

Глава 7. Принципы построения аппаратуры пеленгации постановщиков активных помех
7.1 Требования предъявляемые к аппаратуре пеленгации
Ни один из методов
защиты, рассмотренный в предыдущей
главе, не гарантирует отдельно взятую
РЛС от подавления её активными
помехами. Поэтому наряду с системами
активной локации необходимо использовать
системы пассивной локации, позволяющие
получать информацию о ПАП за счет
использования энергии помеховых
сигналов. На базе наземных РЛС наиболее
просто реализуется триангуляционный
метод определения координат ПАП [3].
Этот метод основан на измерении угловых
направлений (пеленгов) па ПАП минимум
в двух приемных пунктах, разнесенных
на некоторое расстояние rб,
называемое базой (рис. 7.1). 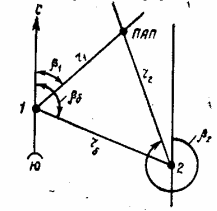
|
Рис. 7.1. К определению координат ПАП на плоскости триангуляционным методом.
|
Дальность до ПАП рассчитывается по измеренным азимутам β1 и β2 и известной базе rб по формуле
![]()
Где βб - азимут приемного пункта 2 с приемного пункта 1.
Средняя квадратическая ошибка измерения дальности до ПАП определяется соотношением
![]()
(7.1)
где r1 и r2 - дальность до ПАП соответственно из первой и второй точек приема;
σβ - средняя квадратическая ошибка измерения азимута ПАП, рад.
Расчеты по формуле (7.1) показывают, что для обеспечения приемлемых требований к точности измерения дальности до ПАП необходимо обеспечить высокую точность измерения пеленгов на ПАП из точек приёма.
Для измерения пеленгов па ПАП можно использовать РЛС с остронаправленными диаграммами направленности приемных антенн. В силу большой интенсивности помеховых сигналов в точке стояния РЛС практически всегда происходит их прием по боковым лепесткам диаграммы направленности антенны. При этом возникают ложные пеленги, которые могут значительно усложнить задачу определения местоположения ПАП триангуляционным методом. Поэтому одно из основных требований, предъявляемых к аппаратуре пеленгации ПАП, состоит в исключении ложных пеленгов, обусловленных приемом сигналов по боковым лепесткам диаграммы направленности антенны.
Другим, не менее важным требованием, как уже отмечалось, является обеспечение высокой точности измерения углового направления на ПАП.
7.2. Обобщенная структурная схема и варианты технической реализации аппаратуры пеленгации
При пеленгации ПАП полезный сигнал представляет собой шумоподобный сигнал неизвестной структуры. Алгоритм оптимального обнаружения такого сигнала имеет вид

(7.2)
где у(t) — входной шумоподобный сигнал;
Nп — спектральная плотность мощности мешающих шумов;
λ0 — порог обнаружения;
Т — время наблюдения.

Рис. 7.2. Структурная схема энергетического приёмника
Устройство, реализующее алгоритм (7.2), называют энергетическим приёмником (рис. 7.2). В таком приемнике вычисляется энергия входного сигнала, производится ее нормировка к спектральной плотности мешающих шумов и сравнение результата нормировки с порогом.
При решении задачи пеленгации ПАП мешающим шумом являются помеховые сигналы, принятые по боковым лепесткам диаграммы направленности приемной антенны РЛС. Поэтому в аппаратуре пеленгации должно быть, предусмотрено устройство, обеспечивающее опенку мощности помех, принятых по боковым лепесткам диаграммы направленности. В простейшем случае подобную задачу может решить оператор РЛС по виду засвета экрана ИКО. Однако при наличии в зоне действия РЛС нескольких ПАП возможности оператора по оценке мощности мешающих помех резко снижаются и выделение пеленгов, соответствующих основному лепестку диаграммы направленности антенны, становится затруднительным или вообще невозможным. С достаточно высокой степенью точности оценка мощности помех принятых по боковым лепесткам диаграммы направленности приемной антенны РЛС, может быть получена с помощью дополнительного канала приема с антенной, диаграмма направленности которой огибает боковые лепестки приемной антенны РЛС (см. рис. 6.22а). Нормировка выходных сигналов основного канала приёма при этом может производиться с помощью схемы ШАРУ или логарифмических приёмников и схемы вычитания.
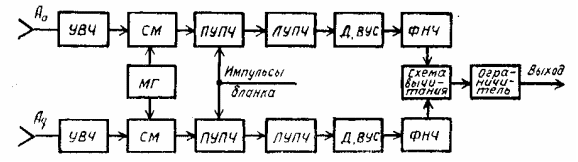
Рис. 7.3. Устройство пеленгации ПАП с логарифмическими приёмниками в
основном и дополнительном каналах приёма
На рис. 7.3 изображена схема аппаратуры пеленгации ПАП с логарифмическими приемниками в основном и дополнительном каналах приема. В качестве антенны А0 основного канала приёма используется остронаправленная приёмная антенна РЛС.
Сигнал на выходе ФНЧ основного канала приёма в фиксированный момент времени определяется соотношением
![]()
(7.3)
![]()
где - коэффициент усиления ВУС основного канала приёма;
Во
— постоянный коэффициент, зависящий
от уровня напряжения Uвхо
на входе ЛУПЧ, соответствующего переходу
от линейного участка характеристики к
логарифмическому;![]()
— коэффициент усиления приёмника до выхода предварительного УПЧ (ПУПЧ) основного канала;
Рп — мощность активной шумовой помехи па входе приемника РЛС при условии, что коэффициент усиления антенны А0 равен единице;
— коэффициент
усиления антенны на ПАП;![]()
![]()
— угловое отклонение ПАП от направления основного лепестка диаграммы направленности антенны А0.
По
аналогии с (7.3) выходное напряжение
узкополосного фильтра дополнительного
канала приёма![]()
(7.4)
При записи выражения (7.4) предполагалось, что ЛУПЧ в обоих каналах приёма идентичны.
Напряжение на
выходе схемы вычитания с учетом (7.3),
(7.4)
Для того чтобы ΔU
было монотонно связано с отношением
мощностей сигналов на входах основного
и дополнительного каналов приема,
необходимо обеспечить равенство![]()
(7.5)
Это можно сделать с помощью регулировки коэффициента усиления одного из ВУС (или обоих). При выполнении условия (7.5)
![]()
(7.6)
Из последнего соотношения видно, что в случае одного ПЛП выходное напряжение схемы вычитания практически не зависит от мощности помехи и определяется лишь отношением текущих коэффициентов усиления линейных частей приемных каналов и их антенн.
В направлении главного лепестка необходимо обеспечить , а в направлении боковых лепестков
. Это позволит достаточно просто с помощью усилителя-ограничителя подавить помеховые сигналы, принятые с направления боковых лепестков диаграммы направленности антенны А0. Для выполнения условия нужно, чтобы при нахождении ПАП вне основного лепестка диаграммы направленности выполнялось условие
![]()
(7.7)
![]()
— коэффициент усиления антенны А0 в направлении баковых лепестков.
Оценим возможность выполнения условия (7.7) за счет соответствующего выбора коэффициента усиления антенны дополнительного канала приема. Уровень боковых лепестков в РЛС сантиметрового диапазона составляет — 20 ... — 23 дБ [5]. При коэффициенте усиления в максимуме основного лепестка, равном , такому уровню боковых лепестков соответствуют коэффициенты усилении антенны в направлении боковых лепестков: Gоб = 50... 100.
Задача создания всенаправленных или слабонаправленных антенн с таким коэффициентом усиления представляет собой достаточно сложную техническую задачу. Её решение связано с необходимостью увеличения габаритов антенны дополнительного канала приёма или существенного увеличения количества дополнительных антенн. Поэтому этот путь обеспечения условия (7.7) не всегда пригоден. Проще выполнить условие (7.7) за счёт соответствующего выбора значения отношения КПУПЧ0/КПУПЧд путём увеличения коэффициента усиления ПУПЧ дополнительного канала приема. Однако и в этом случае обычно приходится использовать несколько дополнительных антенн. Так как уровень боковых лепестков в значительной степени зависит от особенностей площадки, на которой развернута РЛС, то регулировка КПУПЧд должна быть оперативной.
Увеличение значения произведения
![]()
(7.8)
с одной стороны, повышает точность измерения пеленга, так как ошибка измерения пеленга пропорциональна ширине диаграммы направленности Δβо на уровне, при котором выполняется условие
![]()
(7.9)
с другой стороны, приводит к снижению информационной способности аппаратуры пеленгации [20]. Последнее объясняется тем, что с увеличением произведения (7.8) увеличивается порог принятия решения, и это может привести при наличии нескольких ПАП в зоне действия РЛС к не обнаружению сигналов ПАП, находящихся в главном лепестке диаграммы направленности, т. е. к потере пеленга на ПАП. С целью обеспечения достаточно высокой информационной способности значение произведения (7.8) следует выбирать на несколько децибел больше уровня первых боковых лепестков. Ширина диаграммы направленности антенны А0 на этом уровне примерно в два раза больше ширины па уровне половинной мощности.
Полоса пропускания узкополосного фильтра для обеспечения максимизации качества обнаружения сигналов пеленгуемого ПАП должна выбираться из условия
![]()
Где tнаб — время нахождения ПАП в главном лепестке диаграммы направленности приемной антенны РЛС на уровне, при котором выполняется условие (7.9).
Например, при скорости вращения антенны 6 об/мин и ширине диаграммы направленности на уровне половинной мощности, равной , полоса пропускания узкополосного фильтра должна составлять
Пуф = 18 Гц. При некотором снижении качества обнаружения сигналов пеленгуемого ПАП для упрощения технической реализации узкополосных фильтров, схемы вычитания, усилителя-ограничителя полосу пропускания узкополосных фильтров можно выбирать из условия
![]()
Где Тп —период повторения зондирующих импульсов РЛС;
τбл — длительность бланкирующих импульсов.
Бланкирующие импульсы обеспечивают исключение влияния мощных отражений от местных предметов, метеообразований, дипольных отражателей на качество пеленгации ПАП. Их длительность примерно равна 0,5Тп .
На рис. 7.4 представлена упрощенная структурная схема аппаратуры пеленгации ПАП, в которой для нормировки выходного сигнала основного канала приема используется схема ШАРУ.
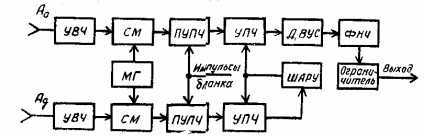
Рис. 7.4. Устройство пеленгации ПАП с ШАРУ
Мощность помеховых сигналов на выходе дополнительного канала приёма с учетом действия схемы ШАРУ.
![]()
(7.10)
где Кд — коэффициент усиления регулируемого усилителя дополнительного канала приема;
![]()
— мощность помехи на входе регулируемого усилителя дополнительного канала приёма;
С — постоянный коэффициент.
Из соотношения (7.10) следует, что
![]()
В качестве регулирующего напряжения в основном канале приёма используется то же напряжение, что и в дополнительном канале приёма. Поэтому при идентичных регулируемых усилителях в обоих каналах

(7.11)
![]()
где - мощность помехи на входе регулируемого усилителя основного канала приёма.
Из сопоставления соотношений (7.11) и (7.6) видно, что их правые части монотонно связаны между собой. Таким образом, все, что было сказано при анализе соотношения (7.6), справедливо и для рассматриваемого варианта построения аппаратуры пеленгации ПАП.
Мощность выходного сигнала в данном случае оценивается путём усреднения огибающей выходного сигнала основного канала приема с помощью узкополосного фильтра. Параметры этого фильтра аналогичны параметрам узкополосных фильтров в схеме, приведенной на рис. 7.3.
Для обеспечения высокой эффективности работы аппаратуры пеленгации ПАП при любом из рассмотренных вариантов ее построения динамический диапазон усилителей в приёмных каналах должен быть не менее 60 ... 80 дБ.
Если в РЛС имеется несколько дополнительных каналов приема с антеннами, диаграммы направленности которых перекрывают различные области боковых лепестков анаграммы направленности антенны основного капала приема, то решение о пеленге принимается в случае, когда имеет место превышение выходного напряжения основного капала над выходными напряжениями каждого из дополнительных каналов. Это обеспечивает более высокую пропускную способность аппаратуры пеленгации.