

16.5. Особенности построения цифровых обнаружителей
НЕКОГЕРЕНТНЫХ СИГНАЛОВ ПРИ МНОГОУРОВНЕВОМ
КВАНТОВАНИИ
16.5.1. Вычислитель модуля
При многоуровневом квантовании обнаружитель некогерентных сигналов включает в себя вычислитель модуля (амплитуды) выборок входного сигнала, цифровой накопитель и цифровой компаратор.
С помощью вычислителя модуля получают код огибающей входных сигналов для сокращения аппаратурных затрат в РЛС, имеющей квадратурные каналы. В общем случае значение модуля /1-й выборки входного сигнала
![]()
Х(п) = yx*{n)+xf(n), (16.11)
где Xi{n), X'i (я)—сигналы на выходах ЛЦП квадратурных
каналов (коды).
Вычисление модуля в соответствии с (16.11) требует значительных аппаратурных затрат, вызванных необходимостью осуществления операций умножения. Поэтому на практике используют приближения вида
![]()
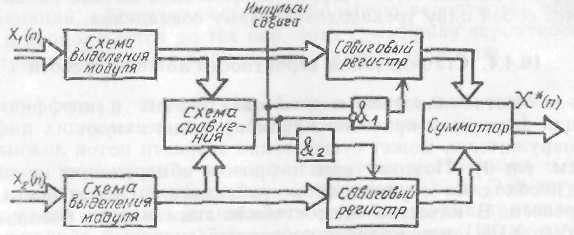
Операция (16.12) осуществляется простым логическим устройством (рис. 16.13), так как умножение на коэффициент 0,5 выполняется путем сдвига кода числа на один разряд вправо (в сторону младших разрядов). Потери при замене операции (16.11) one-
331
рацией (16.12) не превышают 0,5 дБ. Схема выделения модуля сигнала в квадратурном канале представляет Собой лреобразо-патель из обратного или дополнительного кодов в прямой с последующей заменой (если это необходимо) значения знакового
Put. 1(3.13. Вычвслятель модуля
разряда с 1 на 0. Схема сравнения может быть выполнена на бале сумматора, осуществляющего вычитание сигналов квадратурных каналов. В зависимости от знака разности разрешающий потенциал подается либо на схему &}, либо на схему &2, через которые подаются импульсы сдвига па соответствующие регистры.
16.5.2. Цифровые накопители
Основными элементами цифрового накопителя (рис. 16.14), включаемого в каждый канал дальности, являются: М-разрядныи,
Рис. I6.I4. Цифровой накопитель
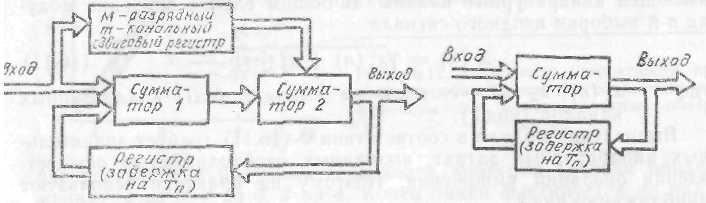
Рис. 16.15. Накапливающий сумматор
/ГС-канальный сдвиговый регистр, выполняющий роль ЗУ сигналов пачки, и накапливающий сумматор (рис. 16.15), в цепь которого дополнительно включен сумматор 2. С выхода сдвигового регистра сигналы на вход сумматора 2 поступают в обратном коде с тем, чтобы обеспечить вычитание этих сигналов из сигналов, циркули-
332
рующих в накапливающем сумматоре. Рассматриваемый накопитель в сочетании с цифровым компаратором по существу представляет собой обнаружитель типа движущегося окна, оперирующий с многоразрядными кодами сигналов. Сложность технической реализации (из-за наличия ЗУ достаточно большой емкости) при небольшом выигрыше в отношении сигнал—шум по сравнению с бинарным накопителем ограничивает использование этого накопителя лишь случаями, когда в РЛС так или иначе должно быть предусмотрено ЗУ входных сигналов соответствующей емкости (например, для обеспечения работы системы СДЦ). Значительно меньше аппаратурных затрат требует квазноптималь-

Рис. 16 16. Цифровой ренипк>.1итор Рис. 16.17, Ослабитель с коэффициентом
передачи {1—2-"] па основе сумматора
ный накопитель — цифровой рецнркулятор (рис. 16.16). Он представляет собой накапливающий сумматор, в цепи обратной связи которого включен ослабитель с коэффициентом передачи
![]() (16.1.4)
(16.1.4)
где п — натуральное число, определяемое для пачки с прямоугольной огибающей из условия | I,26/Af — 2~" | = min. Выбор значения коэффициента обратной связи в соответствии с (16.13) lie приводит к существенному увеличению потерь в рецир-куляторе (см. гл. 9) и имеете с тем позволяет избежать необходимости применения умножителя в цепи обратной связи рециркуля-тора [24]. При таком значении р сигнал на выходе ослабителя представляется в виде
![]()
(16.14)
Деление на 2" осуществляется сдвигом кода делимого на п разрядов вправо. Поэтому операцию (16.14) можно выполнить с помощью сумматора, на один вход которого поступает код сигнала £/выхред, а на второй — обратный код иаыхрщ со сдвигом на я разрядов вправо (рис. 16,17).
Для исключения возможности перегрузки рециркулятора (переполнения разрядной сетки) и обеспечения защиты от НИП входные сигналы рециркулятора должны подвергаться нормировке, например, с помощью цифровых схем ШАРУ с регулированием вперед.
16.5..'}. Устройство стабилизации вероятности ложной тревоги
При многоуровневом квантовании для стабилизации Рлт обычно используют цифровую ШАРУ (рис. 16.18) с регулированием вперед (см. гл. 6). Роль линии задержки с отводами через т.. вы нолпяют регистры, осуществляющие запоминание кодов сигналов I! смежных участках дальности, число которых выбирается кратным двум (для упрощения технической реализации устройства нормировки).
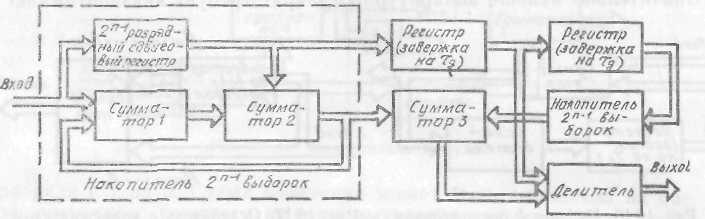
Рис. 16 18 Цифровая ШАРУ
Основными элементами цифровой ШАРУ являются дна накапливающих сумматора, осуществляющие накопление сигналов с 2"~] элементов дальности каждый, и /аза регистра задержки па Уд, исключающие участие сигнала анализируемого канала дальности п оценке интенсивности мешающих шумов. Первый накапливающий сумматор суммирует сигналы с участков дальности, предшествующих анализируемому, а второй с последующих. Деление на 2" иыхидмых сигналов сумматора 3 осуществляется путем сдвига кода на п разрядов вправо. Нормирующее устройство (делитель) выполняет операцию деления сигнала анализируемого участка дальности на оценку интенсивности шумов.
1&6. ЦИФРОВЫЕ ИЗМЕРИТЕЛИ КООРДИНАТ ЦЕЛИ
В РЛС с цифровой обработкой сигналов дальность до цели определяется, как правило, соотношением г" = 1сТя/2, где i- помер канала дальности, в котором находится сигнал цели.
Примечание. При многоуровневом квантовании сигналов по амплитуде л in повышения ючности измерения дальности иоле! производиться нссопая (с учетом формы импульса) обриботку сигналов в смежных каналах дальности.
Цифровой измеритель азимута может быть реализован с помощью устройства (рис. 16.19), включающего обнаружитель с
334
фиксацией границ пачки, преобразователь угла поворота антенны в цифровой кол и схему определения центра пачки.
Рис. 16.19. Цифровой измеритель азимута
Импульсы начала и конца пачки используются для считывания кода азимута с преобразователя, а измеренное значение азимута цели (оценка азимута) определяется но формуле
(16.15)
![]()
где рн, рк- -азимуты начала и конца пачки соответственно.
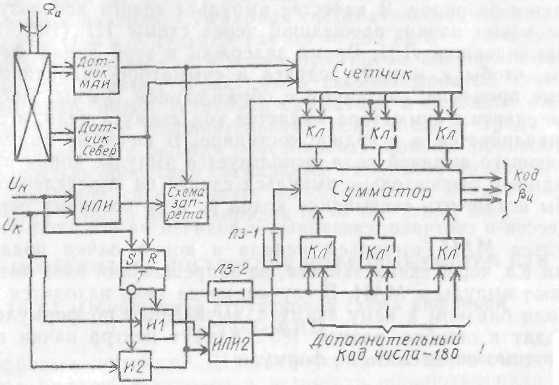
Преобразователь азимута в цифровой код включает датчик масштабной отметки «сеиер», датчик масштабных азимутальных импульсов (МАИ) и m-разрядный двоичный счетчик. Число разрядов счетчика выбирается из условия т = ]\ogn (1 + 36О/Дмаи)[, где Амли—дискретность масштабных азимутальных яипульсов п
градусах.
Схема определения центра пачки состоит из сумматора, ключей
Кл н Кл и устройства управления (триггер Т, схемы Ш, И2, ИЛИ, ИЛИ2, линии задержки Л31, Л32).
Рассмотрим функционирование устройства. Импульсом «Север» счетчик устанавливается в нулевое состояние, а затем начинает счет МАИ, приходящих на его вход с Датчика МАИ. Параллельный двоичный код текущего значения азимута подается на ключи Кл. На второй вход,этих ключей поступают в качестве коммутирующих сигналов импульсы начала или конца пачки. При приходе с обнаружителя импульса начала пачки ив из счетчика в сумма-
335
тор переписывается код азимута рн, а при приходе импульса конца пачки их — код азимута (V. Б сумматоре оба числа складываются и делятся пополам путем сдвига на один разряд в сторону младших разрядов. В качестве импульса сдвига используется импульс конца пачки, прошедший через схемы И1 (И2), ИЛИ2 и линию задержки Л31. Бремя задержки в этой линии выбирается таким, чтобы к моменту сдвига в сумматоре закончились переходные процессы, связанные с образованием суммы. После окончания сдвига с сумматора выдастся код азимута цели, и сумматор устанавливается в исходное состояние. В качестве импульса, управляющего выдачей кода, используется импульс конца пачки, задержанный относительно импульса сдвига на определенное время. Чтобы исключить считывание кодов рн и р„ во время переходных процессов в счетчике, связанных с подачей на его вход очередного импульса МАИ, импульсы начала и конца пачки подаются на ключи Кл через схему запрета, на запрещающий вход которой поступают импульсы МАИ. В случае, когда цель находится на нулевом пли близком к нему азимуте, вычисления по формуле (16.15) приводят к ошибке, равной 180°. Азимут центра пачки при этом необходимо определять по формуле
— 180°. (16.16)
Операцию пычитапия можно заменить операцией сложения чисел в обратном или дополнительном коде. Использование дополнительного кода предпочтительнее, поскольку нуль в этом коде имеет единственное представление. Переход к вычислению по формулам (16.15), (16.16) происходит автоматически по следующему критерию: если импульс «севера» находится вне интервала пачки, то вычисление необходимо производить по формуле (16.15), а если внутри — по формуле (16.16).
В первом случае с триггера Г, который устанавливается в единичное состояние импульсом начала начки, подается разрешающий потенциал на схему И1, и импульс конца пачки, используемый для сдвига суммы, поступает на сумматор через И1, ИЛИ2, Л31, что сооответствует вычислению по формуле (16.15). Во втором случае до прихода импульса конца пачки триггер импульсом «север» перебрасывается в нулевое состояние, и разрешающий потенциал подается па схему И2. Импульс конца пачки с выхода схемы И2 подастся через ИЛИЯ, Л31 для сдвига суммы, а чере;>
Л32—на ключи Кд, обеспечивая подачу на вход сумматора дополнительного кода числа—180. Бремя задержки в Л32 выбирается таким, чтобы в сумматоре закончились переходные процессы, связанные со сдвигом.
Оценим ошибку, вносимую данным устройством я суммарную ошибку измерения азимута. Она имеет систематическую и случайную составляющие. Систематическая составляющая обусловлена
338
![]()
тем, что импульсы начала и конца пачки выдаются только после выполнения соответствующих критериев. Так, например, для алгоритма «1/1—к» имеет место смещение вправо момента фиксации начала пачки на (/—1) позицию, а момента фиксации конца пачки — на к позиций. Суммарная систематическая ошибка при этом Дрсист = (I + к -— 1) Лр/2. где Др = 360°7\т/(3 — угловое расстояние между импульсами в пачке; /,,— время однократного обзора зоны. Эта ошибка может быть скомпенсирована схемным путем, например, путем установки сумматора в исходное состояние, соответствующее дополнительному коду числа—Арсист- Случайная составляющая ошибки обусловлена, главным образом, несимметричностью пропусков сигнальных импульсов на краях пачки, где отношение сигнал—шум мало. Среднее квадратическое значение этой ошибки имеет порядок оц = (0,7... 0,9) Др.
В цифровых системах СДЦ наиболее полно проявляются преимущества цифровых методов и устройств обработки радиолокационных сигналов (54, 55). Их принципиальным отличием от обычных систем СДЦ является цифровая реализация гребенчатого фильтра подавления (рис. 16.20).
16.7. ОСОБЕННрСТИ ПОСТРОЕНИЯ ЦИФРОВЫХ СИСТЕМ СДЦ
16.7.1. Обобщенная структурная схема цифровой системы СДЦ
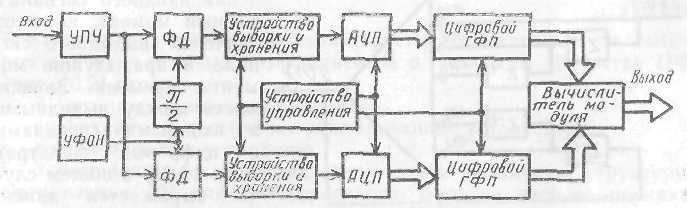
Рис. 16.20. Обобщенная структурная схема цифровой системы СДЦ
Коэффициент подавления ПП, реализуемый в цифровых системах СДЦ. определяется соотношением
![]()
где Кпп upw — предельно достижимый коэффициент подавления ПП для заданных структуры цифрового гребенчатого фильтра подавления (ЦГФП), параметров ПП и динамического диапазона тракта до АЦП;
337
Л'пплци~ 10'"'"'"' (здесь in — разрядность АЦП); Кит —коэффициент подавления, обусловленный нестабильностью г-ru функционального узла РЛС (генератора СВЧ, местного и когерентного гетеродинов).
Из (16.17) видно, что использование цифровой системы СДЦ еще не является гарантией высокой помехозащищенности РЛС от ГТП. Для полной реализации ее возможностей необходимо принимать меры по стабилизации параметров зондирующего сигнала, частот гетеродинов и расширению динамического диапазона приемного тракта (/),„>> Лпптц)-
Цифровые ГФП могут обрабатывать сигналы по временной или частотной областях. В первом случае ЦГФП являются эквивалентом аналоговых устройств ЧПК соответствующей кратности (с обратными связями или без них), а во втором — набора доплеров-ских фильтров корреляционно-фильтровых систем СДЦ.