

10.2. Основные типы передающих устройств и их сравнительная характеристика
Основным элементом системы формирования зондирующих сигналов является передающее устройство. Существуют два основных типа передающих устройств, применяемых в РЛС: мощный автогенератор (рис. 10.1а) и задающий генератор—усилитель мощности (рис. 10.1б). Задающий генератор, как правило, выполняется по схеме, обеспечивающей одновременное формирование колебаний с частотами fс и fмг (рис. 10.2), а в ряде случаев и с частотой Fп (при использовании в РЛС истинной внутренней когерентности).
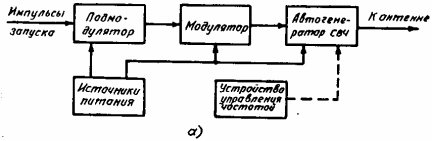

Рис. 10.1. Упрощённые структурные схемы передающих устройств:
а — с мощным автогенератором; б — с задающим генератором и усилителем мощности
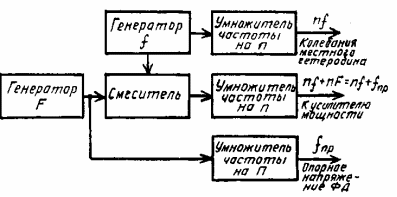
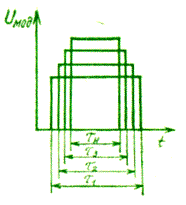
Рис. 10.2. Структурная схема задающего генератора
Подмодулятор формирует импульсы запуска модулятора, a модулятор — мощные видеоимпульсы заданной амплитуды, полярности и длительности. В общем случае каждое усилительное звено должно иметь отдельные подмодулятор и модулятор. В последующем усилительном звене модулирующий импульс должен быть короче по длительности и больше по амплитуде (рис. 10.3). Это связано с необходимостью устранения или существенного ослабления влияния переходных процессов в усилительных звеньях на параметры зондирующего сигнала и обеспечения необходимой мощности на выходе каждого усилительного звена.
Рис. 10.3. Вид модулирующих импульсов в усилительных звеньях
В оконечном каскаде должен использоваться усилительный прибор с максимально возможным КПД, поскольку КПД всей усилительной цепочки определяется в основном КПД оконечного каскада.
Основным требованием к усилительным приборам, используемым в первых звеньях усилительной цепочки, является обеспечение максимального коэффициента усиления. К КПД этих приборов предъявляются менее жесткие требования.
Конструктивные характеристики передающего устройства в основном зависят от типа лампы высокой частоты, использующейся а качестве мощного автогенератора или усилителя мощности.
Напряжение на аноде (коллекторе) лампы определяет размеры и стоимость высоковольтного источника питания и модулятора, а также интенсивность рентгеновского излучения. Необходимость принятия мер для защиты обслуживающего персонала от излучения связана с неизбежным увеличением массы передающего устройства.
Коэффициент усиления лампы определяет необходимое число каскадов усиления и, следовательно, степень сложности усилительной цепочки.
Полоса пропускания влияет ни сложность системы перестройки рабочей частоты РЛС.
Коэффициент полезного действия лампы оказывает существенное влияние на массу и стоимость передающего устройства, на требования к системе охлаждения и мощности первичных источников питания. С уменьшением КПД увеличивается необходимое число каскадов усиления и энергия, превращающаяся в тепловую.
Интенсивность паразитных колебаний и шумов определяет необходимость принятия специальных мер по их снижению на выходе тракта высокой частоты па передачу.
Управляющий электрод лампы определяет требуемый тип модулятора, в свою очередь определяющего габариты, массу, стоимость и сложность передатчика.
Требования к магнитному полю определяют размер, массу и КПД передающего устройства.
Стабильность частоты или чувствительность по фазовой модуляции в значительной степени влияют на сложность системы стабилизации параметров передающего устройства.
В качестве иллюстрации в табл. 10.1 представлены данные о некоторых характеристиках наиболее распространённых типов усилительных ламп.
Использование в РЛС того или иного типа передающего устройства определяется тем, в какой мере оно обеспечивает реализацию требований, предъявляемых к параметрам зондирующего сигнала.
Возможности основных типов передающих устройств оценим, используя следующие критерии.
1) Точность установки и стабильность несущей частоты. В автогенераторе основными источниками нестабильностей является: пульсации высоковольтного напряжения и напряжения накала, механические вибрации, изменение нагрузки вследствие изменения сопротивления антенно-волноводного тракта. Последнее особенно существенно в РЛС метрового диапазона, у которых из-за влияния земли изменяется сопротивление излучения антенны при её вращении. От пульсаций высоковольтного напряжения зависит стабильность частоты от импульса к импульсу, а от наклона вершины модулирующего импульса – внутриимпульсное изменение частоты.
Типичные значения чувствительности по частотной модуляции для некоторых типов генераторных ламп приведены в табл. 10.2.
Во втором варианте передающего устройства основным видом нестабильностей является фазовая нестабильность в усилителе мощности, обусловленная изменением питающих напряжений. Пульсации высоковольтного напряжения определяют стабильность начальной фазы, а наклон вершины модулирующего импульса – внутриимпульсное изменение фазы. Типичные значения чувствительности по фазовой модуляции для основных видов усилительных ламп приведены в табл. 10.2.
Таблица 10.1.
|
Характеристика |
Тип лампы |
|||||
|
Клистрон |
ЛБВ |
Амплитрон |
Триод |
|||
|
Напряжение
Усиление, дБ
Полоса пропускания, %
КПД, %
Масса, габариты
Паразитные шумы,дБ
Паразитные типы колебаний
Управляющий электрод
Магнитное поле
Стоимость |
Высокое (для получения Ри = 1 Мвт требуется при- близительно 90 КВ)
30…70
1…8 10…15
15…60 (обычно 30)
Большие
- 90
отсутствуют В случае модуляции на анод отсутст- вуют
до пиковой мощности 100кВт защитная сетка
До Ри = 1 МВт постоянный магнит, в остальных случаях - солинойд
Средняя Высокая |
Низкое (для Ри = =1Мвт требуется приблизительно 40кВ)
6…10
10…15
30…75 (обычно45)
Малые
- 30…- 60
При включении без ВЧ возбуждения вы- ходные шумы полной мощности; при моду- ляции на катод коле- бания типа π на фрон- тах импульса
Нет
Постоянный магнит
Низкая |
Низкое
10…25
1…2
40…60
Малые
- 90
отсутствуют
Есть
Нет
Низкая |
|||
Таблица 10.2.
|
Тип лампы |
Чувствительность по частотной или фазовой модуляции |
Отношение динамического сопротивления к статическому |
Изменение тока или напряжения на 1 % изменения высоковольтного напряжения, % |
|
|
Линейный модулятор |
Модулятор низкого сопротивления |
|||
|
Магнетрон
Стабилит- рон
Амплитрон
Клистрон
ЛБВ
Триод |
Δf/f = (1…3)10-3ΔI/I
Δf/f = (2…5)10-4ΔI/I
Δφ = 0,4…1 на 1%ΔI/I
Δφ/φ = ΔE/2Е Δφ = 100 на 1% ΔE/Е
Δφ/φ = ΔE/3Е Δφ = 200 на 1% ΔE/Е
Δφ = 0…0,50 на 1% ΔI/I
|
0,05…0,1
0,05…0,1
0,05…0,1
0,67
0,67
1,0 |
ΔI/I = 2
ΔI/I = 2
ΔI/I = 2
ΔE/Е = 0,8
ΔE/Е = 0,8
ΔI/I = 1
|
ΔI/I = 10…20
ΔI/I = 10…20
ΔI/I = 10…20
ΔE/Е = 1
ΔE/Е = 1
ΔI/I = 1
|
Стабильность маломощного задающего генератора (ЗГ) может быть высокой, поскольку, во-первых, изменения сопротивления антенно-волноводного тракта из-за наличия усилителя мощности не сказываются на работе ЗГ, и, во-вторых, последний может быть кварцован. При этом несущая частота может быть практически мгновенно изменена путём электронного переключения нескольких ЗГ.
2) Обеспечение когерентности колебаний. Для обеспечения когерентности колебаний в передающем устройстве с мощным автогенератором должна быть предусмотрена его синхронизация с когерентным гетеродином. В устройстве с усилителем мощности фазовая синхронизация генератора и гетеродинов обеспечивается автоматически в процессе формирования зондирующего сигнала. Кроме того, как уже отмечалось выше, в таких устройствах возможна реализация истинной внутренней когерентности, при которой взаимно синхронизированы частота повторения импульсов, промежуточная и несущая частоты.
3) Синхронизация генератора. Для обеспечения надёжной синхронизации мощного автогенератора (такая задача возникает, например, в РЛС с ФАР) мощность синхронизирующего сигнала должна быть очень большой. Так, например, при допустимой ошибке фазовой синхронизации, равной 10°, мощность синхронизирующего сигнала должна быть на 30 дБ ниже мощности автогенератора. Для уменьшения ошибки синхронизации до 1° мощность синхронизирующего сигнала нужно увеличить на 15 дБ.
4) Возможность формирования широкополосных зондирующих сигналов (ШПС). В мощном автогенераторе возможности по формированию ШПС ограничиваются случаем частотной внутри импульсной модуляции. В передатчике с усилителем мощности ограничений на вид внутри импульсной модуляции нет.
5) Габариты и масса. За более высокую стабильность частоты передающего устройства с усилителем мощности приходится расплачиваться увеличением его габаритов, массы и усложнением конструкции. В общем случае такое передающее устройство имеет преимущества перед мощным автогенератором тогда, когда нужно получить большую выходную мощность или хорошие характеристики системы СДЦ. Если же основными требованиями являются снижение габаритов, уменьшение массы и упрощение аппаратуры, следует отдавать предпочтение автогенератору, даже если при этом ухудшаются другие характеристики РЛС.