

6.3. Повышение помехозащищенности за счёт увеличения плотности потока энергии зондирующего сигнала
Методы увеличения плотности потока энергии. Существенное место в решении проблемы помехозащищенности РЛС занимают методы, обеспечивающие энергетическое превышение сигнала над помехой, необходимое для нормального функционирования РЛС. К этим методам борьбы с помехами относятся увеличение энергии, излучаемой РЛС в зону обзора или в сектор зоны, маскируемый помехой, и сокращение размеров зоны с целью увеличения потока энергии, излучаемой в единицу телесного угла зоны.
Увеличение энергии. Энергия, излучаемая РЛС в зону обзора, при равномерном обзоре
![]()
Из этого соотношения видно, что увеличение Ээ можно обеспечить путём увеличения:
импульсной мощности зондирующего импульса;
длительности зондирующего импульса;
частоты повторения;
времени однократного обзора зоны.
Первый путь связан с увеличением габаритов и массы передатчика, необходимостью принятия мер по повышению электрической прочности антенно-волноводного тракта.
При увеличении длительности зондирующих импульсов необходимо переходить к широкополосным сигналам, так как в противном случае увеличение τи приводит к ухудшению разрешающей способности РЛС по дальности и, как следствие, к снижению помехозащищенности в условиях пассивных помех.
Увеличение частоты повторения зондирующих сигналов может привести к возникновению неоднозначности- измерения дальности до целей, а увеличение времени однократного обзора зоны tз неизбежно связано со снижением информационной способности РЛС.
Увеличение энергии, излучаемой РЛС в сектор зоны. Реализация этого метода силовой борьбы с помехами возможна только лишь при адаптивном обзоре, предусматривающем наличие обратной связи между обнаружителем сигналов и системой управления антенным лучом (рис. 6.7).
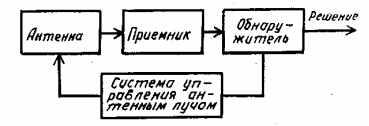
Рис. 6.7. Управление антенной при адаптивном обзоре
Сигналы в обнаружителе обрабатываются методом последовательного анализа до тех пор, пока время задержки антенного луча в заданном направлении не достигнет предельно допустимого значения. В этот момент на основе уже полученных данных в соответствии с установленным правилом принимается решение о наличии или отсутствии цели в просматриваемом направлении и антенный луч перемещается в смежную позицию. Среднее время задержки луча в направлениях, где находится цель, при адаптивном обзоре значительно больше среднего времени задержки луча в направлениях, где цели отсутствуют. Таким образом, производится автоматическое перераспределение времени, а следовательно, и энергии излучаемых сигналов между различными секторами зоны обзора.
При адаптивном обзоре выигрыш в величине среднего времени просмотра направлений, где находится цель, по сравнению с равномерным обзором уменьшается при увеличении числа элементов дальности, одновременно просматриваемых в каждом положении антенного луча. Однако даже при сравнительно большом количестве таких элементов (несколько сотен) выигрыш может быть весьма существенным (в 5... 10 раз).
Благодаря высокой эффективности адаптивные методы обзора весьма перспективны, особенно в РЛС с фазированными антенными решетками, в которых может быть обеспечено безынерционное сканирование антенного луча по сложной программе [29].
Уменьшение телесного угла зоны обзора. Этот путь увеличения плотности потока энергии зондирующих сигналов применим в тех случаях, когда допускается сокращение размеров зоны обзора, сопровождающееся потерей информации о некоторой части целей. Изменение в широких пределах размеров и формы зоны в процессе её обзора возможно только лишь при использовании электронных методов управления положением антенного луча.