

-
Потери рассогласования,обусловленные неоптимальностью формы ачх линейной части приёмника
Числовое значение коэффициента потерь Lрф2 в общем случае определяется соотношением
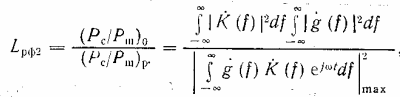
(9.6)
![]()
где — отношение сигнал — шум на выходе фильтра с оптимальной и реальной АЧХ соответственно.
Если отраженный сигнал представляет собой прямоугольный импульс, решение о наличии цели принимается на индикаторе с амплитудной отметкой или автоматически, а фильтр приёмника имеет прямоугольную АЧХ (полосовой фильтр), то из (9.6) следует
![]()
(9.7)
![]()
где — интегральный синус.
Зависимость (9.7) графически представлена на рис. 9.8 (кривая 2). Минимальное значение коэффициента потерь (порядка 0,8 дБ) достигается при Пф = 1,37/τи. Если решение о наличии цели принимается на индикаторе с яркостной отметкой (рис. 9.8, кривая 3), то минимальные потери составляют 2,3 дБ при Пф = 1,2/τи. Увеличение потерь на 1,5 дБ обусловлено тем, что оператор реагирует не на пиковую, а на среднюю яркость отметки.
В случае фильтра с колокольной АЧХ при принятии решения о наличии цели на индикаторе с амплитудной отметкой
![]()
(9.8)
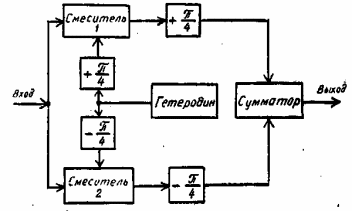
Рис. 9.7 Балансный смеситель с подавлением зеркального канала
Из графика (см. рис. 9.8, кривая 1) зависимости (9.8) видно, что минимум потерь (порядка 0,5 дБ) достигается при Пф = 0,8/τи.
Из рисунка 9.8 следует также, что при отклонении полосы пропускания линейной части приёмника от оптимального значения на 30 ... 40 % коэффициент потерь Lрф2 увеличивается не более чем на 0,5 дБ.
АЧХ, близкую к прямоугольной, имеют многокаскадные УПЧ на тройках взаимно расстроенных одноконтурных каскадов, а АЧХ, близкую к колокольной,— многокаскадные одноконтурные УПЧ. Использование в РЛС УПЧ с прямоугольной АЧХ позволяет повысить избирательность приёмника, однако при этом увеличивается подверженность приёмного тракта воздействию импульсных помех и возникает опасность маскировки сигналов слабой цели сигналами соседних сильных целей.
При воздействии импульсного сигнала на выходе УПЧ с прямоугольной формой АЧХ наряду с основным откликом появляются боковые лепестки достаточно большого уровня. Поэтому следует либо избегать применения УПЧ с прямоугольной формой АЧХ, либо принимать меры по снижению уровня боковых лепестков (например, путем включения на выходе УПЧ каскада с АЧХ, близкой к колокольной).
Меры,
обеспечивающие снижение Lрф2,
зависят от ширины полосы пропускания
линейной части приёмника. Если полоса
пропускания последней меньше
оптимальной, то возникающие при этом
потери уменьшить нельзя. В случаях,
когда полоса пропускания линейной части
приёмника выбрана больше оптимальной,
потери Lрф2
можно частично скомпенсировать путем
выбора полосы пропускания ВУС из условия
![]()
Где Пф опт — полоса пропускания линейной части приёмника (определяемая, как правило, полосой пропускания УПЧ), при которой при заданной форме АЧХ обеспечивается минимальное значение коэффициента потерь Lрф2.
При таком выборе полосы пропускания ВУС элементарные импульсы длительностью τэл = 1/Пупч, образующие в совокупности выходной сигнальный импульс УПЧ, интегрируются некогерентно видеофильтром и полученные группы проинтегрированных импульсов затем накапливаются за несколько периодов повторения в накопителе. Таким образом, потери, обусловленные расширением Пупч, частично компенсируются за счет интегрирования в υ = τи/τэл раз большего числа импульсов. Числовое значение Lрф2 при этом определяется по формуле
![]()
Где Lрф2(ПУПЧ опт) —значение коэффициента потерь Lрф2 при условии, что полоса пропускания УПЧ при заданной форме АЧХ равна оптимальной (определяется по соответствующему графику (рис. 9.8));
ΔLрф2 — не скомпенсированный остаток потерь, обусловленных расширением полосы пропускания УПЧ.

Рис. 9.8. Зависимость потерь рассогласования от произведения полосы пропускания фильтра на длительность импульса: 1— фильтр с колокольной ЛЧХ; 2 — полосовой фильтр (решение о наличии цели принимается по максимуму выходного сигнала приемника); 3 — полосовой фильтр (решение о наличии цели принимается по яркости отметки)
Этот остаток потерь является функцией коэффициента υ = Пупчτи и числа импульсов в пачке М. Определяется по графикам (рис. 9.9).
В качестве примера рассмотрим случай использования УПЧ с прямоугольной формой АЧХ и с шириной полосы пропускания 3 МГц для фильтрации прямоугольного импульса длительностью 1 мкс. Число импульсов в пачке будем считать равным 10. Из рис. 9.8 следует, что при отсутствии видеофильтра коэффициент потерь Lрф2 будет равен 3,5 дБ. Если после амплитудного детектора включен ВУС с полосой пропускания Пвус = 0,7 МГц, то
Lрф2 = 0,8дБ + 1,2дБ = 2дБ
Таким образом, потери обусловленные расширением полосы пропускания УПЧ, уменьшились на 1,5дБ.

Рис. 9.9 Зависимость потерь от коэффициента υ
Примечание. Невозможность полной компенсации потерь, обусловленных расширением полосы пропускания УПЧ. объясняется особенностью преобразования энергетического спектра шума детектором огибающей. Эта особенность иллюстрируется рис. 9.10а,б, (АЧХ УПЧ предполагается прямоугольной).

Рис. 9.10. Иллюстрация невозможности полной компенсации потерь за счёт расширения полосы пропускания УПЧ: а — энергетический спектр шума на выходе УПЧ с прямоугольной АЧХ; б — примерный вид энергетического спектра шума на выходе линейного детектора
Как видно из рис. 9.10.б, при увеличении Пупч суммарная интенсивность спектральных составляющих шума, попадающих в полосу пропускания ВУС, согласованную со спектром полезного сигнала па видеочастоте, увеличивается. Поэтому не следует допускать излишнего расширения полосы пропускания УПЧ.