

9.4.3. Потери рассогласования, обусловленные расстройкой приёмника по частоте
В процессе работы РЛС частоты передатчика и гетеродина неизбежно изменяются под воздействием различных дестабилизирующих факторов. Основными из этих факторов являются:
влияние колебаний температуры, влажности, давления и механических воздействий на параметры резонансных элементов передатчика и гетеродина;
нестабильность источников питания передатчика и гетеродина;
изменение нагрузки передатчика за счет непостоянства связи с антенной при ее сканировании.
В результате относительного изменения частот передатчика и гетеродина разностная частота будет отличаться от номинального значения промежуточной частоты и спектр отражённого сигнала частично или полностью уйдёт за пределы полосы пропускания УПЧ. На рис. 9.11 представлены гра- фики, иллюстрирующие зависимость потерь Lрф4 от степени относительной расстройки частот передатчика и гетеродина.

Рис. 9.11. Зависимость потерь рассогласования от относительной расстройки фильтра по частоте: 1— полосовой фильтр; 2— фильтр с колокольной АЧХ
Видно, что при неблагоприятных условиях расстройка приёмного тракта по частоте может привести к существенному снижению дальности действия РЛС. Обеспечить нормальный приём сигнала в этих условиях можно путем расширения полосы пропускания УПЧ или стабилизации разностной частоты передатчика и гетеродина.
Первый путь приводит к возрастанию коэффициента потерь Lрф2. Поэтому наиболее приемлемым путём уменьшения потерь, обусловленных расстройкой приёмника по частоте, является второй.
Постоянство разностной частоты можно обеспечить либо за счет стабилизации частот передатчика и местного гетеродина, либо за счет автоматического слежения частоты одного генератора за изменением частоты другого [34].
Первый вариант используется в РЛС с передатчиком, построенным по схеме задающий генератор—усилитель мощности, а второй — в РЛС с мощным автогенератором. Технически задача стабилизации разностной частоты в РЛС с автогенератором решается с помощью систем автоматической подстройки частоты (АПЧ).
9.5. Требования к системам апч и технические решения, обеспечивающие их выполнение
К основным характеристикам систем АПЧ (рис. 9.12) относятся:
полоса схватывания ПАПАЧ;
точность подстройки частоты ΔfАПЧ;
скорость υАПЧ или время tАПЧ автоподстройки.
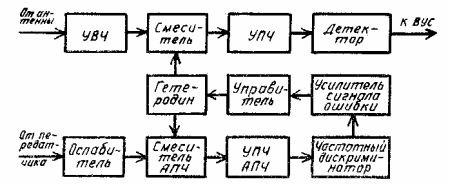
Рис. 9.12. Одноканальная система АПЧ
Полоса схватывания — это диапазон частот, в пределах которого обеспечивается беспоисковая подстройка частоты генератора с заданной точностью.
Значение полосы схватывания определяется полосой пропускания дискриминатора (рис. 9.13).
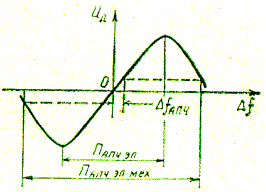
Рис 9.13. Характеристика дискриминатора
При
наличии в РЛС системы перестройки
рабочей частоты полоса схватывания
должна удовлетворять условию![]()
Где Δfсп г, Δfсп мг — максимальные ошибки установки частоты соответственно генератора передатчика и местного гетеродина при перестройке рабочей частоты РЛС.
При отсутствии системы перестройки
![]()
Где Δfmax г, Δfmax мг — максимально возможные уходы частот соответственно генератора передатчика и местного гетеродина из-за дестабилизирующих факторов.
При необходимости обеспечения больших значений ПАПАЧ предпочтение следует отдавать электромеханическим системам АПЧ, поскольку в электронных системах АПЧ увеличение ПАПАЧ связано с трудноразрешимым противоречием между диапазоном электронной перестройки и стабильностью генераторов передатчика и местного гетеродина.
Точность подстройки частоты характеризуется статической ошибкой системы АПЧ, которая определяется соотношением
![]()
(9.9)
где Δfнач — начальная расстройка частоты стабилизируемого генератора относительно частоты эталона;
Кос — результирующий коэффициент усиления разомкнутой цепи, обратной связи системы;
Sд, Sу — крутизна характеристики соответственно дискриминатора и управителя.
Допустимое значение ошибки подстройки частоты системой АПЧ определяется допустимым значением коэффициента потерь Lрф4. Так, например, при выполнении условия числовое значение коэффициента потерь Lрф4 не превышает 0,3 дБ. Из соотношения (9.9) следует, что для повышения точности автоподстройки необходимо помимо всего прочего увеличивать крутизну характеристики дискриминатора. Однако при этом уменьшается полоса пропускания дискриминатора, а следовательно, и полоса схватывания ПАПЧ. Для разрешения этого противоречия используют системы АПЧ с двумя петлями обратной связи, соединёнными с одним управителем (рис. 9.14).
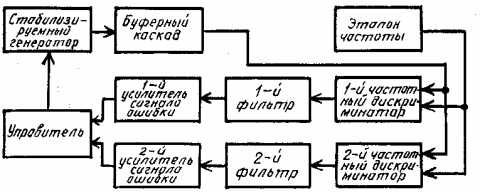
Рис. 9.14. Двухканальная система АПЧ
Первая петля обратной связи имеет дискриминатор с широкой полосой пропускания и полосой схватывания, превышающей диапазон возможных начальных расстроек генератора. В виду малой крутизны дискриминатора остаточная расстройка при работе этой петли обратной связи будет велика, но всегда меньше половины полосы схватывания второй петли обратной связи, имеющей дискриминатор с узкой полосой пропускания, большей крутизной и, следовательно, обеспечивающей значительно меньшую максимальную остаточную расстройку.
Скорость автоматической подстройки частоты является одной из важнейших характеристик системы АПЧ. Требования к ней определяются режимом работы РЛС.
В амплитудном режиме ограничений па скорость АПЧ нет. Современные электронные системы АПЧ при работе РЛС в амплитудном режиме обеспечивают скорость автоподстройки, при которой
tапч = (0,5 ...0,7) τи
где tапч — время, в течение которого начальная расстройка сводится к остаточной;
τи — длительность зондирующего импульса.
При применении электромеханических систем АПЧ
tапч = 0,3…0,6с
При работе РЛС в когерентном режиме изменение частоты генераторов передатчика или местного гетеродина в процессе автоподстройки приводит к расширению спектра флюктуации сигналов на входе системы СДЦ и, следовательно, к уменьшению значения реализуемого коэффициента подавления сигналов пассивных помех. Поэтому в когерентном режиме работы РЛС допустимая скорость АПЧ ограничивается значением, при котором реализуемый коэффициент подавления сигналов пассивных помех уменьшается в допустимое число раз. Это условие (см. § 5.7) представляется в виде
![]()
(9.10)
если в процессе автоподстройки изменяется частота генератора передатчика, и
![]()
(9.11)
если подстраивается местный гетеродин.
Из
соотношений (9.10), (9.11) следует, что скорость
АПЧ при подстройке генератора передатчика
ограничивается условием![]()
, а при подстройке местного гетеродина
![]()
Сопоставляя эти соотношения, можно сделать вывод, что допустимая скорость при подстройке генератора передатчика в Q раз выше, чем при подстройке местного гетеродина. Это означает, что при работе РЛС в когерентном режиме предпочтение следует отдавать АПЧ генератора передатчика.
В случаях, когда время автоподстройки из-за наличия ограничений на допустимую скорость АПЧ оказывается недопустимо большим, применяется прерывистый режим работы системы АПЧ. Временная диаграмма (рис. 9.15) поясняет сущность работы прерывистой системы АПЧ. Во время работы системы АПЧ система СДЦ не работает. Интервал времени между очередными моментами включения системы АПЧ либо устанавливается постоянным с учетом скоростей ухода частот генератора передатчика и местного гетеродина из-за дестабилизирующих факторов, либо изменяется автоматически.
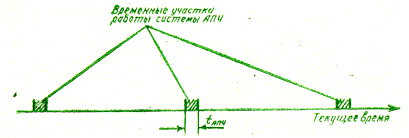
Рис. 9.15. Временная диаграмма работы прерывисто АПЧ
В последнем случае момент включения системы АПЧ определяется моментом начала выхода расстройки по частоте за допустимый предел.