

5.11. Фильтровые и корреляционно-фильтровые системы сдц
5.11.1. Фильтровые системы сдц
Фильтровые системы СДЦ используются при высоких требованиях к помехозащищенности РЛС и условиях ПП. В этом случае
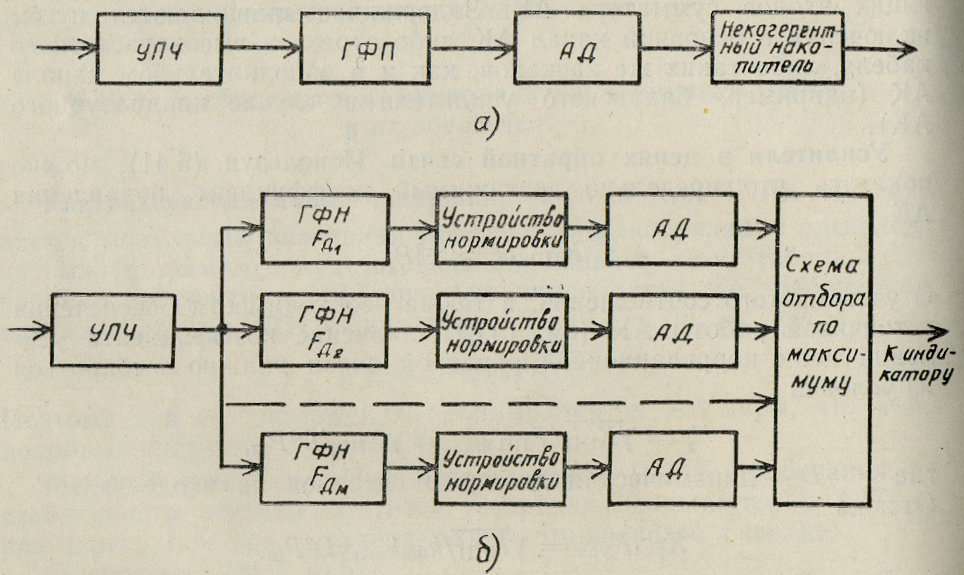
Рис. 5.34. Система обработки с фильтровой СДЦ: а – при некогерентном накоплении;
б – при когерентном накоплении
РЛС, как правило, работает в режиме истинной внутренней когерентности и система СДЦ представляет собой режекторный фильтр с АЧХ вида (5.17). Такая характеристика называется гребенчатой, а РФ — гребенчатым фильтром подавления (ГФП).
Структура системы обработки сигналов с фильтровой СДЦ определяется способом накопления отраженных сигналов. При некогерентном накоплении она имеет вид, представленный на рис. 5.34а, при когерентном — на рис. 5.34б.
Некогерентное накопление используется с целью упрощения технической реализации системы обработки в случае, когда нет необходимости в использовании информации о скорости.
Гребенчатые фильтры подавления могут быть выполнены либо на линиях задержки с числом отводов через tз = Тп , равным числу импульсов в пачке М, либо в виде последовательно соединённых РФ с заданной полосой режекции Пр и разносом по частоте, кратным Fn. Количество таких фильтров Пи/Fп=Q (здесь Q — скважность импульсов). Компенсация действия ветра осуществляется путём включения СКДВ на входе ГФП.
При когерентном накоплении отраженных сигналов, принципиальная возможность которого появляется в случае использования истинной внутренней когерентности, роль ГФП могут выполнять устройства нормировки выходных сигналов скоростных каналов с коэффициентом передачи Ki = 1/Рпп вых i (здесь Рпп вых i — мощность сигналов ПП на выходе i-го скоростного канала). В качестве таких устройств при протяжённых источниках ПП могут применяться схемы ШАРУ. Использование устройств нормировки исключает необходимость применения СКДВ.
Скоростной канал представляет собой гребенчатый фильтр накопления (ГФН), настроенный на соответствующую доплеровcкую частоту. Такой фильтр также может быть выполнен либо на линиях задержки с отводами (рис. 5.35а), либо на узкополосных фильтрах с полосой пропускания
Пф = Fп/М и с разносом по частоте, кратным Fn (рис. 5.35б).
Количество узкополосных фильтров для реализации одного ГФН должно быть равным Пи/Fп=Q , число скоростных каналов в системе обработки равно числу импульсов в пачке М.
Таким образом, суммарное количество узкополосных фильтров, потребное для реализации всех ГФН, равно MQ. Эти фильтры настраиваются на разные частоты с разносом, равным Fn/M.
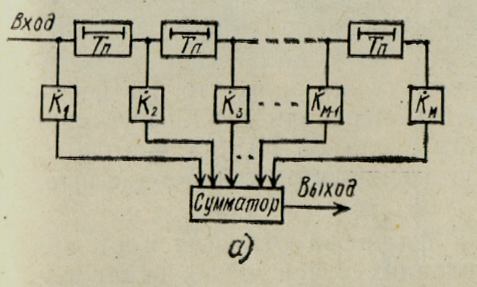
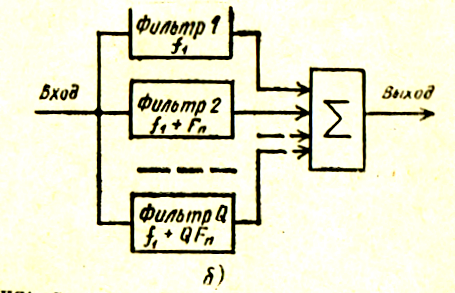
Рис. 5.35. Гребенчатый фильтр накопления: а —на линии задержки с отводами;
б — на узкополосных фильтрах
Добротность их, особенно при работе системы СДЦ на промежуточной частоте, должна быть очень высокой. Например, при fпр = 30МГц, М=10, Fп = 300Гц она составляет Qф = fпр/Пф = . Такую высокую добротность можно обеспечить только лишь в пьезокерамических фильтрах. Сложность технической реализации как самой фильтровой системы СДЦ, так и РЛС в целом, является основным препятствием к практическому применению таких систем.