

5.4. Способы обеспечения заданного значения 1-й слепой скорости
Общие соображения. Неоднозначность измерения частоты при использовании когерентной пачки в качестве зондирующего сигнала приводит к появлению так называемых слепых скоростей, определяемых соотношением
![]() (5,2)
(5,2)
где
![]() —
номер слепой скорости.
—
номер слепой скорости.
Цель, летящая со скоростью, удовлетворяющей условию (5.2), воспринимается как пассивная помеха, если в РЛС не предусматриваются специальные меры по борьбе со слепыми скоростями.
Сущность способов борьбы со слепыми скоростями не зависит от вида системы СДЦ и в общем случае сводится к изменению структуры зондирующего сигнала так, чтобы значение 1-й слепой скорости превышало максимально возможную скорость цели
![]()
В настоящее время наиболее широкое распространение нашли следующие способы обеспечения требуемого значения 1-й слепой скорости:
изменение частоты повторения зондирующих импульсов (вобуляция частоты повторения) в процессе облучения цели;
применение многочастотных зондирующих сигналов;
увеличение частоты повторения зондирующих импульсов.
Рассмотрим сущность перечисленных способов.
Изменение частоты повторения зондирующих импульсов (вобуляция частоты повторения).
Если
две независимые РЛС работают на одной
и той же несущей
частоте, но имеют разные частоты
повторения, то, как это следует
из (5.2), значение 1-й слепой скорости будет
для них различным
и маловероятно, что движущаяся цель не
будет обнаружена
хотя бы одной из них. Очевидно, такого
же результата можно
добиться, если вместо двух РЛС использовать
одну, у которой период
повторения зондирующих импульсов через
определенные промежутки
времени, не превышающие время облучения
цели, изменяется,
принимая последовательно два или более
отличающихся
друг от друга значения. В простейшем
случае это может осуществляться
от одного цикла зондирования к другому,
когда период
повторения импульсов запуска попеременно
принимает два значения
![]() и
и
![]() Такой
вид запуска называют несимметричным
в отличие от симметричного, при котором
значение периода повторения
Такой
вид запуска называют несимметричным
в отличие от симметричного, при котором
значение периода повторения
![]() не
изменяется.
не
изменяется.
Несимметричную последовательность импульсов запуска можно сформировать, например, с помощью устройства, структурная схема которого и эпюры, поясняющие принцип его работы, приведены соответственно на рис. 5.2а, 5.2б.
В
РЛС с несимметричным запуском слепая
скорость возникает в
тех случаях, когда доплеровская поправка
частоты
![]() отраженного
от цели сигнала одновременно будет
удовлетворять двум условиям:
отраженного
от цели сигнала одновременно будет
удовлетворять двум условиям:
![]()
![]()
![]()
где
![]()


Решение
системы уравнений (5.3) относительно![]() имеет
вид
имеет
вид
![]()
После
умножения обеих частей на
![]() получим
получим
![]() (5.4)
(5.4)
где
![]() и
и
![]() —1-е
слепые скорости при несимметрич-
—1-е
слепые скорости при несимметрич-
ном и симметричном запусках соответственно.
Значения
![]() и
и
![]() ,
как следует из (5.3), должны удовлетворять
условию
,
как следует из (5.3), должны удовлетворять
условию
![]() (5.5)
(5.5)
Таким
образом, отношение![]() есть
не что иное, как отношение периодов
есть
не что иное, как отношение периодов
![]() и
и
![]() ,
выраженное в виде отношения целых
чисел, не имеющих
общего множителя. Возможность
существования нескольких
пар значений
,
выраженное в виде отношения целых
чисел, не имеющих
общего множителя. Возможность
существования нескольких
пар значений
![]() и
и
![]() ,
удовлетворяющих условию (5.5) при
фиксированном
значении их суммы
,
удовлетворяющих условию (5.5) при
фиксированном
значении их суммы
![]() +
+![]() ,
определяет неоднозначность
решения исходной системы уравнений.
,
определяет неоднозначность
решения исходной системы уравнений.
Решая
(5.3) относительно параметра
несимметричного запуска
![]() ,
получаем
,
получаем
![]() (5.6)
(5.6)
Значение
суммы
![]() в
этом соотношении должно удовлетворять
условию
(5.4), а значение разности
в
этом соотношении должно удовлетворять
условию
(5.4), а значение разности
![]() выбираться
с учетом,
выбираться
с учетом,
с одной стороны, допустимого снижения интервала однозначно измеряемых дальностей, с другой стороны,—обеспечения заданного уровня провалов в амплитудно-скоростной характеристике (АСХ) системы СДЦ.
Следует отметить, что при вобуляции частоты повторения:
в системах СДЦ с неадаптивными режекторными фильтрами при всех прочих равных условиях уменьшается коэффициент подавления (для примера на рис. 5.3 представлено семейство зави-
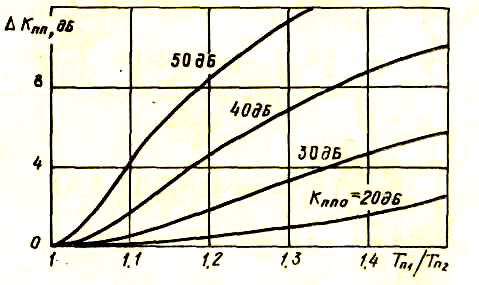
Рис. 5.3. Влияние несимметричного запуска на эффективность подавления ПП
симостей
проигрыша в коэффициенте подавления
от отношения
![]() из рисунка видно,
что проигрыш возрастает с увеличением
исходного
из рисунка видно,
что проигрыш возрастает с увеличением
исходного
![]() и
может быть весьма существенным);
и
может быть весьма существенным);
усложняется задача обеспечения требований к стабильности параметров зондирующих импульсов, так как при переходе от одинаковых к неодинаковым интервалам между импульсами следует учитывать целый ряд дополнительных факторов;
амплитудно-скоростная характеристика системы СДЦ является изрезанной.
На рис. 5.4а представлена зависимость
![]() (5.7)
(5.7)
при несимметричном запуске и указана глубина первых провалов, которая с достаточной точностью может быть оценена по формуле
![]() ,
,
где
![]() —
номер провала.
—
номер провала.
Степень изрезанности АСХ может быть уменьшена за счет увеличения числа изменяемых периодов повторения и рационального выбора соотношений между ними (рис. 5.4б). Наименьшая глубина провалов достигается в случае, когда числа, определяющие соотношение между периодами повторения [12], выбираются из условия:
![]()
где
![]()
![]() —
значение 1-й
слепой скорости при вобуляции частоты
повторения.
—
значение 1-й
слепой скорости при вобуляции частоты
повторения.

Рис. 5.4. Форма амплитудно-скоростной характеристики: а — при несимметричном запуске и отношении периодов, равном 63:65; б — при использовании четырех изменяемых периодов повторения
Применение многочастотных зондирующих сигналов. Возможности данного способа обеспечения 1-й слепой скорости рассмотрим на примере двухчастотного сигнала.
При использовании такого сигнала 1-я слепая скорость возникает при одновременном выполнении двух условий:
![]() (5.8)
(5.8)
где
![]() и
и
![]() —доплеровские
поправки частоты отраженных
—доплеровские
поправки частоты отраженных
сигналов
для частот
![]() и
и
![]() соответственно;
соответственно;
![]() и
и
![]() —
целые числа, не имеющие общего множителя.
—
целые числа, не имеющие общего множителя.
Систему уравнений (5.8) можно представить в виде
![]() (5.9)
(5.9)
где
![]() —
средняя частота;
—
средняя частота;
![]() -
доплеровская поправка, соответствующая
средней частоте;
-
доплеровская поправка, соответствующая
средней частоте;
![]() — разность
несущих частот зондирующего сигнала.
— разность
несущих частот зондирующего сигнала.
Сопоставляя
между собой системы уравнений (5.9) и
(5.3), можно сделать
вывод об эквивалентности обоих способов
обеспечения заданного значения 1-й
слепой скорости, если выполняется
условие![]()
Поэтому по аналогии с соотношениями (5.4) ... (5.6) можно записать
![]() (5.10)
(5.10)
![]() (5.11)
(5.11)
![]() (5.12)
(5.12)
где
![]() —1-я
слепая скорость при использовании двух-
—1-я
слепая скорость при использовании двух-
частотного сигнала.
С
учетом (5.10) и (5.12) выражение для![]() можно
пред-
можно
пред-
ставить
в виде
![]() При
При![]()
![]()

![]()
Рис.
5.5. Кривые обнаружения:
1—одночастотного
сигнала; 2—
двухчастотного
сигнала![]() можно обеспечить
требуемое значение 1-й
слепой скорости. Помимо
исключения слепых скоростей (или
уменьшения их количества) двухчастотный
сигнал обеспечивает:
можно обеспечить
требуемое значение 1-й
слепой скорости. Помимо
исключения слепых скоростей (или
уменьшения их количества) двухчастотный
сигнал обеспечивает:
снижение флюктуационных потерь при обнаружении целей 1-го вида (в качестве примера на
рис. 5.5 представлены кривые обнаружения одночастотного и
двухчастотного сигналов);
повышение помехозащищенности РЛС от активных помех.
На
рис. 5.6 представлены упрощенные структурные
схемы вариантов
построения приемного тракта РЛС с
двухчастотным зондирующим
сигналом. Первый вариант (рис.5.6а)
применяется в тех
случаях, когда двухчастотный зондирующий
сигнал, помимо всего
прочего, используют для исключения
необходимости введения
в систему СДЦ специальных схем компенсации
скорости ветра.
Амплитудно-скоростная характеристика
системы СДЦ при этом варианте
такая же, как и при симметричном запуске
с эквивалентной частотой Доплера,
равной
![]()

Рис. 5.6. Структура приемного тракта двухчастотной РЛС: а —при безнастроечной компенсации скорости ветра; б — при автоматической или ручной компенсации скорости ветра в каждом канале
Второй вариант (рис. 5.6 б) применяется, когда в системе СДЦ предусмотрены меры, обеспечивающие эффективную компенсацию скорости ветра (например, системы СДЦ на базе автокомпенсаторов). АСХ системы СДЦ при этом варианте примерно такая же, как и при несимметричном запуске с глубиной первых провалов, приблизительно равной (при однократном вычитании)
![]()
С точки зрения эффективности работы РЛС в условиях ПП при скомпенсированной скорости ветра второй вариант построения тракта лучше.
Увеличение частоты повторения зондирующих импульсов. Если источником ПП являются неподвижные местные предметы или по-
верхность земли, тo заданное значение 1-й слепой скорости может быть обеспечено путем выбора частоты повторения зондирующих импульсов из условия
![]() (5.13)
(5.13)
Значение
частоты повторения, удовлетворяющее
условию (5.13), как
правило, не обеспечивает однозначности
измерения дальности.
Поэтому нужно принимать соответствующие
меры по исключению
неоднозначности измерения дальности.
Одним из возможных способов устранения
неоднозначности является использование
в РЛС нескольких (минимум двух) частот
повторения. Сущность
этого способа рассмотрим на примере
использования двух частот
повторения
![]() и
и
![]()
Значение
одной из частот повторения, например
![]() выбирается
из условия (5.13), значение второй частоты
повторения
выбирается
из условия (5.13), значение второй частоты
повторения
![]() —
из
условия обеспечения однозначности
измерения дальности при работе
РЛС с частотой повторения, равной
разности частот
—
из
условия обеспечения однозначности
измерения дальности при работе
РЛС с частотой повторения, равной
разности частот
![]() и
и
![]()
![]() (5.14)
(5.14)
При
работе РЛС с частотой повторения
![]() истинное
время
запаздывания отраженного сигнала
истинное
время
запаздывания отраженного сигнала
![]() где
где
![]() —
время запаздывания отраженного сигнала
относительно
момента излучения ближайшего зондирующего
импульса.
—
время запаздывания отраженного сигнала
относительно
момента излучения ближайшего зондирующего
импульса.
Если
же РЛС работает с частотой повторения
![]() то
то
![]() =
0, 1,2...
=
0, 1,2...
Значения
![]() и
и
![]() можно
определить одним из известных методов,
например, с помощью ЭЛТ, развертка
которой запускается в
момент излучения каждого зондирующего
импульса.
можно
определить одним из известных методов,
например, с помощью ЭЛТ, развертка
которой запускается в
момент излучения каждого зондирующего
импульса.
Вполне очевидно, что должно выполняться равенство
![]() (5.15)
(5.15)
Поэтому,
подбирая значения
![]() и
и
![]() при
которых это
равенство
будет
справедливо, можно определить истинное
время запаздывания
отраженного сигнала.
при
которых это
равенство
будет
справедливо, можно определить истинное
время запаздывания
отраженного сигнала.
Эпюры, приведенные на рис. 5.7, наглядно иллюстрируют сущность рассмотренного способа устранения неоднозначности при измерении дальности.
В тех случаях, когда основным источником ПП для РЛС являются гидрометеоры или облака ДО, частота повторения зондирующих импульсов не должна превышать величины, обратной временной протяженности источника ПП:
![]() (5.16)
(5.16)
Если
условие (5.16) не выполняется, то сигналы,
отраженные от
источников ПП, находящихся в различных
импульсных объемах,
разделенных интервалом времени
![]() не
разрешают-
не
разрешают-

Рис. 5.7. Иллюстрация принципа устранения неоднозначности измерения дальности при использовании двух частот повторения
ся по дальности и воспринимаются как сигналы, отраженные от источников ПП, находящихся в одном и том же объеме. Из-за наличия весьма значительного градиента скорости ветра по дальности и высоте подобное обстоятельство может привести к существенному расширению спектра флюктуации суммарного сигнала ПП и, следовательно, к снижению эффективности подавления ПП системой СДЦ. Поэтому в рассмотренном случае значение одной частоты повторения обычно выбирают из условия (5.16), а второй — из условия (5.14).