

2.6. Упрощенные формы записи уравнения радиолокации
Если
дальность до цели выразить в километрах,
а эффективную
площадь приемной антенны и эффективную
поверхность цели
— в квадратных метрах, объединить
числовые значения постоянных
коэффициентов (имеются в виду
коэффициенты![]() 1,38•1023
Дж/К,
1,38•1023
Дж/К,
![]() = 290
К, входящие в
= 290
К, входящие в
![]() ,
и
,
и
![]() ),
то уравнение
радиолокации в режиме обзора будет
иметь вид
),
то уравнение
радиолокации в режиме обзора будет
иметь вид
![]()
где
1,99 ·10 =
![]() —
(коэффициент 1012
учитывает
переход от дальности в метрах к дальности
в километрах).
—
(коэффициент 1012
учитывает
переход от дальности в метрах к дальности
в километрах).
Дальнейшее упрощение предусматривает приведение уравнения к логарифмической форме и представление величин всех, параметров в децибелах относительно единиц измерения, оговоренных выше
![]()
В
каждом случае величина параметров в
децибелах вычисляется как
10![]() значения
соответствующего параметра и обозначается
тем
же символом, что и раньше, но заключенным
в круглые скобки. Основное
достоинство логарифмической формы
записи уравнения радиолокации
состоит в том, что она позволяет получить
ответ в кратчайшие
сроки при минимальной вероятности
возникновения ошибок в процессе
арифметических расчетов.
значения
соответствующего параметра и обозначается
тем
же символом, что и раньше, но заключенным
в круглые скобки. Основное
достоинство логарифмической формы
записи уравнения радиолокации
состоит в том, что она позволяет получить
ответ в кратчайшие
сроки при минимальной вероятности
возникновения ошибок в процессе
арифметических расчетов.
Глава 3. Основные характеристики радиолокационных целей
3.1. Общие сведения
В активной радиолокации с пассивным ответом основными характеристиками целей являются:
среднее
значение эффективной поверхности цели
(ЭПЦ)
![]() плотность
распределения вероятности ЭПЦ
плотность
распределения вероятности ЭПЦ
![]() или
плотность распределения
амплитуды отраженного сигнала
или
плотность распределения
амплитуды отраженного сигнала
![]() ;
;
энергетический
спектр флюктуации отраженного
сигнала
![]() ;
;
скорость
движения цели
![]() и
ее составляющие (радиальная скорость
и
ее составляющие (радиальная скорость
![]() ,
тангенциальная скорость
,
тангенциальная скорость
![]() );
);
линейные
размеры цели
![]() ;
;
априорное распределение целей в пространстве.
Все перечисленные характеристики в общем случае являются статистическими [30]. Без знания этих характеристик целей невозможно решить целый ряд практически важных задач, например, оценить расчетным путем боевые возможности РЛС в конкретной воздушно-помеховой обстановке или предъявить требования к параметрам ее трактов и систем с достаточной точностью.
3.2. Статистические модели целей
Статистические
характеристики цели
![]() и
и
![]() могут
могут
быть
определены по экспериментально снятой
диаграмме обратного вторичного
излучения цели. Однако подобный путь
связан с большими
практическими трудностями. Поэтому при
определении
![]() и
и
![]() в
большинстве случаев реальные цели
заменяют моделями,
статистические, характеристики которых
близки к соответствующим
характеристикам целей. Для уменьшения
многообразия
все цели при анализе и синтезе РЛС
разбивают на пять видов
(моделей).
в
большинстве случаев реальные цели
заменяют моделями,
статистические, характеристики которых
близки к соответствующим
характеристикам целей. Для уменьшения
многообразия
все цели при анализе и синтезе РЛС
разбивают на пять видов
(моделей).
Цели 1-го вида. К целям 1-го вида относятся цели без блестящей точки (без доминирующего отражателя) с медленными флюктуациями отраженных сигналов.
Под
медленными понимают такие флюктуации,
ширина спектра
![]() которых
удовлетворяет условию
которых
удовлетворяет условию
![]() (3.1)
(3.1)
где
![]() —
время однократного обзора зоны;
—
время однократного обзора зоны;
— частота повторения зондирующих импульсов.
Физическая модель — совокупность большого числа произвольно расположенных в ограниченном объеме равноценных независимых вторичных излучателей, относительная скорость перемещения которых обеспечивает выполнение условия (3.1).
Плотность
распределения вероятности эффективной
поверхности
![]() цели
1-го вида описывается экспоненциальным
законом
цели
1-го вида описывается экспоненциальным
законом
![]()
а плотность распределения вероятности амплитуды отраженного сигнала —простым законом Рэлея
![]()
(здесь![]() —дисперсия
мгновенных значений отраженного
сигнала).
Поэтому цель этого вида часто называют
рэлеевской.
—дисперсия
мгновенных значений отраженного
сигнала).
Поэтому цель этого вида часто называют
рэлеевской.
Сигнал, отраженный от цели 1-го вида, флюктуирует по амплитуде от нуля до максимального значения от обзора к обзору; в пределах времени облучения цели флюктуации практически отсутствуют (рис. 3.1а).
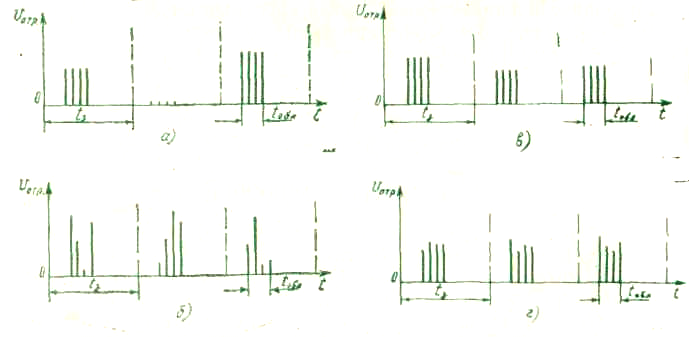
Рис. 3.1. Особенности сигналов, отраженных от целей: а—1-го вида; б—2-го вида; в — 3-го вида; г — 4-го вида
К целям 1-го вида относятся все реактивные самолеты при обнаружении их одночастотными РЛС сантиметрового диапазона.
Цели 2-го вида. Цели 2-го вида отличаются от целей 1-го вида лишь большей скоростью флюктуации отраженного сигнала. Ширина спектра флюктуации сигнала для таких целей соизмерима с частотой повторения зондирующих импульсов РЛС:
![]() (3.2)
(3.2)
Флюктуации, ширина спектра которых удовлетворяет условию (3.2), называются быстрыми. Сигнал, отраженный от цели 2-го вида, флюктуирует по амплитуде от нулевого до максимального значения от импульса к импульсу в пачке (рис. 3.16).
К
целям 2-го вида относятся легкие вертолеты
при обнаружении
их одночастотными РЛС, все типы вертолетов
и самолетов при обнаружении
их РЛС с перестройкой по частоте от
импульса к импульсу
на величину
![]() (здесь
(здесь![]() —скорость
света). В некоторых
случаях к целям 2-го вида относятся также
и гидрометеообразования.
—скорость
света). В некоторых
случаях к целям 2-го вида относятся также
и гидрометеообразования.
Цели 3-го вида. К целям 3-го вида относятся цели с блестящей точкой и медленными флюктуациями отраженных сигналов.
Физическая
модель — шар в облаке элементарных
вторичных излучателей,
суммарная эффективная поверхность
которых соизмерима
с эффективной поверхностью шара, а
скорость взаимного перемещения
элементарных излучателей обеспечивает
выполнение условия
(3.1).
Плотность вероятности эффективной
поверхности цели
3-го вида подчиняется закону
![]() -квадрат
с четырьмя степенями
свободы
-квадрат
с четырьмя степенями
свободы
![]()
Отраженный сигнал флюктуирует по амплитуде от минимального (не равного нулю) до максимального значения от обзора к обзору; в пределах времени облучения цели флюктуации практически отсутствуют (рис. 3.1в).
К целям 3-го вида относятся реактивные самолеты при обнаружении их РЛС метрового диапазона и РЛС с многочастотными зондирующими сигналами, лесистая и гористая местность.
Цели 4-го вида. Цели 4-го вида отличаются от целей 3-го вида большей скоростью флюктуации отраженного сигнала. Сигнал флюктуирует по амплитуде от минимального (не равного нулю) до максимального значения от импульса к импульсу пачки (рис. 3.1г). Ширина спектра флюктуации сигнала удовлетворяет условию (3.2).
К целям 4-го вида относятся турбовинтовые самолеты и тяжелые вертолеты при обнаружении их одночастотными РЛС.
Цели 5-го вида. К целям 5-го вида относятся нефлюктуирующие цели (шар).