсации действия дополнительной
задержки
![]() и
задержки
в компенсирующем усилителе прямого
канала после детектора
включается специальная (обычно
регулируемая электрическая) линия
задержки с временем задержки
и
задержки
в компенсирующем усилителе прямого
канала после детектора
включается специальная (обычно
регулируемая электрическая) линия
задержки с временем задержки
![]() ,
равным
,
равным![]()
Равенство коэффициентов усиления задерживающего и прямого каналов поддерживается с помощью дифференциальной АРУ
с
постоянной времени, значительно большей
![]() Усиление
одного из каналов
(рис.5.19) автоматически регулируется
управляющим напряжением,
пропорциональным разности уровней
напряжений несущей
частоты в задерживающем и прямом каналах.
Усиление может
регулироваться и одновременно в обоих
каналах, но только
в противоположных направлениях.
Усиление
одного из каналов
(рис.5.19) автоматически регулируется
управляющим напряжением,
пропорциональным разности уровней
напряжений несущей
частоты в задерживающем и прямом каналах.
Усиление может
регулироваться и одновременно в обоих
каналах, но только
в противоположных направлениях.

В качестве схемы вычитания в устройстве ЧПК на УЛЗ может применяться дифференциальный детектор (рис. 5.22). Если обе половины дифференциального детектора имеют одинаковые параметры и характеристики, то сигнал на выходе детектора
![]()
где
![]() —коэффициент
пе-
—коэффициент
пе-
Рис.
5.22. Дифференциальный
детектор
![]() ,
,
![]() —
ампли-
—
ампли-
туды соответственно задержанного и прямого сигналов на входах дифференциального детектора.
Рассматривая работу дифференциального детектора, не трудно убедиться, что некомпенсированные сигналы могут быть как положительной, так и отрицательной полярности. Дальнейшее их усиление и преобразование определяется кратностью вычитания и особенностями устройства накопления сигналов (индикатора).