

6.8. Принципы построения анализаторов помеховои обстановки в адаптивных рлс
Современное состояние и перспективы развития средств электронного подавления характеризуются все возрастающим многообразием помех и изменением их параметров в широких пределах. В этих условиях наиболее рациональным принципом построения и использования средств помехозащиты является адаптивный. Применение этого принципа предусматривает изменение параметров или способа функционирования РЛС, в том числе включение того или иного блока защиты, в соответствии с видом и параметрами действующей помехи.
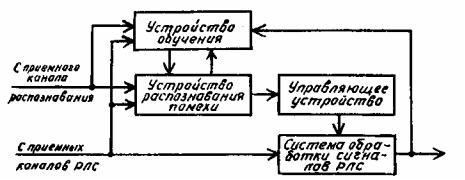
Рис. 6.23. Вариант самонастраивающейся системы защиты от активных помех
Принцип адаптации реализуется с помощью самонастраивающихся систем (рис. 6.23). Алгоритм их работы должен предусматривать оценку действующих на РЛС помех и изменять по результатам этой оценки состояние РЛС для достижения заданного показателя эффективности.
Оценку действующих на РЛС помех производит устройство распознавания. На его вход могут поступать сигналы, как с приемных каналов РЛС, так и со специального канала распознавания. Сопоставляя характеристики принятых сигналов с признаками помех, хранящимися в памяти, устройство распознавания выдаёт информацию о классе помех, воздействующих на систему обработки сигналов РЛС. При разработке словаря признаков учитываются следующие основные требования:
признаки должны быть информативными, т. е. обладать достаточными разделительными свойствами;
измерение признаков и классификация по ним должны осуществляться наиболее простыми средствами за минимально возможное время с необходимой достоверностью.
Поиск конкретных признаков проводится на основе анализа помех как объектов распознавания, выявления их внешних и внутренних закономерностей, проявляемых в структуре помех, способах их создания и воздействия на РЛС. Возможно, в частности, использование следующих признаков:
параметров помех (частотных, временных, пространственных, амплитудных и т. д.);
линейных и нелинейных функций от параметров помех;
изменение параметров по времени, частоте и в пространстве;
взаимосвязей между параметрами помех.
В качестве примера в табл. 6.2 приведены признаки некоторых видов помех, которые, могут быть использованы для распознавания.
Таблица 6.2
|
Вид помехи |
Признаки |
|
Непрерывная шумовая
Прерывистая шумовая
Пассивная
Импульсная
Ложные цели |
Протяженность по дальности, статистические характеристики, отсутствие междупериодной корреляции Изменение сигнала ШАРУ в соответствии с характером прерывания помехи Скорость перемещения, протяженность по дальности, нестационарность по дальности, наличие междупериодной корреляции Длительность, частота повторения, направление прихода Статистические характеристики сигнала, параметры траектории |
В качестве критерия выбора оптимальной решающей функции при принятии решения о принадлежности данной помехи к тому или иному классу можно использовать критерий минимального среднего риска. Для распознавания N классов помех [32] выражение для среднего риска имеет вид
Где Cik - потери при принятии решения о наличии помехи класса Sk, тогда как в действительности воздействует помеха Si;
- область
значений вектора признаков,
в которой принимается решение о наличии
помехи класса Sk;![]()
![]()
-
функция правдоподобия;
Рi
– вероятность воздействия помехи класса
Si;![]()
![]()
Выбором соответствующих областей минимизируется и из этого условия находится оптимальная решающая функция.
Качество распознавания оценивается вероятностями правильного и ложного распознавания. Вероятность правильного распознавания помехи i-го класса определяется как
Вероятность ложного распознавания Рлр, помехи класса Sk при действии любой помехи класса Si можно представить в виде

На основе информации, получаемой от устройства распознавания помехи, устройство управления включает соответствующую аппаратуру защиты, изменяет структуру зондирующего сигнала и алгоритм работы системы обработки.
При отсутствии априорных сведений о характеристиках помех устройство распознавания снабжается устройством обучения. На это устройство поступают сигналы с приемных каналов РЛС и канала распознавания, а также информация с системы обработки РЛС об эффективности использования того или иного средства защиты.
Реализация принципа адаптации ведет к усложнению РЛС, а значит к снижению ее надежности и возникновению дополнительных каналов проникновения помех (помехи каналу распознавания). Тем не менее применение этого принципа может оказаться необходимым, когда неизвестны вид помехи и характер изменения ее параметров, а возможные средства защиты взаимно исключают друг друга. В каждом конкретном случае нужно учитывать не только возможноё повышение эффективности, но и экономические затраты.