

9.10.3. Накопление дополнительного шума на экране элт
Накопление дополнительного шума на экране ЭЛТ возникает когда геометрические размеры сечения электронного луча в плоскости экрана превышают соответствующие размеры сигнала на экране при бесконечно узком электронном луче (рис. 9.28).
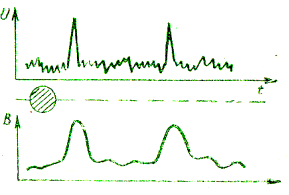
Рис. 9.28. Иллюстрация сущности накопления
дополнительных шумов на экране ЭЛТ
Как видно из рисунка, за счёт конечных размеров сечения луча в элемент разрешения на экране ЭЛТ кроме сигнала добавляются и мешающие шумовые всплески. Число разрешаемых элементов на развертке уменьшается в ψ раз:
![]()
Где dл — диаметр электронного луча в плоскости экрана ЭЛТ;
υр — скорость развертки;
τи — длительность видеоимпульса.
Числовое значение коэффициента потерь Lнш2, возникающих в рассматриваемом случае, при одинаковых периодах ложной тревоги до и после индикатора определяется по графикам (рис. 9.9).
Для пользования графиками нужно знать коэффициент совмещения υ = ψ – 1 и число импульсов в пачке. Из рисунка видно, что при υ = 1 коэффициент потерь равен единице. При дальнейшем повышении скорости развертки появляются весьма существенные потери за счет ухудшения наблюдаемости отметки сигнала на экране ЭЛТ. Таким образом, потери за счет накопления дополнительных шумов на экране ЭЛТ можно практически исключить путём выбора оптимальной скорости развертки индикатора из условия
![]()
Используя это условие, можно определить диапазон дальностей ΔRопт (масштаб индикатора), просматриваемый на экране ЭЛТ, при котором потери за счёт накопления дополнительных шумов на экране ЭЛТ практически отсутствуют:
![]()
где Lр — длина развертки на экране ЭЛТ.
9.10.4. Накопление дополнительного шума в вус
Потери за счёт накопления шума в ВУС возникают в тех случаях, когда при оптимальной полосе пропускания УПЧ полоса пропускания ВУС не равна бесконечности.
Методика расчета коэффициента потерь Lнш3 за счет сужения полосы пропускания ВУС аналогична методике расчета Lнш2 за счёт накопления шума на экране ЭЛТ. Коэффициент совмещения при расчете потерь, обусловленных ВУС, определяется соотношением
![]()
где Пвус — полоса пропускания ВУС;
Пупч опт — оптимальное значение полосы пропускания УПЧ.
Расчеты и экспериментальные исследования [36] показывают, что потери становятся пренебрежимо малыми при выборе Пвус (при оптимальной полосе пропускания УПЧ) из условия
![]()
9.11. Потери за счет ограничения сигналов сверху
Как уже отмечалось в гл. 6, ограниченность динамического диапазона приёмника при воздействии внешних помех может привести к возникновению существенных потерь в отношении сигнал—шум. Числовое значение коэффициента потерь Loгp за счет ограничения сигналов сверху в функциональных элементах тракта приёма, осуществляющих согласованную фильтрацию, либо включенных после согласованных фильтров, можно оцепить по графику (рис. 6.1).