

6.2.2. Шумовая автоматическая регулировка усиления
Прежде всего следует подчеркнуть, что все системы АРУ начинают работать, как правило, с задержкой, т. е. по достижении сигналом на входе и выходе приёмника некоторого начального
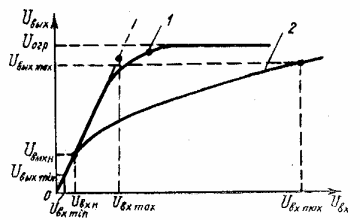
Рис. 6.2. Амплитудная характеристика приемника: 1 - без АРУ; 2 - с АРУ
уровня Uвхн и Uвыхн (рис. 6.2). Благодаря задержке обеспечивается максимальное усиление слабых сигналов. При Uвх < Uвхн, цепь АРУ отключена и приёмник имеет постоянное максимальное усиление (начальный линейный участок амплитудной характеристики на рис. 6.2). При Uвх > Uвхн с ростом входного сигнала уменьшается коэффициент усиления приёмника, вследствие чего амплитудная характеристика последнего (при постоянном дифференциальном коэффициенте усиления) простирается до значений входных напряжений, значительно больших, чем в отсутствие АРУ.
Схема шумовой автоматической регулировки усиления предназначена для поддержания неизменным среднего уровня шумового напряжения на выходе приёмного устройства при значительном изменении интенсивности АШП на его входе [34]. Нормирующее действие ШАРУ достигается подачей отрицательного: смещения на каскады УПЧ, при этом рабочая точка смещается в область характеристики с малой крутизной.
Структурная схема
ШАРУ непрерывного действия представлена
на рис. 6.3а. Она состоит из регулируемого
усилителя и цепи обратной связи (цепи
ШАРУ).
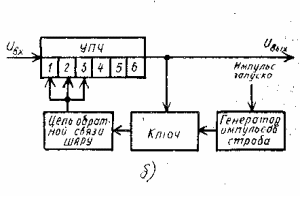
Рис. 6.3. Схема ШАРУ: а — непрерывного действия: б—ключевая
В качестве регулируемых каскадов целесообразно выбирать первые каскады УПЧ, через которые проходят сигналы сравнительно небольшого уровня. Поскольку в процессе регулирования рабочая точка смещается на нелинейный участок характеристики регулируемого каскада, то по мере увеличения числа регулируемых каскадов в последнем из них могут возникнуть большие нелинейные искажения сигнала. Для предотвращения этого ограничивают число регулируемых каскадов, а требуемый диапазон регулирования обеспечивают соответствующим увеличением диапазона регулирования на один каскад, увеличивая крутизну регулировочной характеристики.
Ориентировочно полагают, что регулировке можно подвергать каскад, в котором выполняется условие
(6.2)![]()
где σп max – максимальное среднее квадратическое значение помехи, проходящей через данный каскад;
Eg o - напряжение запирания усилительного элемента каскада.
Для выполнения условия (6.2) максимальное число регулируемых каскадов m должно быть не больше 3...4. Требуемый диапазон регулирования а1 на один каскад определяется выражением
![]()
Где Dвх , Dвых - диапазоны изменения средних квадратических значении шумовых сигналов на входе и выходе приёмного устройства.
Цепь обратной связи ШАРУ включает в себя: детектор, фильтр нижних частот (ФНЧ), буферный каскад, УПТ и пороговое устройство.
Фильтр нижних частот выделяет постоянную составляющую продетектированного шумового напряжения. В качестве ФНЧ часто применяется однозвенный RС-фильтр. Постоянная времени фильтра τфнч = RC выбирается из условия выделения среднего значения продетектированного напряжения τФНЧ = (50…100)τкор.
где τкор - время корреляции шумового напряжения на выходе детектора.
Можно считать, что τкор = 1/ПУПЧ.
Буферный каскад обеспечивает развязку ФНЧ и УПТ. Его роль, как правило, выполняет катодный либо эмиттерный повторитель. Благодаря постоянству большого входного сопротивления буферного каскада постоянная времени ФНЧ остается неизменной.
Чтобы не снижать усиление сигналов при отсутствии помех, схема ШАРУ должна вырабатывать регулирующее напряжение лишь при воздействии на её вход шумовых сигналов, превышающих номинальный уровень. Это обеспечивается с помощью порогового устройства (устройства отсечки).
Быстродействие схемы ШАРУ определяется динамической постоянной времени
(6.3)![]()
ν - крутизна регулировочной характеристики усилителя, охваченного цепью ШАРУ,
Кос - коэффициент усиления разомкнутой цепи обратной связи;
σп - среднее квадратическое значение помехи на входе регулируемого усилителя.
Из соотношения (6.3) видно, что быстродействие схемы ШАРУ не постоянно, а зависит от интенсивности помеховых сигналов.
Схема ШАРУ непрерывного действия применяется в условиях воздействия на РЛС АШП с резко выраженной нестационарностью.
В тех случаях, когда интенсивность помехи в пределах Тп изменяется несущественно (не резко выраженная нестационарность), применяется ключевая ШАРУ (рис. 6.3б). Особенность её состоит в том, что в цепь обратной связи включается ключ, управляемый генератором импульсов строба. Стробирование осуществляется с целью исключения влияния на регулирующее напряжение ШАРУ мощных отражений от местных предметов, целей, метеообразований и т. п. Ключ открывается в конце дистанции на время, примерно равное (0,2... 0,3) Ти.
Рассмотренные варианты схем ШАРУ обеспечивают регулировку усиления каскадов, предшествующих месту включения ШАРУ (осуществляют регулирование назад). Им присущи недостатки, характерные для систем автоматического регулирования с обратной связью (ограниченный запас устойчивости, зависимость быстродействия от интенсивности входных сигналов и т. д.). От этих недостатков свободны схемы ШАРУ с регулированием вперед. Они включают ЛЗ с отводами через tзад = Пи-1, детекторы, сумматор и регулируемый усилитель (рис. 6.4). На сигнальный вход последнего подается напряжение со среднего отвода ЛЗ, а на регулируемый — с выхода сумматора. Коэффициент усиления регулируемого усилителя изменяется обратно пропорционально уровню сигнала на выходе сумматора. Число отводов ЛЗ выбирается из условия получения приемлемой точности оценки интенсивности АШП на входе ШАРУ и составляет величину порядка 10... 15.

Рис. 6.4. Схема ШАРУ с регулированием вперёд
Схема ШАРУ с регулированием вперед может использоваться как для согласования динамических диапазонов элементов приемного тракта, так и в качестве нормирующего устройства.