

В.1. Место рлс в радиолокационной системе
Под радиолокационной системой понимают конструктивную совокупность радиотехнических средств, определенным образом размещенных на территории и функционально связанных между собой для решения задачи сбора, обработки и выдачи радиолокационной информации [1].
Радиолокационные системы появились в конце 30-х — начале 40-х годов с внедрением в практику радиолокационных станций (РЛС) для обнаружения самолетов. С целью наблюдения достаточно большой территории РЛС размещались на расстояниях, близких к их дальности действия, координаты целей считывались операторами с индикаторов и передавались по средствам связи на пункты сбора и обработки, а затем на командные пункты истребительной авиации и зенитной артиллерии. Несмотря на низкие характеристики радиолокаторов, средств обработки и передачи данных того времени, они сыграли огромную роль в противовоздушной обороне объектов во время второй мировой войны.
Улучшение характеристик РЛС, автоматизация процессов съема, кодирования и передачи информации, широкое внедрение вычислительной техники привели к качественному скачку в развитии радиолокационных систем. Они начали использоваться в самых различных областях науки, народного хозяйства и военного дела. Широкое применение нашли радиолокационные системы контроля и регулирования воздушного движения и управления полетами, радиоастрономические, радиолокационные системы предупреждения о стихийных бедствиях (грозах, ураганах, цунами) и др.
В соответствии с определением радиолокационная система включает:
радиолокационные средства;
средства обработки радиолокационной информации;
средства передачи радиолокационной информации.
Радиолокационные системы позволяют решать широкий круг задач, определяемых потребителями систем более высокого порядка, в которые они входят. Так, например, радиолокационная система ПВО [2, 13] осуществляет:
радиолокационную разведку воздушного пространства;
опознавание воздушных целей;
контроль за полетом своих самолетов;
наблюдение и выдачу данных о метеообстановке и т. д.
Радиолокационная информация, выдаваемая системой, используется также для оценки воздушной обстановки и решения задач:
целераспределения;
определения необходимого наряда сил и средств ПВО;
целеуказания зенитным ракетным комплексам;
наведения истребителей ПВО на воздушные цели.
Главным преимуществом радиолокационной системы является возможность получения информации с характеристиками, которые практически недостижимы для автономно работающих РЛС. Дальность действия, точность определения параметров движения целей и разрешающая способность у радиолокационных систем существенно выше, чем у радиолокационных средств, работающих автономно [1].
Вместе с тем следует отметить, что характеристики радиолокационных средств в свою очередь влияют на показатели качества системы. Улучшение этих характеристик — один из путей совершенствования радиолокационной системы.
К радиолокационным средствам относятся:
средства активной локации (активные РЛС с пассивным ответом);
средства с активным ответом (активные РЛС с активным ответом), предназначенные для работы по своим объектам;
средства пассивной локации (пассивные РЛС).
Принцип работы активных РЛС с пассивным ответом основан на облучении целей зондирующими сигналами и приеме отраженных от них эхо-сигналов.
Средства с активным ответом используют сигналы специальных ретрансляторов или ответчиков, устанавливаемых на борту своих объектов (истребителей, зенитных ракет и т. п.). Средства пассивной локации принимают сигналы собственного радиоизлучения целей (радиотепловое излучение, излучение собственных радиотехнических устройств и др.). Указанные радиолокационные средства имеют свои особенности построения, обусловленные различием методов радиолокации.
Главное внимание в дальнейшем будет уделено построению наземных РЛС обнаружения, наведения и целеуказания, которые являются основными источниками информации современной радиолокационной системы ПВО.
В.2. КЛАССИФИКАЦИЯ НАЗЕМНЫХ РЛС ОБНАРУЖЕНИЯ
Цель классификации состоит в разделении множества РЛС на группы (классы), обладающие общими признаками, несмотря на многообразие их конструктивных и технических решений. Это дает возможность анализировать особенности построения РЛС с позиций системотехники.
Выбранные для классификации признаки должны отражать наиболее существенные черты РЛС. Число их не должно быть слишком большим, чтобы классификация не потеряла смысл, и не слишком малым, чтобы не обеднять полноту характеристики РЛС. Наиболее полную характеристику РЛС дает классификация, в основу которой положены как тактические, так и технические признаки [6, 7, 13, 14] (рис. В.1).
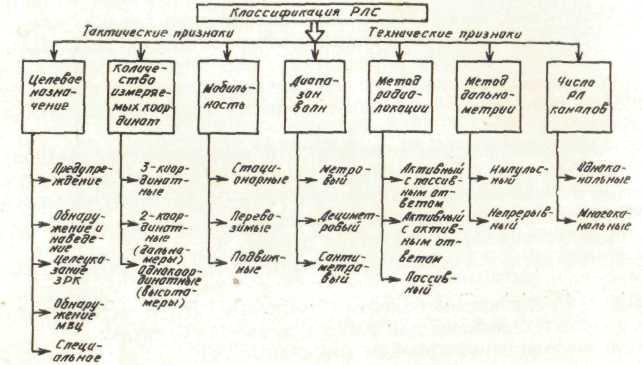
Рис. В.1. Классификация РЛС
К тактическим признакам относятся:
целевое назначение РЛС;
степень мобильности;
количество измеряемых координат и др.
Наиболее существенными техническими признаками являются:
метод радиолокации, используемый в РЛС;
метод дальнометрии или вид зондирующих сигналов;
диапазон рабочих волн (частот);
число независимых радиолокационных каналов.
В соответствии с целевым назначением различают следующие РЛС:
дальнего обнаружения воздушных целей (РЛС предупреждения;
обнаружения маловысотных целей (МВЦ);
обнаружения воздушных целей и наведения на них истребителей;
целеуказания ЗРК; специального назначения.
РЛС предупреждения предназначены для ведения радиолокационной разведки воздушного противника на максимальном удалении от обороняемых объектов, предупреждения о нем и целеуказания средствам обнаружения с меньшей дальностью действия. Обладая наибольшими возможностями обнаружения по дальности и высоте, такие РЛС имеют относительно низкие точностные характеристики. Они, как правило, определяют две координаты: азимут и наклонную дальность и относятся к классу мощных РЛС. Высота целей либо не определяется, либо определяется весьма грубо [13, 14].
РЛС обнаружения и наведения являются основным информационным звеном в системе наведения истребителей ПВО на воздушные цели [2, 6]. Поскольку для решения задачи наведения необходима информация о пространственном положении цели и истребителя, такие РЛС должны измерять три координаты: азимут, дальность и высоту. Кроме того, они должны обладать точностными характеристиками, обеспечивающими успешное решение подобной задачи.
РЛС целеуказания ЗРК должны иметь дальность действия, обеспечивающую выдачу целеуказания с учетом времени для подготовки данных для стрельбы, открытия огня и поражения целей на предельно возможных дальностях. Точностные характеристики должны обеспечивать беспоисковый захват целей станцией наведения ракет [6]. Эти РЛС также должны быть трехкоординатными.
РЛС обнаружения МВЦ предназначены для разведки воздушного противника, действующего на малых высотах. Отличительной особенностью такой РЛС является то, что диаграмма направленности (ДН) ее антенны, с целью реализации предельных возможностей по обнаружению МВЦ, максимально прижимается к земле. Они должны работать в сантиметровом или в дециметровом диапазоне волн и иметь специальную аппаратуру подавления интенсивных отражений от земной поверхности. РЛС обнаружения МВЦ сравнительно маломощны, а потому более компактны и мобильны.
К РЛС специального назначения относятся РЛС с повышенными точностными характеристиками, РЛС закрытия мертвых воронок, РЛС с активным ответом, пассивные РЛС и др.
Как видно из изложенного, целевое назначение РЛС—один из основных тактических признаков, зачастую определяющий не только их тактические, но и технические характеристики. Деление РЛС по другим тактическим признакам (см. рис. В.1) в дополнительных пояснениях не нуждается.
Характеризуя классификацию РЛС по техническим признакам, остановимся лишь на последних двух, поскольку деление РЛС по диапазону волн пояснений не требует, а об особенностях радиолокационных средств, использующих различные методы радиолокации, было сказано в предыдущем параграфе.
По методу дальнометрии РЛС могут быть разделены на две большие группы [7]:
РЛС с импульсным излучением;
РЛС с непрерывным излучением.
Главными достоинствами импульсных РЛС являются простота измерения дальности до цели, а также возможность использования одной антенны для излучения зондирующих и приема отраженных сигналов. К недостаткам относится необходимость применения передатчиков с большими импульсными мощностями и сложность измерения скорости цели, особенно с высокой точностью.
РЛС с непрерывным излучением обеспечивают селекцию целей по скорости и однозначно измеряют скорость в широком диапазоне ее возможных изменений, работают при относительно малой мощности излучения.
К недостаткам РЛС с непрерывным излучением следует отнести сложность развязки приемного и передающего трактов, сложность выходных устройств, особенно при необходимости наблюдения за многими целями по нескольким параметрам.
По виду зондирующих сигналов импульсные РЛС делят на:
некогерентные;
когерентно-импульсные;
с внутриимпульсной частотной модуляцией;
с внутриимпульсной фазовой модуляцией.
В РЛС с непрерывным излучением могут использоваться:
немодулированные незатухающие колебания;
частотно-модулированные колебания;
непрерывные шумоподобные сигналы.
В зависимости от числа радиолокационных каналов РЛС подразделяют на одноканальные и многоканальные [7]. Последние, в свою очередь, могут быть частотно-многоканальными, пространственно-многоканальными и пространственно-частотно-многоканальными.
В частотно-многоканальных РЛС используется несколько приемопередатчиков, работающих на разных частотах, но в пределах одной и той же диаграммы направленности антенны. Цель облучается одновременно на нескольких частотах, а выходные сигналы каналов обрабатываются совместно.
В пространственно-многоканальных РЛС антенна имеет парциальную диаграмму направленности. Сигналы излучаются и принимаются на одной частоте. При этом передатчик может быть общим для всех парциальных каналов. Число приемных каналов должно соответствовать количеству парциальных лепестков.
В пространственно-частотно-многоканальных РЛС в пределах каждого парциального лепестка сигналы излучаются и принимаются на своей частоте.
Достоинством многоканальных РЛС является повышенная помехозащищенность и большая дальность действия, которая обеспечивается увеличением суммарной излучаемой мощности при допустимых значениях пиковой мощности в каждом из каналов. К недостаткам относится большая сложность (прежде всего антенных систем) и малая мобильность.
В.З. ОБОБЩЕННАЯ СТРУКТУРНАЯ СХЕМА РЛС
Несмотря на различие тактико-технических характеристик, вариантов технических решений отдельных систем и используемой элементной базы, РЛС имеют много общего. Это относится, в частности, и к функциональной структуре.
В соответствии с принципом работы активные РЛС:
формируют зондирующие сигналы заданной структуры и излучают электромагнитную энергию в заданном направлении;
принимают и обрабатывают отраженные от целей сигналы;
обеспечивают принятие решения о наличии цели, измерение ее координат и параметров движения.
Для выполнения этих задач в состав РЛС входят:
система формирования зондирующих сигналов;
антенная система, обеспечивающая направленное излучение зондирующих и прием отраженных сигналов. Для создания необходимой формы зоны обзора и обеспечения возможности определения угловых координат обнаруживаемых объектов осуществляется сканирование (механическое или электронное) антенного луча в соответствующих плоскостях;
система обработки принимаемых сигналов, осуществляющая максимизацию качества обнаружения целей при наличии различного рода помех, представляющая собой совокупность устройств усиления сигналов, согласованной фильтрации и защиты от активных и пассивных помех;
система принятия решения о наличии цели, измерения ее координат и параметров движения, представляющая собой систему индикатор РЛС—оператор в РЛС с визуальным съемом координат и спецвычислитель — в РЛС с автоматическим съемом координат.
Антенная система при работе на излучение совместно с системой формирования зондирующих сигналов образует тракт генерирования и излучения зондирующих сигналов РЛС. Приемные антенны совместно с системой обработки принимаемых сигналов образуют тракт приема и выделения сигналов из помех. Структура и параметры этих двух трактов определяют наиболее важные характеристики РЛС. Кроме указанных в состав РЛС входят:
система синхронизации, обеспечивающая синхронную работу всех трактов и систем РЛС;
система управления режимами работы РЛС, позволяющая выбирать оптимальный режим в конкретной воздушно-помеховой обстановке;
система электропитания;
ряд дополнительных систем и устройств, обеспечивающих нормальное функционирование ее основных трактов и систем (система вентиляции и охлаждения, система контроля, устройства защиты от перегрузок, устройства развязки и т. п.).
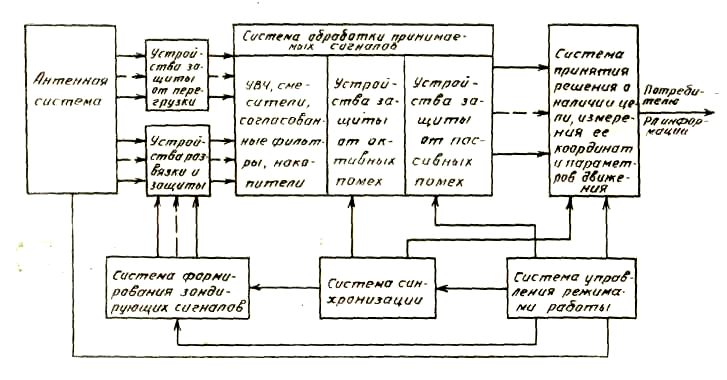
Рис. В.2. Обобщенная структурная схема РЛС
Обобщенная структурная схема РЛС (рис. В.2) отличается от структурной схемы конкретной РЛС тем, что содержит лишь основные функционально необходимые системы и устройства. Современная РЛС представляет собой сложное радиотехническое устройство как по количеству элементов и узлов, так и по многообразию взаимосвязей между ними. Поэтому грамотная эксплуатация РЛС, состоящих на вооружении, успешнее освоение новых образцов в кратчайшие сроки возможны лишь при глубоких знаниях принципов их построения, потенциальных возможностей различных вариантов технической реализации трактов и систем и влияния параметров последних на характеристики РЛС.