

16.3.4, Параметры ацп
К основным параметрам АЦП относятся [52]: динамический диапазон;
частота преобразования (дискретизации) Рд (период днекрет'п зации — Гд);
время преобразования; разрешающая способность; погрешность преобразования.
Динамический диапазон АЦП определяется отношением максимального сигнала к среднему квадратическому значению шумов квантования.
Для ндеалького т-разрядного АЦП с нормализованным к единице максимальным значением динамический диапазон, выраженный в децибелах:
![]()
Из-за несовершенства отдельных элементов преобразователя, ухода параметров в зависимости от времени, температуры, нестабильности источников питания и т. д. характеристики квантования реальных АЦП отличаются от идеальных, что является причиной появления дополнительных шумов. Если их выразить через шумы квантования, т. е. считать, что Одои = £окв (I > 0), то динамический диапазон реальных ЛЦП
![]()
Наличие дополнительных шумов приводит к потерям динамического диапазона. Например, при 1= 1, когда стД1Ш = от, отношение сигнал—шум на выходе реального АЦП уменьшается па 3 дБ.
При Сдоц = /2 Ока потери составляют 6 дБ, что практически означает потерю младшего разряда. Отсюда следует, что если дополнительные шумы имеют тот же порядок, что и шумы квантования, то увеличивать разрядность АЦП бессмысленно. Это обусловливает трудности создания многоразрядных АЦП, поскольку с уменьшением шумов квантования доля дополнительных шумов возрастает.
Частота преобразования (дискретизации) Рд — это частота, с которой происходит образование выборочных значений сигнала. Она определяет требование к быстродействию АЦП и должна вы бираться в соответствии с соображениями, рассмотренными в 16.3,1... 21. Зак. 88. 831
Время преобразования i-щ, — это время от начала импульса дискретизации (качала преобразования) до появления на выходе АЦП устойчивого кода, соответствующего выборке входного сигнала. При работе бел устройств выборки и запоминания оно определяет достижимую частоту дискретизации.
Разрешающая способность— это способность АЦП различать два значения входного сигнала. Определяется количеством различных кодовых комбинаций на выходе АЦП и выражается либо в битах (число разрядов), либо как динамический диапазон в децибелах.
Погрешность преобразования обусловлена эффектом квантования и отличием реальной характеристики квантования от идеальной. В качестве меры ее оценки может служить мощность шумов квантования реальных АЦП.
Следует отметить, что параметры АЦП взаимосвязаны друге другом и являются результатом компромисса между различными противоречивыми требованиями: точностью и быстродействием, точностью и сложностью, быстродействием и стоимостью. Этим объясняется и большое многообразие практических схем АЦП.
16.3.5. Типы ацп
По способу преобразовании выборочных значений сигнала в цифровые эквиваленты все АЦП могут быть сведены в три класса: последовательные, параллельные и последовательно-параллельные.
Принцип действия последовательных АЦП основан на процедуре последовательного приближения цифрового эквивалента к преобразуемой величине, которая может быть реализовала с помощью единичных или двоично-взвешенньк приближений. Структурная

Рис.
16.6. Последовательный АЦП;
а
-с
единичными приближениями;
б —
с поразрядным кодированием
схема АЦП с единичными приближениями приведена иа рис. 16.6а. Принцип его работы состоит в1 следующем. На входы компаратора К подается преобразуемый входной сигнал и напряжение обрат-
322
ной связи iioc с выхода цифроаналогового преобразователя (ЦАП) 2, питаемого от источника опорного напряжения /. В случае, когда «в* > «ос, напряжение на выходе компаратора соответствует логической единице, а в случае aBS. <L «ос —логическому нулю. С приходом импульса запуска схема управления 4 вырабатывает разрешающий сигнал на схему &, через которую из вход счетчика 5 начинают поступать счетные импульсы с генератора 3. Число накопленных импульсов представляется в счетчике параллельным двоичным кодом. Последний с помощью ЦАП преобразуется в аналоговый сигнал иое, который подастся на вход компаратора. Преобразование длится до тех пор, пока этот сигнал сравняется, с входным сигналом. Далее компаратор срабатывает н прекращает поступление импульсов на счетчик. Одновременно выходной сигнал компаратора используется для считывания выходного кода. Время преобразования п таком АЦП является переменным и зависит от величины входного сигнала. Его масималь-ное значение (щ„„а1 = (2"1 — 1) Т1>ч, где Тач — период следования Учетных импульсов.
При ' большом числе разрядов быстродействие таких АЦП мало. Например, при m — 10 и Тсч = 1 мке (fn4 = 1 МГц) /др = = 1 024 мке, что обеспечивает максимальную частоту дискретизации ^дтах » 1 кГц.
При использовании ЛЦП с двоично-взвешенным приближением (поразрядным кодированием) (рис. 16.65) быстродействие может быть существенно увеличено. В основу его работы положен принцип последовательного сравнения измеряемой величины с 1/2, 1/4, 1/8 и т. д. от возможного ее максимального значения {принцип дихотомии). С приходом импульса запуска в генераторе одиночного импульса 2 вырабатывается сигнал, соответствующий единице, который записывается в старший разряд сдвигающего регистра 3, вследствие чего разрешается запись единицы в управляющий триггер 4, соответствующий старшему разряду. Все остальные триггеры находятся в нулевом состоянии. Таким образом, на вход ЦАП 5 поступает код 100... О, соответствующий числу '1т-Л или практически половине максимального значения. Если выходное напряжение ЦАП uin. > uBS, то компаратор К срабатывает и импульсы с его выхода подаются на й-вход триггера, устанавливая последний в нулевое состояние. Если же «U!; <Z «Ex, то ам-пульс пс вырабатывается, и трип ер сохраняет единичное состояние. С приходом следующего импульса с генератора импульсов сдвига 1 записывается единица й следующий триггер. В зависи-моети от исхода предыдущего сравнения па ЦАП поступает код 110 ...00 или 010... 00, и вновь с помощью компаратора проверяется значение разряда (0 или 1) и т. д. Полное преобразование заканчивается, таким образом, за m сдвигов (итераций), а выигрыш в быстродействии по сравнена» с АЦП с единичными при-
323
ближениями равен примерно 2"'/ш. раз и достигает при /rcj^lO двух и более порядков. Частота дискретизации в АЦП с поразрядным кодированием составляет единицы мегагерц, что и определяет возможности их использования и устройствах цифровой обработки радиолокационных сигналов.
Принцип действия параллельных АЦП основан на одновременном квантовании сигнала с помощью набора компараторов. Числе
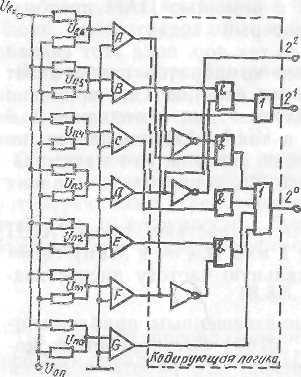
компараторув выбирается равным 2т— 1, а пороговые уровни уста-навлива ются с помощью резистив-ного делителя, подключенного к источнику опорного напряжения, в соответствии с используемой шкалой квантования.
Структурная схема трехразрядного параллельного АЦП представлена на рис. 16.7. При подаче входного сигнала срабатывают псе те компараторы, у которых порог меньше, чем входной сигнал. Получающийся при этом унитарный код с помощью кодирующей логики преобразуется В ДВОИЧНЫЙ.
Главным достоинством параллельных АЦП является их высокое быстродействие. Частоты преобразования достигают значений 100 ... - 20° МГЧ [Щ- Однако их объем приблизительно удваивается с каждым новым разрядом. Поэтому разрядность таких АЦП обычно не превышает 8 ... 10.
Рис.
16.7. Трехразрядный параллельный
ДЦП
Учитывая то обстоятельство, что за Тл необходимо осуществить обработку в одном элементе разрешения и что большее время уходит на выполнение арифметических операций, даже быстродействующие АЦП должны включаться п видеотракт РЛС или, в исключительных случаях,— в тракт промежуточной частоты.
16.3.6. Цифровые коды, используемые в АЦП
В АЦП должны использоваться те же коды, что и в работающем совместно с ним спецвычислителе системы обработки сигналов. В связи с этим наибольшее применение нашли различные представления двоичного кода: прямой, обратный и дополнительный.
324
При представлении в прямом коде число имеет цифровые разряды, определяющие его значение и старший знаковый разряд. Бели число положительное, то в знаковом разряде ставится нуль, у если отрицательное — единица.
Удобство такого представления состоит в том, что при умножении звух чисел знак произведения можно определить, суммируя знаки сомножителей но правилам двоичной арифметики. В прямом коде просто выполняются операции умножения и деления чисел: Однако его недостатком является необходимость применения of-дельных устройств для выполнения операций сложения и вычита3 пня. Для прямого кода характерно также двойное представление пуля: положительный нуль представляется в виде + 0 — 0.00.:: ... 00, отрицательный нуль —0 = 1.00 ...00.
Обратный код имеет старший разряд Ьп с отрицательным весом, равным (—2" + 2-"1).
Для положительных чисел Ьк = 0, а для отрицательных Ьп = = 1. Представление одного и того же положительного числа в прямом и обратном кодах совпадает. Отрицательные числа при представлении в обратном коде имеют в знаковом разряде единицу, а в цифровых - значения, обратные прямому коду.
Достоинством этого кода является возможность замены операции вычитания двух положительных чисел в прямом коде их сложением в обратных кодах. Числа в обратный код также переводятся достаточно просто. Если отрицательное число хранится в регистре, предетавлящем собой цепочку триггеров, то на одних выходах триггеров фиксируется прямой код, а на других ■—обратный. Недостаток обратного кода состоит в необходимости осуществления циклического перенося единицы из старшего разряда в младший, если она возникает при сложении двух чисел. Пуль в обратном коде также имеет двойное представление: положительный нуль 0.00... 00 и отрицательный нуль 1.11 ... 11.
Дополнительный код также позволяет заменить операцию вычитания двух положительных чисел операцией их сложения. Он имеет старший (знаковый) разряд Ьп с отрицательным весом, равным —2п.
Для положительных чисел Ьп = 0, и их представление в прямом и дополнительном кодах совпадает. Для отрицательных чисел Ьп = 1. Для получения дополнительного кода необходимо к обратному коду прибавить единицу младшего разряда. При сложении двух чисел в дополнительном коде не требуется производить операцию циклического переноса единицы в младший разряд, что повышает быстродействие устройств, работающих в этом коде. Кроме того, нуль в дополнительном коде имеет единственное представление 0.00 ... 00. Указанные достоинства дополнительного кода предопределяют его преимущественное использование в устройствах цифровой обработки.
325
Рассмотренные представления отрицательных чисел лежат в основе построения биполярных АЦП (рис. 16.8). В параллельном биполярном АЦП, работающем а прямот коде (рис. 16.8а), в знаковом компараторе КО положительным сигналам ставится и соответствие пуль, отрицательным -единица.
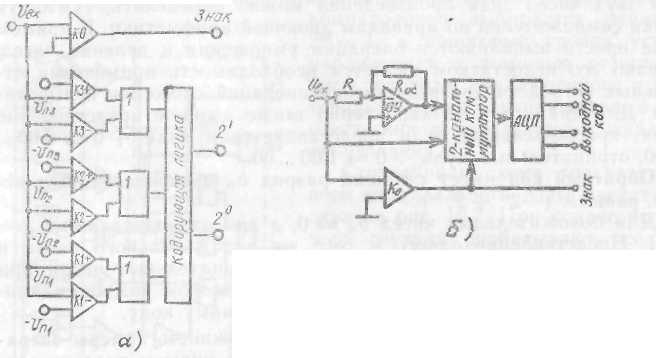
Рис. 16 8. Биполярный АЦП: о — без инвертирования входного сигнал;!: б — с инвертированием входного сигнала
В создании значений цифровых разрядов принимают участке компараторы, помеченные для положительных чисел знаком + (плюс), для отрицательных — знаком — (минус).
Другой способ построения биполярных АЦП состоит в использовании униполярного АЦП совместно с инвертирующим усилителем (рис. 16.86). 15 таком ЛЦП знаковый компаратор управляет коммутатором, через который на вход АЦП проходи! либо прямой, либо инвертированный сигнал, имеющий одну полярность. Униполярный преобразователь можно использовать для работы с биполярными входными сигналами, если к последним предварительно добавить постоянное положительное напряжение Но = Отаэх + Л. Тогда максимальный отрицательный сигнал будет соответствовать единице младшего разряда АЦП, т. е. представляться в виде 00... 01. Тот же результат можно получить при работе АЦП в так называемом смещенном двоичном коде, который образуется прибавлением числа 2" к прямому коду.
Не останавливаясь подробно па этом коде, отметим, что он менее удобен для выполнения арифметических операций. Так, например, сложение двух одинаковых по значению, но противоположных по знаку величин в смещенных кодах приводит не к нулевому,- а к максимальному (по абсолютной величине) результату.
Между всеми кодовыми представлениями существуют взаимно однозначные соответствия. Это позволяет достаточно легко реалн-
32а
зовывать биполярные АЦП, работающие в любим из кодов: прямом, обратном, дополнительном и смещенном.
tfi-4. ОСОЬЕННОСГИ ПОСТРОЕНИЯ ЦИФРОВЫХ ОБНАРУЖИТЕЛЕЙ НЕКОГЕРЕНТНЫХ СИГНАЛОВ ПРИ БИНАРНОМ КВАНТОВАНИИ