

12.3.3. Инструментальная ошибка измерения угловых координат
Составляющими инструментальной ошибки измерения угловых координат являются:
ошибки за счёт неточного ориентирования, горизонтирования и юстирования антенны РЛС;
ошибки, возникающие при передаче углового положения антенны к измерителю;
ошибки съёма.
Ошибка за счет неточного ориентирования оказывает влияние только на точность измерения азимута. Она зависит от способа топопривязки точки стояния РЛС, точности используемых топогеодезических приборов (буссоли, теодолита), а также степени соответствия электрической и геометрической осей антенны, т. е. от точности изготовления антенной системы.
Существующие методы топопривязки обеспечивают точность ориентирования в пределах нескольких минут. Для уменьшения ошибки, связанной с рассогласованием электрической и геометрической осей антенны, которая по своему характеру является систематической, используются выносные гетеродины, по излучению которых уточняется направление электрической оси антенны. С учётом этого среднее квадратическое значение ошибки ориентирования составляет σβ ор = 5...10'.
Неточность
горизонтирования антенны приводит к
отклонению её электрической оси от
нормали к поверхности земли и точке
стояния РЛС, а следовательно, к наклону
ДН антенны и возникновению ошибки
из-за неточности горизонтирования. Как
видно из рис. 12.3, если ошибка горизонтирования
равна Δг, а
высота полёта цели над линией горизонта
— Hлг,
то это приведёт к линейной ошибке в
измерении местоположения цели в
азимутальной плоскости
и ошибке
измерения азимута
.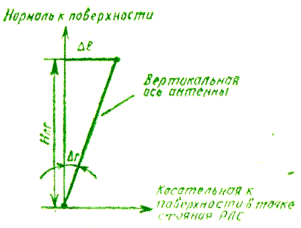
Среднее квадратическое значение этой ошибки σβг = σΔгsin ε и может составлять, особенно на больших углах места, значительную часть ошибки горизонтирования. При измерении угла места вклад этой ошибки ещё более значителен, поскольку σεг = σΔг.
Для снижения этой ошибки при развёртывании РЛС и при проведении регламентных работ горизонтирование антенных Рис. 12.3. К определению ошибки
систем осуществляется с помощью теодолитов, а для за счёт неточности горизонтирования
текущего контроля правильности горизонтирования антенны
используются индикаторы уровня.

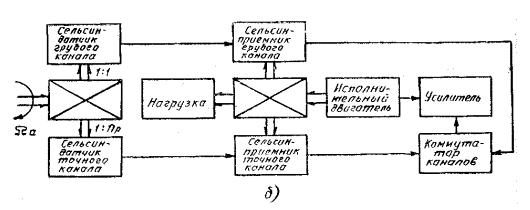
Рис. 12.4. Система передачи азимута; а — одноканальная; б —.двухканальная
Юстирование антенны производится после её горизонтирования и сводится к установке номинального положения оси антенного луча. Осуществляется с помощью топогеодезических приборов, юстировочных приспособлений и вышек, излучающих контрольные сигналы. При соблюдении требований соответствующих инструкций и методик по юстированию ошибка измерения угла, обусловленная неточностью юстирования, не превышает единиц минут.
Ошибка за счёт передачи углового положения антенны к измерителю имеет место в основном при измерении азимута. Она обусловлена ошибками электромеханических устройств, неточностью срабатывания электронных схем и люфтом в механических редукторах, входящих в систему передачи азимута (СПА). В РЛС используются одноканальные и двухканальные системы передачи азимута на сельсинах. Достоинством одноканальных СПА (рис. 12.4а) является отсутствие ложного нуля, однако точность их невысока и составляет около 1°. Поэтому они находят применение лишь в РЛС метрового диапазона, где другие составляющие ошибок имеют тот же порядок. В РЛС сантиметрового диапазона используются только двухканальные СПА (рис. 12.4б). Точность передачи азимута в таких системах примерно в nр раз выше, чем в одноканальных (nр — коэффициент редукции точного канала). Средняя квадратическая ошибка составляет σβ(2кан) = 7 ... 9'.
Коэффициент редукции обычно имеет значения nр — 20...40. В двухканальных СПА с чётным значением np возможно слежение с рассогласованием на 180° из-за совпадения истинного нуля точного канала с ложным нулем грубого. Для исключения этого предусматривают специальные схемы сбивки нуля. Кроме того, для уменьшения ошибки сельсины питаются от источников с повышенной частотой (единицы килогерц).
Ошибка, возникающая при съёме угловых координат, зависит от вида съёма.
При визуальном съёме она обусловлена неточностью формирования масштабных отметок азимута (МОА) или угла места, неточностью определения центра отметки, интерполяцией положения центра отметки относительно масштабных отметок.
Ошибки формирования МOA зависят от способа формирования. Масштабные отметки азимута на экране индикатора образуются путём подсвета развертки дальности па азимутах, кратных минимальной градации МОА ΔβМОА. В соответствии с этим МОА должны быть синхронизированы импульсом запуска РЛС и иметь длительность, равную длительности развёртки по дальности τМОА = Тр. Получение различных градаций МОА с целью удобства отсчёта азимута обеспечивается изменением амплитуды импульсов МОА.
Существуют
электромеханический и электрический
способы формирования МОА (рис. 12.5). При
электромеханическом способе (рис.
12.5а) в качестве датчика МОА используется
контактная группа, замыкающаяся с
помощью кулачков, механически связанных
с
антенной. Число кулачков т
и
коэффициент редукции л,, определяют
градацию МОЛ![]()
Рассмотрим кратко функционирование устройства. В исходном состоянии замкнуты контакты 2—3, и па схему совпадения пода

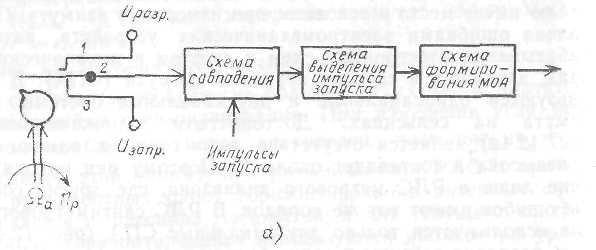
ется
запрещающий пошнцпад. Имшульсы запуска
при этом не проводят на выход схемы.
После набегания кулачка контакты 2—3
размыкаются, а контакты
/ --2 замыкаются,
и па схему совпадения
подастся разрешающий потенциал. Время
замыкания контактов
![]() составляет
десятки миллисекунд, поэтому через
схему совпадения
могут пройти несколько импульсов
запуска. Для формирования
МОА только ог первого импульса служит
схема выделе !:ия
импульса зацускл, представляющая собой
формирователь импульсов
(обычно блокгигг-геяератор! с временем
ноестаповлекия
составляет
десятки миллисекунд, поэтому через
схему совпадения
могут пройти несколько импульсов
запуска. Для формирования
МОА только ог первого импульса служит
схема выделе !:ия
импульса зацускл, представляющая собой
формирователь импульсов
(обычно блокгигг-геяератор! с временем
ноестаповлекия
![]() Это
исключает ее срабатывание ог остальных
импульсои запуска,
прошедших схему совпадения. Выделенный
импульс за пуска
поступает на схему формирования МОЛ,
вырабатывающую импульс
с
длительностью,
равной
Это
исключает ее срабатывание ог остальных
импульсои запуска,
прошедших схему совпадения. Выделенный
импульс за пуска
поступает на схему формирования МОЛ,
вырабатывающую импульс
с
длительностью,
равной![]()
Ошибки в устройстве возникают из-за несовпадения моментов замыкания контактом и прихода импульсов запуска, изменения момента замыкания контактов вследствие иеханнчеоких люфтов.
Поскольку
моменты за'МЫ'кання контактов и поступления
им-пульсов запуска
не синхронизированы, то интервал времени
между ними
![]() представляет
собой случайную величину с равновероятным
законом распределения в пределах
представляет
собой случайную величину с равновероятным
законом распределения в пределах![]() ].
При этом
].
При этом
![]() а
связанная с ней ошибка намерения
азимута
а
связанная с ней ошибка намерения
азимута
![]() при
скорости
вращения
при
скорости
вращения![]() и 7',, =
и 7',, =
= 5 мс эта ошибка равна ст^ = 3'. Вторая составляющая ошибки значительно больше и в основном определяет суммарную ошибку, которая может достигать значении 15... 20'. Поэтому этот способ формировании МОЛ используется в РЛС с малой точностью измерении азимута. Лучшая точность обеспечивается при электрическом способе формирования МОЛ. В качестве датчиков МОЛ а этом случае используются сельсины или джжи с. ^rar^)i(тa^^и. В устройстве формирования МОД на сельсинах (рис. 12.56) напряжение с выхода есл:>сш!-трапсфор1матора детектируется, усиливается, ограничивается и используется в качестве стробирующего напряжения. Импульсы запуска проходят через етробиругощий каскад только тогда, когда это напряжение близко к нулю. При этом также позможно прохождение нескольких импульсов запуска, и режим работы последующих элементов выбирается так, чтобы МОЛ формировалась только ог первого импульса запуска, т. с. так же, кик \\ в ранее рассмотренном случае.
Принцип работы магнитного датчика МОЛ (ряс. 12.6) основан на изменении сопротивления катушки индуктивности L переменному току*при- изменении сопротивления магнитопровода.
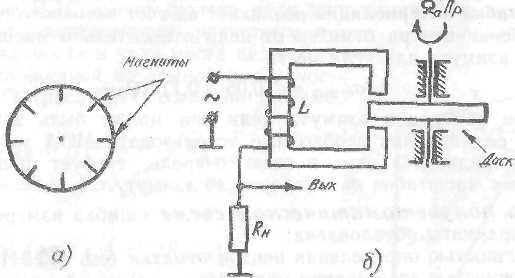
Рис. 12.6. Магнитный датчик масштабны* отметок азимута: ■ а- диск с магнитами; б — схема датчика
Диск с нанесенными >;а неги рисками из магнитного материала (рис. 12.6а) помещен it поле постоянного магнита и вращается синхронно с антенной. Когда какой-либо из магнитов диска попадает в область зазора, сопротивление магнитопровода, а следовательно, и катушки L уменьшается и на нагрузке появляется выходной импульс. Он далее детектируется и используется для фор-
259
мвровання МОЛ, которое осуществляется так же, кз'К и в схеме рис. 12.5а. Изменяя скорость вращения диска, путем выбора коэффициента редукции, и угловое расстояние между рисками, можно обеспечить любую градацию МО А. Средняя к аи драги теска я пшкбш при электрическом способе формирования МОЛ обусловлена в основном несовпадением моментов прихода импульсов запуска и сигналов с датчика МОД и составляет 3...4'.
Ошибка за счет неточности определения центра отметки существенно зависит от соотношения линейного размера отметки по углу и разрешающей способности человеческого глаза Агл- Если £)тм/Д.-л ~> U то средняя квадрэтическая ошибка определения центра отметки
![]() (12.21)
Если
(12.21)
Если![]() .
то
.
то
![]() (12.22)
(12.22)
где
![]() --масштаб
по углу;
--масштаб
по углу;
Л6 — величина сектора, наблюдаемого на индикаторе (для ИКО йр = 360°);
LPs —длина развертки индикатора по углу (для ИКО Lpe = 7iDlvr/\R).
оре-щнн кщадра гаческая ошшжа определения центра отметки составляет Овди = 10... 15'. Для се уменьшения необходимо использовать крупные масштабы индикаторов по углу.
Ошибка интерполяции возникает за счет неточного определения положения центра отметки от цели относительно масштабных отметок азимута или угла места
![]()
При намерении азимута цели она может быть значительной,
и для ее снижения необходимо попользовать МОА .мелких градаций (порядка 1°), иго, в свою очередь, требует использования крупных масштабов индикаторов по азимуту.
При полуавтоматическом съеме ошибка измерения утло-зой координаты обусловлена:
неточностью определения центра отметки (ом. (12.21), (12.22)); неточностью совмещения маркера; дискретностью представления угловой координаты.
Ошибки за счет неточного совмещения маркера с Центром отметки и дискретности представления в соответственно равны
![]()
где Авд — дискретность представления угловой координаты при съеме.
Опенка величины ошибки, возникающей при автоматическом съзме угловой координаты, произведена в § 16.6.
12.3.4. Динамическая ошибка измерения угловых координат
Линейное смещение цели за время съема составляет в азимутальной плоскости irp = Vitc — «n^sin q; в угломестной плоскости — \ге — vrtf. sin к cos q, где v/ — тангенциальная составляющая скорости цели. Угловые смещения соответственно равны Лр ^= = Дгр/г, As = \r,-/r.
При равновероятном (в пределах 0... 2л) ракурсе цели средние квадратичеекис значения динамических ошибок оц ,(1,ц =
--= иц1<./\'2 г; оедян ■== vjc sin е/]'2г.
Эффективным способам снижения этих ошибок является нс-цользсвание полуавтемати'чеокого или автоматического съема координат.
12.4. ОШИБКИ ОПРЕДЕЛЕНИЯ ВЫСОТЫ И СПОСОБЫ ИХ СНИЖЕНИЯ