

Глава 14 особенности построения рлс с широкополосными зондирующими сигналами
14.1. ОБЩИЕ СВЕДЕНИЯ О ШИРОКОПОЛОСНЫХ СИГНАЛАХ
Широкополосными (сложными) сигналами наливают сигналы ширина спектра которых значительно превышает величину \/хк.
Основными их преимуществам» являются:
возможность значительного повышения энергии зондирующего импульса за счет увеличения его длительности при сохранении иыеокой разрешающей способности и точности измерения д
поста;
возможность работы нескольких РЛС в одном и том же частотном диапазоне без существенного взаимного влияния.
Для расширения спектра сигнала можно использовать модуляцию высокочастотных колебаний в пределах импульса ■—амплитудную, частотную (фазовую), амплитудно-частотную, в частности шумовую, С точки зрения оптимальности энергетического режима работы передатчика наиболее приемлемой является частотная (фазовая) модуляция. Поэтому в данной главе будут рассмотрены особенности построения РЛС только с частотно-модулированными и фаломанииулпровашшмн зондирующими сигналами.
14.2. ВИДЫ ЧАСТОТНОЙ МОДУЛЯЦИИ И ИХ ХАРАКТЕРИСТИКА
В РЛС с частотно-модулированным сигналом возможно применение зондирующих импульсов с линейной чзстоттй модуляцией (ЛЧМИ), частотной модуляцией по У-образному закону, нелинейным законом изменения частоты, частотной манипуляцией.
Сигналы с линейной частотной модуляцией. Мгновенная частота заполнения таких сигналов меняется по линейном)' закон)-.
Достоинство ЛЧМИ—сравнительная простота технической реализаций устройств, обеспечивающих их формирование и оптимальную фильтрацию.
Недостатки:
сильная взаимная саязь нараметро» а.тнала, характеризующих дальность н доплероиский сднцг, приводящая к неоднозначности измерения дальности при неизвестной скорости цели и наоборот;
появление дополнительных потерь за счет рассогласования частотной характеристики линейной части приемника и спектра отраженного сигнала из-ла необходимости использования весовой
278
обработки для уменьшения уровня боковых лепестков сжатого им-пульса до приемлемого уровня.
В РЛС обнаружения неоднозначность дальность—скорость проявляется следующим образом. Доплеровское смещение частоты отраженного сигнала вызывает смещение выходного импульса оптимального фильтра по времени. Так как доплеровское смещение частоты заранее неизвестно, то смещение сжатого импульса по времени приводит к так называемой скоростной ошибке определения времени запаздывания отраженного сигнала Л£ -•= /"дт^/П,, -== 2г',-т,т/лПц, где П„ -ширина спектра ЛЧМИ (при больших значениях произведения П„ти ширина спектра ЛЧМИ примерно равна девиации частоты Д/дев).
Ошибка определения времени запаздывания приводит к ошибке измерения дальности \R = oAt/2 = сцгти/ЛПи.
Из последнего соотношения видно, что при всех прочих равных условиях ошибка измерения дальности при использовании ЛЧЛШ тем меньше, чем больше девиация частоты в пределах импульса.
В РЛС, предназначенных для обнаружения средств воздушного нападения, этой ошибкой в большинстве случаев можно пренебречь. Вместе е тем свойство ЛЧМИ, связанное с сильной взаимосвязью между дальностью и скоростью, может с успехом использоваться а целях упрощения технической реализации ряда устройств, например, анализаторов спектра пли измерителей частоты |-11 |.
У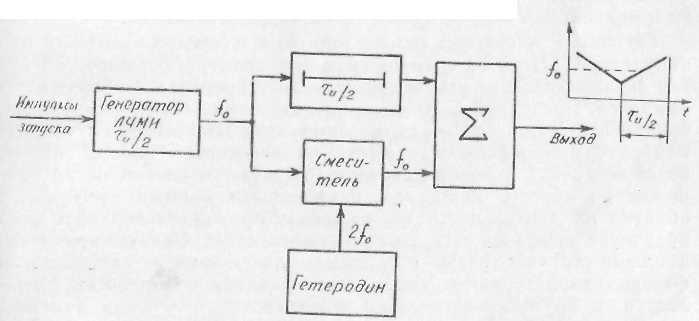
Рис. 14.1, Устройство формирования сигпалоп г К-образпым законом частотной
модуляции
Сигналы с частотной модуляцией по И-образному закону. Принцип формирования таких сигналов иллюстрируется рис. 14.1. Достоинством их в сравнении с ЛЧДШ является возможность исклю-
279
чёппя скоростной ошибки в связи с симметричным характером модуляционной характеристики.
Недостатки:
при одновременном наличии п антенном луче нескольких целей может возникнуть неоднозначность в измерении их дальности;
некоторое усложнение устройств формирования и обработки сигналов.
Сигналы с нелинейным законом изменения частоты. Использование нелинейных законов изменения частоты в пределах импульса позволяет получить шумоподобмый сигнал с телом неопределенности, близким по форме к идеальному. При этом можно избежать потерь в отношении сигнал—шум, связанных с весовой обработкой ЛЧМИ. Недостатками сигналов с нелинейной ЧМ являются:
возрастание сложности РЛС из-за возможной необходимости, использования многоканальной обработки отраженных от целе'й сигналов;
недостаточный уровень разработки устройств для генерации сигналов с нелинейной ЧМ [43];
необходимость подбора и разработки специального закона ЧМ в тех случаях, когда требуется обеспечить заданный уровень боковых лепестков.
Вследствие большой крутизны главных сечений чела неопределенности в области основного пика сигналы-с нелинейной ЧМ наиболее полезны в системах сопровождения, где значения дальности и радиальной скорости цели приближенно известны.
Сигналы с частотной манипуляцией. Сигналы с частотной манипуляцией (частотно-временным кодированием) формируются путем скачкообразного изменения частоты в пределах зондирующего импульса. Последний состоит из последовательности .V импульсов, причем несущая частота каждого импульса выбирается случайным или детерминированным образом из некоторого набора частот, перекрывающих рабочий диапазон РЛС. В том случае, когда смещение по частоте между соседними парциальными импульсами обратно их длительности (А/=1/тял), принципиально возможно получение коэффициента сжатия, равного N2. Однако при этом, с одной стороны, резко возрастают требования к стабильности фазовых характеристик систем формировании и обработки сигналов, а, с другой, исключается возможность получения большой ширины спектра из-за ограниченности интервала когерентности по частоте.
Па практике, как правило, находят применение сигналы с частотным разносом парциальных импульсов Af ~> 1/тэл (так называемые многочастотные сигналы). Каждый отраженный парциальный импульс при этом обрабатывается своим частотным каналом, выходы которых объединяются на видеочастоте.
280
i4.fi. особенности построения системы формирования
.ШНДИРУКНЦИХ СИГНАЛОВ (; ЧАСТОТНОЙ МОДУЛЯЦИЕЙ
В РЛС с частотной модуляцией зондирующих сигналов передающее устройство практически всегда выполняется по схеме задающий генератор—усилитель мощное* и. Это связано в одних случаях (например, в РЛС с ЛЧМИ) с необходимостью обеспечения жестких требований к стабильности закона изменения частоты Внутри импульса, а в других (например, в РЛС с многочастотным сигналом)—с упрощением технической реализации передатчика.
Рис.
14,2. Задающий генератор ЛЧМИ
Таблица 1-1.1
|
Тип управ-1яемого напряжением геис- |
Несуща я частота, МГц |
|
Максимальная нелинейность |
Максимальная относительная нестабильность |
|
£.С-геиератор |
. [о 50 |
115 |
±о,г> |
± (10-5... in -.1) |
|
Кварцевый ге- Пера гор |
0,1 ...300 |
±0,25 |
±1 |
± (10-S... 10-5) |
|
Митрон |
103... Ю4 |
±50 |
±1 |
±2 . 10 з |
|
ЛОВ •'■ |
2.103-;;.-1,8. 10* |
±20 |
±1X3 |
±2 ■ 10-э |
2»!
Для повышения стабильности характеристик ЛЧМИ в схему (рис. 14.2) вводят устройство, осуществляющее фазовую автопод-стройку частоты колебаний генератора. В качестве эталонного сигнала при этом можно использовать выходной сигнал кодирующего фильтра (например, ДУЛЗ (рис. 14.3)). При необходимости (если
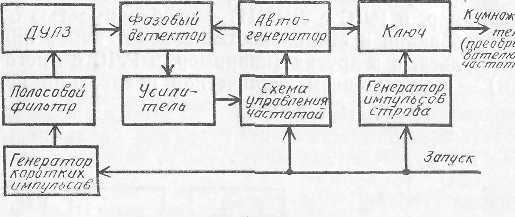
Рис. 14.!!. Задающий генератор ДЧМИ с фазовой явтопод
стройкой
ЗГ формирует колебания на рабочей частоте РЛС) между 31" и фазовым детектором системы ФАПЧ включают преобразователь частоты, осуществляющий перенос спектра сигнала ЗГ в область рабочих частот ДУЛЗ. Кодирующий фильтр обеспечивает формирование ЛЧМИ с заданными параметрами.
Возбуждение кодирующего фильтра происходит на его рабочей частоте. Вследствие неидеальности формы характеристики группового запаздывания кодирующего фильтра необходимо, чтобы частотный спектр возбуждающего импульса был ограничен.. С этой целью между генератором коротких импульсов и кодирующим фильтром включается полосовой фильтр с полосой Пф = Пи.<С ■С Л/кп (Д/кн — ширина спектра короткого импульса). В качестве кодирующего фильтра могут использоваться дисперсионные ультразвуковые линии задержки (ДУЛЗ) и электрические схемы с дисперсионными свойствами.
При разработке и изготовлении кодирующего фильтра стремятся обеспечить выполнение следующих требовании:
равномерность амплитудной характеристики во всей полосе частот шириной Пн;
линейный наклон характеристики группового запаздывания в пределах длительности зондирующего импульса т.,,;
малое затухание;
минимум искажении, что снижает уровень боковых лепестков отраженного от цели сигнала на выходе согласованного фильтра.
Краткие сведения об основных характеристиках различных типов кодирующих фильтров приведены в табл. 14.2.
|
|
|
|
|
|
Г |
а 6 л и ц а 14.2 |
|
Tim кодирующего фильтра |
п, МГц |
Г, MKt |
Ik |
/о. МГц |
Затухание, ДБ |
Уровень пара-лнтных С1П--налов, дК |
|
Полосковая ДУЛЗ: |
|
|
|
|
|
|
|
алюминиевая |
1 |
500 |
200 |
5 |
15 |
—60 |
|
стальваи |
20 |
350 |
,100 |
45 |
70 |
-55 |
|
Всепропускающаи схема |
40 |
1D00 |
■soo |
25 |
25 |
-40 |
|
Дифракционная ЛЗ: |
|
|
|
|
|
|
|
перпендикулярная |
40 |
75 |
1000 |
100 |
30 |
-45 |
|
на поверхностных волнах |
40 |
50 |
1000 |
ЮС |
70 |
—50 |
|
клинообразного типа |
250 |
65 |
100D |
500 |
50 |
■ ,10 |
|
Меандровая линия |
1000 |
1,5 |
1000 |
200(1 |
2.1 |
- -10 |
Дисперсионные характеристики полосковой УЛЗ определяются дисперсионной природой среды, г; которой распространяется волна. В остальных типах кодирующих фильтров используются недисперсионные среды и их дисперсионные характеристики определяются дифракционными свойствами входных и выходных преобразователей.
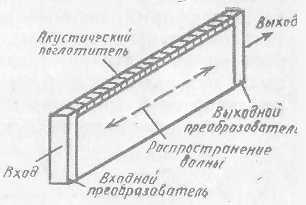
Рис. 14.4. Полосковая ДУЛЗ
Полосковая ДУ.ПЗ изготовляется из тонкой алтомиписвей или стальной полоски, причем преобразователи располагаются па противоположных концам полоски (рис. 14.4). Размеры полоски иыбп-раются равными: толщина Аи яй «s Хак/2 {hir. — акустическая длина волны для центральной частоты линейного участка ХГЗ), длина /и = г>аати (v&K — скорость распространения акустических ноли в ДУЛЗ), ширина не является критическим параметром, если выполняется- условие \1П ->
Так как полоска должна быть очень тонкой (порядка нескольких сотых миллиметра), а точное изготовление ее затруднительно, то обычно колосковую ДУЛЗ помещают в термостат. Регулировка температуры термостата позволяет подстроит], ЛЗ на необходимую рабочую частоту. Одна сторона полоски покрывается поглощающим материалом для устранения отражений, которые могут возбудить в линии отличные от продольных волны, что может при-
вести к появлению паразитных Сигналов. Если требуется, чтобы линейность ХГЗ полосковой линии лежала в пределах ±2 %, ширина полосы частот лилии должна составлять менее 10 % от центральной частоты /ц.
Алюминиевые иолосковые ЛЗ имеют самый низкий уровень затухания, по центральная частота и ширина полосы частот для них не могут быть высокими. Для получения временной протяженности ХГЗ, превышающей 50 мке, рабочие частоты этих линий должны быть меньше 5 МГц. Задержка па центральной частоте и алюминиевых полосках составляет 2,8 ... 4 мке/см.
Стальные полосковые ЛЗ имеют большое затухание, но в них можно получить более широкие рабочие полосы частот. Задержка на центральной частоте для стальных полосок лежит в диапазоне 3,6... 4,8 мке/см.
Всепропускающая схема временной задержки представляет собой четырехполюсник, у которого коэффициент усиления постоянен и требуемом диапазоне частот, а фазовый сдвиг квадратично зависит от частоты, что обеспечивает линейную зависимость задержки от частоты. Для обеспечения линейности в большом диапазоне частот используют каскадное соединение четырехполюсников, каждый из которых настраивают на несколько отличающиеся частоты.
В дифракционных ЛЗ на поверхностных волнах для создания линейной ХГЗ используются входные и выходные решетки электродов, сформированные на одной и той же поверхности пьезоэлектрической пластинки. Расстояние между электродами меняется по квадратичному закону. Изменяя ориентацию входных и выходных решеток и расстояние межд\ ними, можно изменять закон частотной модуляции и получать либо лппейпо-падающую, либо линейно-парастаюохую ХГЗ.
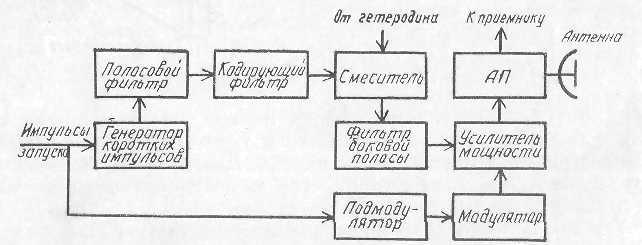
Рис. 14.5. Передающее устройство с кодирующим фильтром
Передающие устройства, в которых пассивный кодирующий фильтр непосредственно используется в качестве ЗГ (рис. 14.5), в основном находят применение в маломощных РЛС. Это объясняется тем, что из-за малой мощности выходных сигналов кодиру-
'Ж
ющсго фильтра (доли милливата) достижение приемлемой выходной мощтгости передатчика обеспечивается только лить при значительных коэффициентах усиления (« 90... 100 дБ) усилителя мощности. Из-за неизбежного увеличения числа каскадов возрастают требования к стабильности характеристик элементов усилителя мощности и возникает необходимость в принятии специальных мер по обеспечению развязки между входом и выходом усилительного тракта' во избежание регенеративных эффектов и самовозбуждения.

Рис.. 14.G. Задающий генератор с синтезатором частот
В РЛС с многочастотным сигналом гс качестве ЗГ используется управляемый синтезатор частот (рис. 14.6). Устройство управления структурой зондирующего сигнала обеспечивает формирование синтезатором требуемого набора частот и порядок их чередования в пределах зондирующего импульса. Длительность парциальных импульсов определяется длительностью импульсов стробов, подаваемых па ключи. Усилитель мощности является широкополосным и реализуется обычно па базе ЛБВ и амплитронов (см. т;абл. 10.1).
(4.4. ОСОБЕННОСТИ ПОСТРОЕНИЯ СИСТЕМЫ ОБРАБОТКИ ОТРАЖЕННЫХ СИГНАЛОВ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ
В РЛС с мпогочастотпыч зондирующим сигналом система обработки является многоканальной по частоте. Структура каждого канала практически не отличается от структуры системы обработки в одночастотных РЛС с узкополосным зондирующим сигналом, принципы построения которой рассмотрены ранее. Поэтому огра-
285
нвчнмся рассмотрением особенностей построения системы обработки в РЛС с ЛЧМИ.
Одним из основных элементов системы обработки является квазиоптимальный фильтр для ЛЧМИ, состоящий из полосового фильтра с полосой пропускания П„, и фильтра сжатия, ХГЗ которого должна быть зеркальной к закону изменения частоты ЛЧМИ, поступающего на его вход. Это требование может быть обеспечено путем применения в приемном тракте фильтра сжатия с ХГЗ, зеркальной к закону изменения частоты зондирующего импульса, или устройства инверсии закона частотной модуляции в сочетании с фильтром сжатия, ХГЗ которого совпадает с законом изменения частоты зондирующего импульса (рис. 14.7).
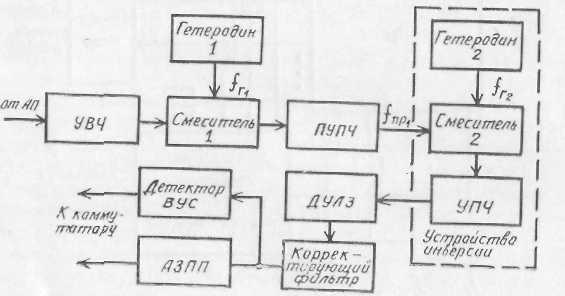
Рис. И.7. Синем л обработки ЛЧМИ cm на леи с нпверсней закеша частотной модуляции
Второму способу во многих случаях отдают предпочтение в связи с возможностью использования однотипных фильтров в системах формирования зондирующих и обработки отраженных сигналов.
Устройство инверсии закона частотной модуляции представляет собой преобразователь частоты с выделением нижней боковой полосы частот сигнала. Частота гетеродина fn превышает максимальное значение частоты ЛЧМИ на входе смесителя 2. Для того чтобы инверсирование закона осуществлялось без изменения не сущей {центральной) частоты ЛЧМИ fnpi, значение /та дол ж ни быть равно 2/прь
Вследствие прямоугольного характера амплитудного спектра ЛЧМИ огибающая сигнала па выходе фильтра сжатия имеет па-ряду с большим основным лепестком более слабые, по все же достаточно интенсивные боковые лепестки по дальности. Например, если П„Тц > 30, то первый боковой лепесток имеет уровень —13 дБ относительно максимума сигнала. Уровень следующего лепестка
приблизительно па 4 д[3 ниже уровня предыдущего и т. д. Эти бо-ковые лепестки являются источником взаимных помех при наличии в соседних интервалах дальности двух пли более сигналов и могут ограничить эффективный динамический диапазон радиолокационного приемника при приеме сигналов от больших целей. Чтобы ослабить боковые лепестки, необходимо в приемный тракт включить фильтр с плавно спадающей ЛЧХ — корректирующий фильтр.
Примером последнего может быть фильтр с колокольной ЛЧХ (гауссов фильтр) К (/) = ехр {— л [(/ — Ы/П([,]2}, где Пф — полоса пропускания фильтра на уровне 0,46. По мере сужения полосы пропускания фильтра заметно уменьшается уровень боковых
(П = Л/леп/Пф —ОТ-
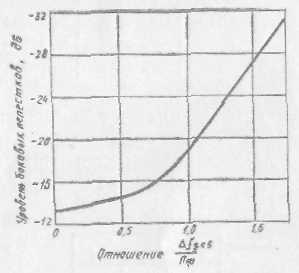
лепестков (рис. 14.8). Так, уже при п = 1,3 ношение девиации частоты к полосе пропускания фильтра) величина пер-, вого бокового лепестка уменьшаете л па 10 дБ.
Ослабление боковых лепестков сопровождается расширением основного лепестка. Однако оно является сравнительно небольшим. Подавление боко-пых лепестков при применении гауссова фильтра приводит также к ухудшению отношения сигнал—шум па 1...2 дБ.
Рис. 14.8. Зависимость уровня боковых лепесткоп сжаюгп импульса от относительной полосы пропускания корректирующего фильтра с колокольной АЧХ
Большее ослабление боковых лепестков выходного сигнала можно получить путем специальной весовой обработки, например, С помощью фильтра с ЛЧХ вида
![]() (14.1)
(14.1)
где р. — функция пьедестала. При соответствующих значениях параметров п и |i. уровень боковых лепестков можно снизить до 40 дБ (табл. 14.3).
Иногда подбирают частотную характеристику таким образом, чтобы уменьшить дальние боковые лепестки, допускай большой уровень лепестков около сжатого импульса.
АЧХ, близкую к (14.1), можно получить с помощью так называемого трансверсального фильтра (рис. 14.9), в состав которого входят широкополосная недисперсионная линия задержки на промежуточной частоте с отводами через 1/П„, устройства управ-
287
ления амплитудой и фазой сигналов в каждом отводе и сумматор. Значения комплексных весовых коэффициентов в каждом отводе устанавливаются в соответствии с выбранными значениями параметров а и ц и количеством отводов.
Т и 6 л и u a I4.3
|
Параметры час- |
1 ... Параметры сжатого импульса |
|||
|
тотное харак къ- рнгтики |
Кадффицнеи г расширения, им пульса |
Максимальный уровень Оокопого .ric пест и а |
Ухудшение.,. о] ношения сигнал -шум, дБ |
|
|
11 |
|
|||
|
1 |
0,01 |
1,30 |
—23 |
11,82 |
|
2 |
0,011 |
1,59 |
—32,2 |
1.76 |
|
2 |
0,08 |
1,50 |
—42,8 |
1,34 |
|
2 |
0,10 |
1,41 |
—34,0 |
1,01 |
|
■3 |
0,02 |
1.80 |
—40.8 |
2,23 |
|
■1 |
П,0| |
2,00 |
—43.5 |
2,78 |
Необходимость включения корректирующего фильтра н приемный тракт приводит к потерям, обусловленным отличием формы АЧХ линейной части приемника от оптимальном. Числовое значение коэффициента £.Рфа, учитывающего эти потери, составляет 1 ... 2 дБ.
Рис I 1 9 CTpj к i \ рная схема i рансверсалыгато филы ■ на
Потери
f-рфз.
обусловленные
неоптн-мальпоетыо
фазочастотной
характерис тики
приемники, имеют место, если фазовая
характеристика фильтра
сжатия
неточно
сопряжена
с
фазовым спектром
ЛЧМИ,
Примером
такого рассогласования
может служить случай, когда ХГЗ фильтра
имеет другом наклон по
сравнению
с
законом изменения частоты в
ЛЧМИ,
Числовое значение коэффициента
потерь L]h,|m
в некоторых случаях может
достигать
грех
л более децибел.
Для стабилизации частоты ложных гревот и защиты от импульсных поме.х
с другим законом впутриимпульсной модуляции перед фильтром сжатия включают ограничитель. При этом качество обнаружения несколько ухудшается. Однако если база сигнала превышает 30, то потери в отношении сигнал—шум не превышают одного деци бели даже в тех случаях, когда ограничение производится на уровне эффективного значения шума.
Вследствие эффекта подавления п ограничителе слабого сиг нала сильным эхо-сигналом вероятность обнаружения слабого
сигнала быстро уменьшается при увеличении степени перекрытия сигналов (уменьшении расстояния между сильной и слабой целями), если после фильтра сжатия установлен фиксированные порог обнаружения. Это уменьшение вероятности обнаружения связано не с ухудшением отношения сигнал—шум для слабого сигнала, ас подавлением и слабого сигнала, и шума в области, охватывающей временную длительность сильного сигнала. Влияние этого эффекта можно ослабить, если после фильтра сжатия включить логарифмический обнаружитель с ПЧЛТ, рассмотренный в §9.13. Устройства защиты от активных и пассивных помех r РЛС с ЛЧМИ по принципам построении и функциональной структуре такие же, как н в РЛС с узкополосным зондирующим сигналом. Следует лишь иметь в виду, что устройства защиты от АШМП по основному и боковым лепесткам диаграммы направленности (поляризационные и пространственные АК) целесообразно включать до фильтра сжатия. В противном случае последним нужно включать и в дополнительные каналы приема.
Если передатчик РЛС с ЛЧМИ не обеспечивает достаточно высокую стабильность несущей частоты и закона ее изменения, то для сведения к минимуму ошибки измерения дальности, обусловленной неоднозначностью дальность—скорость, импульсы запуска оконечных устройств должны формироваться из ослабленных зондирующих сигналов, прошедших фильтр сжатия.
14.5. КОДЫ, ИСПОЛЬЗУЕМЫЕ В РЛС С ФАЗОМАНИПУЛ ИРОВАННЫМИ ЗОНДИРУЮЩИМИ СИГНАЛАМИ
Особенности сигналов с ФКМ. В отличие от сигналов с ЛЧМ сигналы с ФКМ имеют идеальную форму корреляционной функиин с минимальной площадью эллипса неопределенности.
Другим достоинством сигналов с ФКМ является то, что схемы формирования и генерирования длинных сигналов с ФКМ в большинстве случаев оказываются более простыми, чем при использовании ЛЧМ (44).
Поскольку характеристики сигналов, а также степень простоты технической реализации схем формирования и обработки сигналов с ФКМ зависят от вида кода фазовой манипуляции, при разработке РЛС выбор соответствующего кода является важной :ш-дачей.
Рассмотрим особенности основных видов кодов.
Бинарные фазовые коды. Бинарный фазовый код представляет собой последовательность 1 и 0, +1 и —1. Фаза излучаемого РЛС сигнала изменяется попеременно, принимая значения 0 или 1^0° в соответствии с чередованием элементов 1 и 0 или +1 и -1 в фазовом коде.
Коды Баркера. Специальный класс бинарных кодов составляют оптимальные коды или коды Баркера [43]. Их оптимальность ;ia- 19. Зак. 88. :!89
ключается в том, что амплитуда пика автокорреляционной функции равна N, а амплитуда боковых лепестков ^ 1 (здесь N — число парциальных импульсов в сигнале с ФКМ или длина кода). Существует лишь небольшое число таких кодов (табл.' 14.4).
Таблица 14.4
|
Длина кода |
Эдсмен i ы кода |
Относительный уровень боковых лепестков, дБ |
|
2 3 •1 т> 7 11 13 |
т + — -■- + + — + + + + - + + -г ■ 1 1 |
—6 —9,5 —12 — 1й,Э —20,8 —22,3 |
Изменение знаков элементов кода на противоположный для всех Л' даст коды, обладающие точно такими же автокорреляционными функциями.
При Рд Ф- 0 наблюдаются высокие побочные максимуму тела неопределенности сигнала. В связи с этим коды Баркера целесообразно применят!, при известней и.ш малой частоте Доплера Гц.
Последовательности максимальной длины (М-последователь-ности). Эти последовательности представляют собой набор N периодически повторяющиеся символов </,-, каждый из которых может принимать одно из двух значений: -|-I пли -1.
Значение каждого последующего символа определяется взятым t противоположным знаком произведением значений двух или большего числа (но всегда четного) предыдущих символов: </; = = —di-ndi -„, ■■■ di-id;-h, причем п >■ w >...>/> к > 1.
Б частном случае диух сомножителей d: = di-:id;-u-
При правильном выборе чисел т, ,.., I и к такой код будет иметь следующие специфические свойства.
Во-первых, период кода равен ;V = 2" — 1, где п ■ ■ число разрядов сдвигового регистра и генераторе кода.
В течение периода кода образуется неповторяющаяся элементарная последовательность {с!,} из /V символов. Во-вторых, раз-ппеть между числами отрицательных и положительных символов всегда равна единице. В ipeibiix, в результате умножения кода на такой же, ко задержанный код, получается первоначальный код с новой задержкой.
Корреляционная функция М-последовательности имеет максимальное значение, paling' ,V, и у ровен!. боковым лепестков, не
превышающий Л'1'2. Последовательность может быть конечной и ограничиваться одним периодом либо состоять из нескольких периодов. В непрерывном режиме это будет бесконечная последовательность. Формирование М-последовэтельноети наиболее удобно и просто осуществлять с помощью регистров сдвига с линейными обратными связями.
Многофазные коды. При многофазном кодировании фаза несущей частоты сигнала меняется в большом диапазоне, принимая, например, значения 0, 120, 240° и т. д. Примером многофазных кодов являются коды Фрэнка.
Для построения кода Фрэнка используется матрица, имеющая следующую общую структуру:
0 0 0 ..- 0
0 1 2 ... N — 1
О 2 4 ... 2 (N — I)
0 N - 1 2 (N— 1) ... (Л'— \)?-
Эту матрицу можно читать как по строкам, так и по столбцам. Ее элементы представляют собой коэффициенты — сомножители основного фазового угла 2лр/Лг, где р и .V — целые и взаимно простые числа. Кодовая последовательность образуется путем размещения строк или столбцов последовательно друг за другом. При этом получается последовательность, содержащая Л'2 элементов." Например, при р = 1 и N -= 3 получаем последовательность О', 0, 0, 0, 1. 2, 0, 2, I.
Элементы этой последовательности представляют собой числа по модулю N (т. с. 3). Закон чередования фаз парциальных импульсов, соответствующий записанной последовательности, имеет кпд {<р,-} = 0, 0, 0, 0," 120, 210. 0, 240, 120".
Автокорреляционная функция рассматриваемой последовательности для периодической ее структуры имеет нулевой уровень боковых лепестков по оси времени. Для апериодической последовательности относительный уровень боковых лепестков при большом значении 'N составляет д-'А"''2. Это примерно па 10 дБ меньше уровня боковых лепестков бинарных кодированных сигналов той же длины. Однако характеристики многофазных кодов быстро ухудшаются при налички диплеровского сдвига частоты (относительный уровень боковых лепестков при определенных условиях может достигать 0.3... 0,4). Эта особенность многофазных кодов в значительной степени ограничивает область их применения ситуациями, в которых донлеропекпй СДВИГ мал или им можно пренебречь.
14 6. ОСОБЕННОСТИ ПОСТРОЕНИЯ СИСТЕМ ФОРМИРОВАНИЯ
ЗОНДИРУЮЩИХ ФКМ СИГНАЛОВ
Передающее vcrponcnio н РЛС с зондирующим ФКМ сигналам всегда выполняется по схеме задающий генератор — усилитель мощности'. Задающий генератор может быть реализован либо на основе формирующего фильтра с линией задержки, в отводы кб-1'орой включены фазовращатели, изменяющие фазу парциального импульса а соответствии с кодом (рис. 14.10а), либо па основе формирователя видеокода, управляющего ключами (рис. 14.106).


Рис. 14.10 Задающий генератор фэзематгаулировашюго сигнала: а — на основе формирующего фильтра с линией задержки; б— с формирователем видеокода
Функционально необходимым элементом системы формирования является преобразователь частоты, обеспечивающий перепое спектра сигнала ЗГ в область рабочих частот РЛС. Это объясняется тем, что частота ЗГ ограничивается либо рабочей частотой линии задержки (обычно ультразвуковой), либо частотой кварца. При приемлемых зтгачениях длительности парциальных импульсовtb.-i база ФКМ сигналов может быть увеличена только лишь за счет
292
увеличения числа парциальных импульсов и, следовательно, т„ = — Л'т!,.-!. С увеличением т.и возрастают требования к стабильности частоты зондирующего сигнала Р.ПС (см. § 5.7), что и диктует необходимость использования кварцевых генераторов для формирования исходных колебаний.
Усилитель мощности должен обеспечивать возможность уепле-цяя сигналов большой длительности при минимальных искажениях их фазовой структуры
14.7. особенности построения системы обработки Отраженных фкм сигналов
Отличительной особенностью Системы обработки ФКМ сигналов так же, как и ЛЧМ сигналов, является наличие фильтра сжатия. Такой фильтр включается после УПЧ. епгласонапного со спектром парциального импульса, и реализуется на .■ниши задержки с отводами через т.,.,. В отводы линии включаются фазоираща-тели, обеспечивающие изменение фазы в порядке, обратном закону ее изменения в отраженном сигнале.
В остальном структура системы обработки такая же, как и в Р.МС с ЛЧМИ.