

16,3.1. Общие понятия
Для обеспечения работы цифровых устройств обработки необходимо, как отмечалось выше, преобразовать аналоговый сигнал приемного тракта РЛС в цифровую форму. Эта процедура в большинстве случаев включает три самостоятельные операции: дискретизацию, квантование и кодирование.
Дискретизация аналогового сигнала и (/) состоит а намерении (отсчете) его значений в дискретные моменты времени, отстоящие друг от друга на интервал Тя, называемый периодом дискретизации. В результате сигнал и (t) преобразуется в последовательность своих значений {и (7П)} в моменты времени £п = пТ.ь п = = 0, 1, 2,...
Квантование — это преобразование аналоговых значений сигнала в дискретную форму МцВ (?«) путем дискретизации сигналов по амплитуде (или по фазе).
После квантования сигнал кодируется. Чаще всего операции квантования и кодирования совмещаются и выполняются в АЦП.
16.3.2. Устройство дискретизации аналоговых сигналов
Устройство дискретизации н простейшем случае представляет собой стробируемый каскад (ключ), открывающийся на время т^ с периодом Гд (рис. 16.3), удовлетворяющим условию
![]() (16.1)
316
(16.1)
316
где /max — максимальная (граничная) частота в спектре входного сигнала.
Период (частота) дискретизации является важнейшим параметром цифровых устройств обработки, существенно влияющим на их характеристики. Оценим качественно это влияние на примере цифровых фильтров.
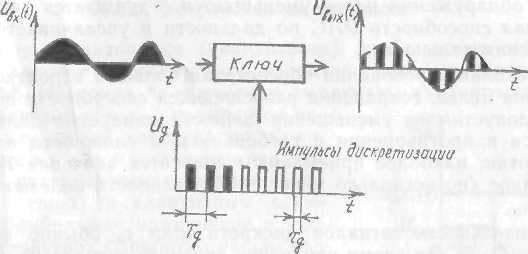
Рис. 16.3. Дискретизация аналогового сигнала
При практической реализации ^ЦФ в общем случае- будут и.м£хь место два вида п.огд£ШД<1СХ&й.- [50|: алгоритмическая погрешность в\ и вычислительная погрешность е2. Общая погрешность равна их с~умме: e=_ei_-f-e*. Алгоритмическая погрешность характеризует гтепрнь^откл'п'нрция выходных сигпалов_ ЦФ от выходных сигналов аналогового прототйца]Т~_со¥Ждаюи1ие моменты времени, ичевид-но, чем м.едьшс._п.сриод _длскретизаций~"7^,-"те№*"^о'™ее'"приблнжс-ние, т. .е^-М-ен1ДП£_длгор_итмичёская погрешность' R наоборот. Как показано в [53], С| и Гд связаны прямо пропорциой&льной зависимостью. Вместе с тем лри уменьшении Гд увеличивается количество выборок (отсчетов) входного сигнала, что приЪодйт"к"17в^Л1гчс-нию числа арифметических "операции (умножений и сложений) лри определении значений выходного сигнала. Поскольку при выполнении каждой операции результат из-за конечного числа разрядов либо округляется, либо усекается (отбрасываются все младшие разряды, стоящие после наименьшего сохраняемого разряда), то чем больше операций, тем больше вычислительная погрешность еа. Существует оптимальное значение периода дискретизации 7'доит, при котором суммарная погрешность минимальна, причем оно может превышать величину, определяемую выражением (16.1).
При обработке радиолокационных сигналов не ставится задача восстановления исходного процесса после дискретизации. Поэтому выбор Гд осуществляется с учетом того, что он влияет на вероятнас!^_о_бн_а41Яке:ш^~1Щда.Й.^^зр_ежающую_^н.о^обность РЛ'С до дальности, ошибку определения дальности и сложность систе-
317
мы обработки. Так, чем._М&ЫЬЩ& Тя, тем меньше вероятность пропуска цели (больше вероятность обнаружения), ногтем наибольшее числобучаеткое делится днавазон дальностей, измеряемых РЛС.
Т4 <с я^г-один я тот же сигнал попадает в два или более соседних к а на ля дальности, что вшивает эффект «дроб^ледия^.сигнал a L евя -заятдй с- появлением ложттиУцелей. Ксли же Т^^-ти, то~вёр~6ят-ность обнаружения целей уменьшается. Ухудшается также разрешающая способность РЛС по дальности и увеличивается ошибка измерения дальности.
Поскольку требования обеспечения большей вероятности обнаружения целей, сохранения разрешающей способности по дальности и допустимого уменьшения -точности измерения дальности находятся в противоречии с требованием к сложности аппаратуры обработки, наиболее приемлемым считается значение Тк, примерно равное (но несколько меныне) длительности полезного сигнала Тя ж ти.
Длительность сигналов дискретизации хЛ обычно выбирается так, чтобы за это время изменение входного сигнала не превышало допустимой величины Да, т. е. {duBXfdt)mf,s%a ^.Au.
Это условие выполняется при тл -С Т<л и его реализация, в случае использования простейшего дискретнзатора (рис. 16.3), связана с необходимостью существенного увеличения быстродействия АЦП и широкополосное™ устройств формирования импульсов дискретизации. Требования к быстродействию АЦП можно снизить, если между днехрегиэатором и АЦП включить устройство
Рис.
16 4. Схема слежения и запошша-
ЧГШ
(ГОДНЫХ СИГНАЛОВ
Гд-Тд.
Спектр днекретизироваиного сигнала является периодическим [37] г! представляет собой последовательность спектров входного сигнала, сдвинутых- один относительно другого на величину Fa. =
ЗШ
Если период дискретизации удовлетворяет условию (16.1), то спектры не перекрываются и могут быть разделены с помощью фильтров. Если же Т„ > l/2f,imx, то имеет место наложение спектров, что вызывает искажение сигналов. Для уменьшения этого гффекта перед дискретизатором устанавливается полосовой фильтр или фильтр низких частот с полосой пропускания Пф ~ h\.