

Глава is. Особенности построения рлс с электронным управлением лучом
15.1. ОБОБЩЕННАЯ СТРУКТУРНАЯ СХЕМА И ПРИНЦИП ДЕЙСТВИЯ РЛС С ЧАСТОТНЫМ УПРАВЛЕНИЕМ ЛУЧОМ
РЛС с частотным управлением лучом (ЧУЛ) является трех-координатной. Ее отличительная особенность—наличие специальной антенны, угловое положение луча которой определяется частотой питающих колебаний (рис. 15.1а) | 47 |.
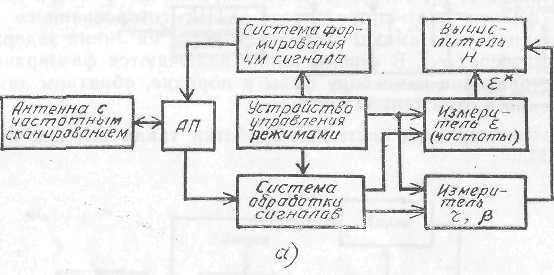

Рис. 15.1 РЛС с ЧУЛ. а - обобщенная Структурная стема; Л — частотная окраска яотты обзора по углу места
Такая антенна в простейшем случае представляет собой лилейную антенную решетку (,ПАР) с последовательным запитыванием элементов.
При подаче на вход антенны сигнала .передатчика на частоте f и\теет .место определенное соотношение фаз напряжений, питающих излучатели, и ЛАР в результате интерференции колебаний,
294
излучаемых отдельными щелями, формирует результирующую т-аграиму направленности (луч), наклоненную относительно фо-кэльаой оси на угол 8.
Ширина луча в вертикальной плоскости определяется размерами ЛАР /лар и длиной волны:
![]() (15.1)
(15.1)
При изменении несущей частоты изменяется соотношение фаз напряжений, питающих излучатели, а следовательно, и направление фронта
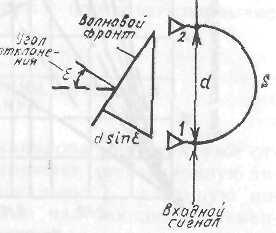
Рис. 15.2. К установлению связи углового положения антенного луча с частотой зондирующего сигнала и характеристиками Л АР
результирующей волны в верти-ка;!!,ной плоскости. Это приводит к отклонению луча по углу места. Таким образом, осуществляется так называемая частотная окраска зоны обзора но углу места (рис. !Г>.1б). Связь углового положения аптешю-го луча с частотой зондирующего
сигнала и характеристиками ЛАР
можно установит!,, используя рис. 15.2. Нетрудно показать, что
справедливо равенство
![]() (15.2)
(15.2)
где /„-in— длина волны в линии передачи, соединяющей излучатели ЛАР;
S—длина линии передачи: п — целое число. Из (15.2) следует:
![]() (15.3)
(15.3)
Это уравнение, связывающее угловое положение антенного луча и частоту, представлено графически (рис. 15.3) для различных значений п. Одним из важнейших параметром антенны РЛС с ЧУЛ является углочаетотная чувствительность Л\т, град/Гц.
Чем выше углочаетотная чувствительность, тем ниже требова-шя к диапазопности системы формирования зондирующего сигнала и системы обработки отраженных сигналов. Углочастотнуга чувствительность можно определить путем дифференцирования уравнения (15.3). Если в качестве липни передачи в ЛАР используется волновод, то
![]()
295
Ыз этого соотношения впдюэ, что для повышения углочастотной чувствительности необходима увеличивать длину 5 линии передачи, соединяющей соседние излучающие щеля или вибраторы;
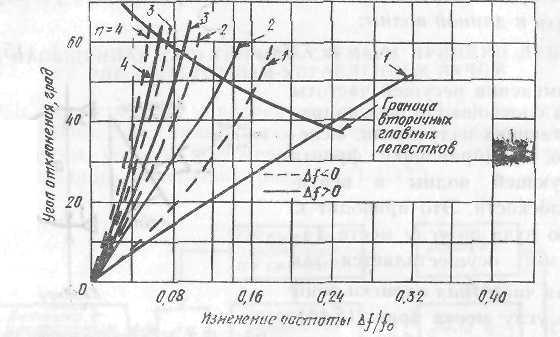
Рис. 15.3. Зависимость углового отклонения антенного луча от относительного изменения частоты зондирующего сигнала
уменьшать расстояние d между излучающими щелями или вибраторами; уменьшать относительный размер я/А широкой стенки волновода (при этом должно соблюдаться условие а >• Х/2). В случае частотно-модулированного зондирующего сигнала изменение углового положения антенного луча будет иметь место, если девиация частоты Afgga >■ sy.sp/^r. Ширина спектра сигнала, излучаемого под углом места е, при этом
![]() О
5.4) Если же Д/Мв
< во.ър/Куг, то
Д/Щ.т
(е)
= Л/лев.
О
5.4) Если же Д/Мв
< во.ър/Куг, то
Д/Щ.т
(е)
= Л/лев.
^ная величину AflLXn (е) и скорость изменения частоты в сигнале, можно определить время То^ (е), в течение которого облучается цель за одно сканирование по углу места.
Так, для линейно-частотной модуляции имеем
![]() (15.5)
(15.5)
где Гц — длительность зондирующего сигнала.
Огибающая сигнала, отраженного от цели, при этом имеет такой же вид, как и ДН антенны (по мощности) в угломестной плоскости.
В процессе механического вращения антенны по азимуту в пределах ширины луча f!o.5P, определяемой горизонтальным размером
296
антенны, на вход устройства обработки сигналов в РЛС с ЧУЛ поступает пачка модулированных но частоте импульсов с длительностью тоел (е), (в общем случае зависящей от угла места) и средней частотой, зависящей от угла места цели. Время запаздывания отраженных импульсов песет информацию о дальности, средняя несущая частота импульсов — об угле места цели, пачка отраженных импульсов в целом — об азимуте пели. Высота цели определяется путем решения уравнения высоты с помощью спецвычислителя.
15.2. ОСОБЕННОСТИ ПОСТРОЕНИЯ АНТЕННОЙ СИСТЕМЫ РЛС С ЧУЛ
Простейшая антенна с частотным сканированием, как уже отмечалось, представляет собой ЛАР и включает дисперсионную линию задержки (полноводную или коаксиальную), связанную последовательно с линейно расположенными излучающими элементами. Если линия задержки выполнена на волноводе прямоугольного сечения, то связь с излучающими элементами может производиться либо через широкую стенку волновода, либо через узкую. Для повышения углочастотной чувствительности волноводпая линия задержки изготовляется обычно изогнутой или спиральной конструкции (рис. 15.4).
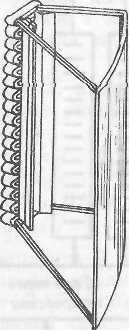
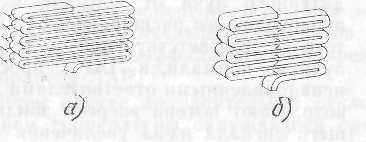
Рис. 15.4. Конструкция ЛАР: а- с виораторами, включенными в широкую стенку волновода; 6 — с щелевыми излучателями в узкой стетткс волновода
Рис. 15.5. Зеркальная антенна с частотным скаппропяписм луча
Во многих РЛС с ЧУЛ луч антенны должен иметь малую ширину v, азимутальной плоскости. Один из методов формирования узкого луча заключается в использовании цилиндрического зеркала, облучаемого .ПАР (рис. 15.5). Ширина ДН такой антенны в азимутальной плоскости определяется горизонтальным размером зеркала, а в угломестной — размером облучателя.
297
Для исключения затенения раскрыта и обусловленного йтнм увеличения уровня боковых лепестков ДМ антенны можно использовать смещение облучателя ил раскрыва антенны (см. 13.4.2). При этом зеркала антенны должно иметь несимметричное сечение в горизонтальной ПЛОСКОСТИ.
Антенны с частотным качанием луча имеют в основном такие же характеристики, как и обычные зеркальные антенны. Различия обусловлены дополнительными потерями в линии задержки, а также необходимостью иметь гораздо больший размер зеркального отражатели в вертикальной плоскости (в плоскости сканирования) для полного охвата диаграммы направленности облучателя при максимальном угле отклонения луча. Для расчета вертикального размера зеркала антенны РЛС с ЧУЛ можно использовать соотношение
![]()
где /лар — длина облучателя:
/ф — фокусное расстояние антенны, обычно 1$ = (0,3...
... 0.5) /,;'
стш, Сшах — соответственно минимальный и максимальный
утлы места зоны;
еф угол наклона фокальной оси зеркала.
Значение
Еф выбирается с учетом гого,
что: а) с увеличением отклонения антенного
луча от нормали к ЛАР происходит
его расширение; б) па частоте
/н,
соответствующей положению луча
на нормали, в ЛАР с простыми ненаправленными
ответвителями резко возрастают
потери энергии зондирующего
^сигнала из-за увеличения коэффициента
стоячей волны (отражения от
всех излучателей складываются в линии
синфазно),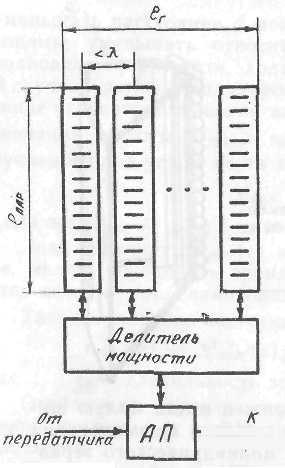
»- Рис. 15 6. Антенна с частотным екяяи-
приемпику ровашем луча с набором ЛАР
Примером простых ненаправленных ответвителей является щель в стенке волновода, которая одновременно выполняет функции элемента связи и излучателя. Для уменьшения потерь на частоте [н применяют согласованные
ненаправленные ответвители. В качестве элементов согласования могут использоваться штыри или диафрагмы.
Еще лучшие характеристики можно получить при применении в ЛАР направленных ответвителей, по при этом усложняется конструкция, увеличиваются стоимость и масса антенны.
Для уменьшения уровня боковых лепестков в угломестноЙ плоскости распределение поля вдоль ЛАР должно быть спадающим к се краям. Это обеспечивается н ЛАР с излучающими щелями выбором положения последних на стенке полповода, а в ЛАР с согласованными ненаправленными ответвителями— глубиной погружения штырей в волновод.
Второй метод формирования узкого луча в горизонтальной плоскости заключается в использовании плоских антенных решеток, представляющих собой набор ЛАР, запитываемых от одного передатчика (рис. 15.6). Такие антенны имеют меньший уровень боковых лепестков и меньшие габариты по сравнению с зеркальными. Кроме того, в подобных антеннах появляется возможность комбинированного использования фазового и частотного методов электронного сканирования антенного луча в двух взаимно перпендикулярных плоскостях (частотного сканирования — в угломестпой плоскости и фазового--в азимутальной). Недостаток плоских антенных решеток — конструктивная сложность и высокая стоимость.
В РЛС с ЧУЛ угол отклонения антенного луча помимо всего прочего зависит от температуры окружающей среды. Изменение угла отклонения луча обусловлено изменениями длины линии передачи S, размеров поперечного селения линии передачи, а также величины разноса излучающих э.тементов. Эти изменения зависят от температурного коэффициента расширения материала, из которого выполнена ЛАР.
В общем случае дополнительное отклонение луча, вызванное изменением температуры окружающей среды, можно оценить по формуле
![]() (13.0)
(13.0)
Где de/df1 — углотемпературпая чувствительность ЛАР; /° ■—исходная температура окружающей среды.
На рт»с. 15.7 приведены зависимости углотемиературной чувствительности от углового положения антенного луча для различных значений п при использовании для изготовления ЛАР алюминиевого волновода. Расчечы с использованием графиков (рис. 15.7) и формулы (15.6) показывают, что при изменении температуры окружающей среды-па 20...30° дополнительное угловое отклонение луча может достигать 0,5... 1°. Поэтому в РЛС, где требуется высокая точность определения высоты, необходима коррекция изменений угла отклонения луча в зависимости от температуры. Коррекции может осуществляться различными способами.
299
1) Коррекция с учетом измеренной температуры антенны. Температуру антенны можно измерить к учесть при определении вы--соты цели. Поправка углового положения антенного луча в утло-местной плоскости в рассматриваемом способе вычисляется по
формуле (15.6).
При
измерениях температуры,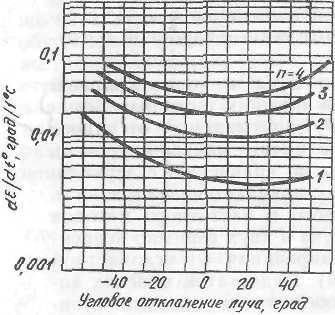
например, с помощью терморезнс-
торных элементов, укрепляемых на антенне, могут возникать ошибки, обусловленные колебаниями температуры вдоль поверхности ЛАР.
Для полкой коррекции сшибок необходимо вводить поправки второго порядка, так как dn/dt" и d&/df изменяются в зависимости от угла места.
Piic. IS.7. Зависимость углотемпе-ратурной чувсгвйтельнести антенны с частотным сканированием от углового положения антенного луча
2) Стабилизация температуры. Для получения сравнительно стабильной температуры можно ис-ЕЮльзовать специальные устройства подогрева В виде кожуха с термостабилизатором. Большие габариты устройства к необходимость затраты большой мощности па подогрев антенны ограничивают возможность использования этого способа коррекции углового положения антенного луча.
3) Компенсация температурных изменений в антенне по результатам измерения КСВ. Как уже отмечалось, в ЛАР с излуча-
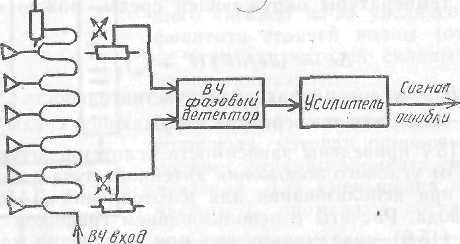
Рис. 15.8. ФазометрвчесЛая система компенсации температурных изменений
гащими щелями па частоте fhl происходит резкое увеличение КСВ.
Это .можно использовать для привязки частоты отраженного ент-нала к соответствующему углу места.
300
-
Фазовая компенсация температурных изменении. Этот спо соб обеспечивает наилучшую эффективность и точность компенса ции температурных изменений размеров ЛАР. На рис. 15.8 пред ставлена структурная схема фа.зометрической системы. Коррекцию углового положения можно осуществлять, изменяя частоту сиг нала передатчика так. чтобы получить нулевые значения сигнала на выходе фазового детектора.
-
Выбор материала для облучателя. Очевидный путь к сниже нию до минимума влияния температуры на величину угла отклоне ния луча заключается в использовании для изготовленття ЛАР мате риала с малым температурным коэффициентом расширения. На пример, при замеке алюминия сплавом нйвяра ошибки измерения угла места цели снижаются примерно в 25 раз [12]. Однако ввиду большой стоимости и массы подобных материалов возможности этого способа Ограничены.
15.3. ОСОБЕННОСТИ ПОСТРОЕНИЯ СИСТЕМ ФОРМИРОВАНИЯ ЗОНДИРУЮЩИХ. И ОБРАБОТКИ ОТРАЖЕННЫХ СИГНАЛОВ
к еле с чул
15.3.1. Система формирования зондирующих сигналов
Система формирования зондирующих сигналов rt РЛС с ЧУЛ обеспечивает формирование либо частотно-манипулироваиных, либо частотно-модулированных (чаще всего ЛЧМ) зондирующих импульсов. В первом случае при излучении сигнала происходи"! скачкообразное изменение углового положения антенного луча в пределах угломсетной зоны, а во втором - - плавное.
Девиация частоты Л/лов в пределах зондирующего импульса (или разнос несущих частот первого и последнего парциальных импульсов при частотной манипуляции) выбирается таким образом, чтобы диапазон изменения углового положения антенного луча при изменении частоты соответствовал требуемым угловым размерам зоны обзора в угломестпой плоскости. Для расчета числового значения AfmB необходимо знать зависимость в = <р (/) (см. соотношение (15.3)) или углочастотную чувствительность. В целях упрощения технической реализации системы обработки центральная частота зондирующего сигнала должна выбираться так, чтобы зависимость е = ф (/) в пределах рабочего сектора по углу места была линейной (т. е. Кут = const).
Длительность парциального импульса тЭц в частотно-манипулп-
рованном сигнале должна удовлетворять условию тг>.т ^ 5/лар> а длительность ЛЧМИ — условию ти ^ 5KyiAf;xenh.\p/^,sp, где tлAP — время прохождения сигнала (время задержки) в ЛАР. При невыполнении этих условий возникают дополнительные потери и увеличивается уровень боковых лепестков [12]. Разнос частот смежных
301
парциальных импульсов частотно-манипулироваиного сигнала определяется соотношением (15.4).
Принцип построения и особенности технических решений в сие теме формирования зондирующих сигналов в РЛС с ЧУЛ в основном такие же, как и в соответствующей системе в РЛС с ЧМ сигналами.
15.3.2. Система обработки отраженных сигналов
Система обработки отраженных сигналов в РЛС с ЧУЛ является многоканальной по частоте, что связано, главным образом, с необходимостью обнаружения сигналоп с неизвестной частотой на фоне различного рода помех в широкой полосе частот.
Многоканальность реализуется либо на промежуточной частоте, если полоса пропускания СВЧ элементов приемного |ракта превышает ширину спектра зондирующего сигнала, либо и на СВЧ — в противном случае,
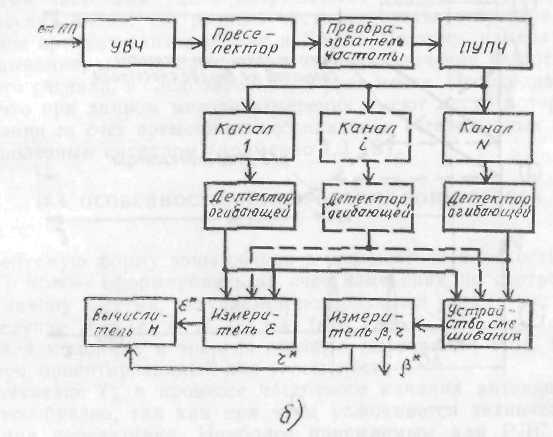
В системе обработки РЛС с частотно-манииулированным сиг налом (рис. [5.96) количество частотных каналов равно числу парциальных импульсов в зондирующем сигнале. Структура системы обработки до детекторов не отличается оп структуры системы в РЛС, рассмотренной в § 14.3.
Смешивание выходных сигналов частотных каналов перед по дачей их на измерители азимута и дальности приводит к возник новению потерь /-нш| (см. §9.10). Измеритель частоты (угла мес та) представляет собой устройство, принцип работы которого ос- нона и на сравнении амплитуд сигналов на выходах частотных ка кал ов. \
В системе обработки РЛС с ЛЧМ сигналом (ряс. (5.9а) количество частотных каналов, как и в предыдущем случае, определяется числом независимых положении антенного луча в угло-местной плоскости N = Д/>ев/Д/иал. Для сжатия отряженных сигналов длительностью тоял (15.5) для всех частотных каналов, как правило, используется общий фильтр сжатия с ХГЗ, согласованной с законом изменения частоты зондирующего сигнала длительностью Ти- Такой вариант позволяет упростить техническую реализацию по сравнению со случаем включения фильтров сжатия в каждый частотный канал, так как допускает возможность использования однотипных фильтров как в системе обработки, гак" и в системе формирования зондирующих сигналов. Необходимая при этом инверсия закона частотной модуляции внутри импульса может осуществляться либо 11 передатчице, либо в системе обработки. Длительность сжатого импульса на выходе сжимающего фильтра при А/леи > го,5г/Л\,- тож = 1/Д/иап = Л'Уг/ео,5р, т. е. однозначно опре-
302
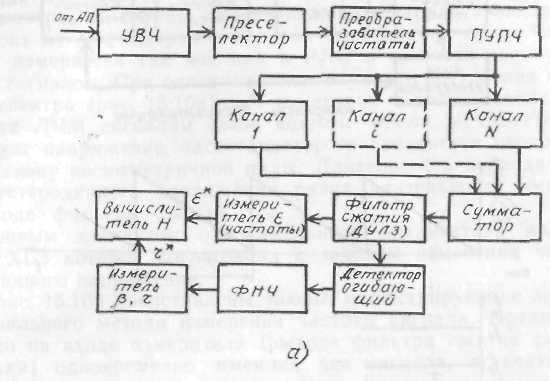
деляется параметрами частотно зависимой антенны. Корректирующий фильтр к системе обработки отсутствует, так как сто роль выполняет сама антенна.
Рис. 13.9-Структурная с sens системы обработке сигналов в Р.ЧС: л — с ЛЧМ сигналом: б —с частотно-манипилнровагшым .кодирующим сигналом
Потери, возникающие при измерении дальности к азимута нл-'я
рассогласования полосы пропускания м ширины спектра принима
... зоз
емого сигнала, в результате чего происходит суммирование шумев, приходящих из всей зоны обзора по углу места, частично компен-
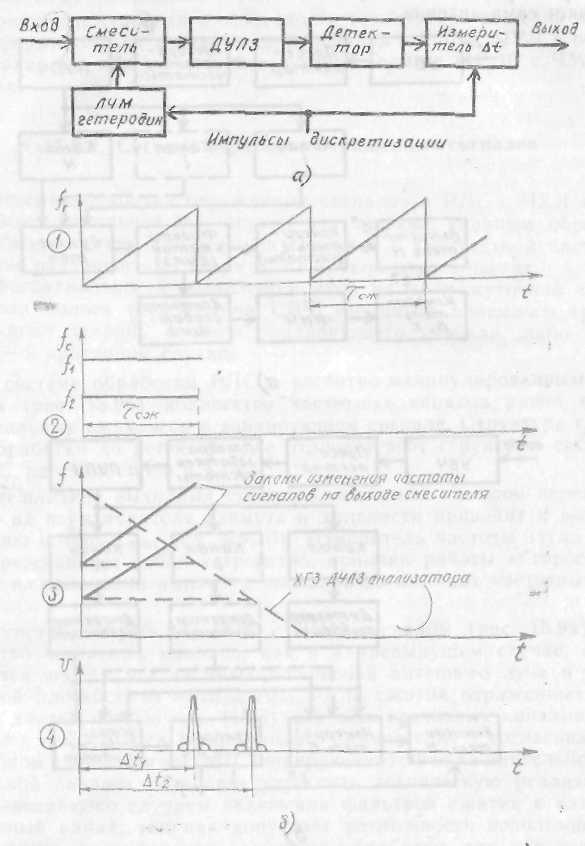
Рнс. 15.10. Оянока:ЩЛЫ1ЫЙ анализатор спектра: а—структурная схема: б — иллюстрация принципа одноканального измерения частвти
сируются путем применения последстекторного фильтра, согласованного с сигналим, имеющим длительность твж.
304
Потери A'd счет неоптимальностн полосы пропускания УПЧ в этом случае являются функцией произведения Д^евТс-ж и числа импульсов в пачке. Методика расчета потерь рассмотрена в §9.4.
Измеритель частоты (угла места) представляет собой анализатор спектра. В случае многоканального варианта построения он состоит из N фильтров с полосой пропусканий Д/лВЛ- Частота сигнала измеряется так же, как в РЛС с частотно-маннпулиро-ванным сигналом. При одтюкапалъном варианте построения анализатора спектра (рис. 15.10а) для измерения частоты используется присущая ЛЧДА. сигналам связь частота—время. ЛЧМ-гстеродип формирует напряжение, частота которого изменяется периодически по закону несимметричной пилы. Длительность периода модуляции гетеродинного напряжения равна длительности импульса на выходе фильтра сжатия т^к-
Основным элементом одноканального анализатора является ДУЛЗ, ХГЗ которой согласована с законом изменения частоты гетеродинного напряжения.
На рис. 15.106 представлены эпюры, иллюстрирующие принцип одноканального метода измерения частоты сигнала. Предполагается, что на входе измерителя (выходе фильтра сжатия системы обработки) одновременно имеются два сигнала, отличающихся средними частотами (цели разрешаются только по углу места). Из рисунка видно, что разным частотам соответствует различное значение времени запаздывания в ДУЛЗ. Поэтому, измеряя время запаздывания, можно однозначно оценить значение частоты отраженного сигнала, а следовательно, и угла места, Необходимо отметить, что при данном методе измерения имеют место потери стро-бировапия за счет временного несовпадения гетеродинных импульсов с полезным сигналом (примерно 1,3 дБ).
18.4. ОСОБЕННОСТИ ФОРМИРОВАНИЯ ЗОНЫ ОБЗОРА
i _ .., В РЛС С ЧУЛ
Требуемую фирму зоны обзора в угломестной плоскости в РЛС с ЧУЛ можно сформировать за счет изменения по соответствующему закону энергии, излучаемой под разными углами места. В общем случае -Э|!В., (в) = Ря (б) Товл (к), где Р., (г), Э„зп (е) — импульсная мощность и энергия сигнала, излучаемая РЛС в антенный луч, ориентированный под углом места е.
Изменение Р„ в процессе частотного качания антенного луча нецелесообразно, так как при этом усложняется техническая реализация передатчика. Наиболее приемлемым для РЛС с ЧУЛ является изменение длительности импульса, излучаемого в направлении того или иного угла места. Если требуется сформировать зону обзора коссканспой формы, то
![]()
То<1.7 (е) — Тобло cosec4 e/cosec4 е0, (15-7)
20. бак. 88. 305
где ко —минимальный угол места изовысотного участка зоны; Тобло — длительность импульса, излучаемого под утлом места !-о.
Сопоставляя соотношения (15.7) и (13.5), легко сделать вывод о том, что требуемый закон изменения длительности импульса можно получить за счет соответствующего выбора закона частотной модуляции зондирующего сигнала.
Трудности формирования и обработки сигналов с нелинейными законами изменения частоты ограничивают возможности формирования r РЛС с частотно-модулированным сигналом зон обзора, отличающихся по форме от изодальностной.
В РЛС с часготпо-манипулированным сигналом для формирования изовысотного участка зоны длительность парциальных импульсов должна изменяться в соответствии с соотношением (15.7).
15.3. ДОСТОИНСТВА И НЕДОСТАТКИ РЛС С ЧУЛ
Использование частотного сканирования для определения высоты целей в трехкоордннатпых РЛС даст ряд преимуществ, труднодостижимых в случае применения систем механического сканирования. К ним относятся:
высокий темп выдачи данных о трех координатах цели;
возможность управления положением антенного луча в утло-местной плоскости с целью концентрации излучаемой энергии в определенных зонах.
В РЛС с ЧУЛ одна и та же антенна может быть использована для получения зон обзора различной конфигурации за счет изменения закона виутриимпульсной частотной модуляции.
Кроме того, вследствие неподвижного характера диаграммы направленности гга прием (в вертикальной плоскости) в РЛС отсутствуют соответствующие потери сканирования, имеющие место при механическом сканировании антенны.
В качестве недостатков следует отметить сложность технической реализации некоторых устройств, например устройства формирования импульсов с нелинейной частотной молуляцней, и невозможность изменения рабочей частоты в зависимости от помехо-вой обстановки. Усложняется также конструкция антенн основного и дополнительных каналов приема (в РЛС с ЛЧМ для обеспечения идентичности ЧХ основного п дополнительных каналов приема до входов АК АШП дополнительные антенны должны быть час-тотнозавпеимыми).
306
!* 15.6.-ОСОБЕННОСТИ" ПОСТРОЕНИЯ РЛС С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ
15-6.1. Типы фазированных антенных решеток
РЛС с фазированными антенными решетками (ФАР) обладают целым рядом преимуществ перед обычными РЛС. Эти преимущества объясняются как достоинствами самих ФАР, так и широкими возможностями многоканальных (по времени и пространству) систем обработки сигналов. ФАР обеспечивает такую гибкость управления режимами работы РЛС и ее характеристиками, которая наилучшим образом отвечает требованиям конкретной-ситуации, а многоканальные системы обработки — резко повышают качество временной и пространственной селекции сигналов [31].
По виду связи с системой формирования зондирующих сигналов ФАР подразделяются па облучаемые и кондуктивные (активные ФАР) [46].
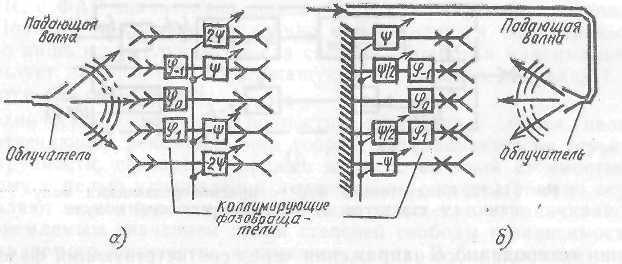
Рис. 15.11. Облучаемые ФАР: а — линзовые; б — зеркальные
■ Облучаемые ФАР выполняют роль линзы (рнс. 15.11а) или. зеркала (рис, 15.116) и по ряду показателей сходны с соответст-вующими зеркальными антеннами. Однако в отличие от последних они обеспечивают возможность электронного изменения положения антенного луча с излучением очередного зондирующего импульса путем коммутации фазовращателей. Конструктивно линзовые ФАР отличаются от зеркальных наличием двух систем излучателей (входных и выходных). Коллимирующие фазовращатели обеспечивают преобразование сферической волны облучателя в плоскую и, наоборот.
Кондуктивные ФАР — наиболее совершенный вид антенн. Они обеспечивают возможность реализации как последовательного обзора зоны одним лучом, так и одновременного обзора многими лучами. В РЛС с ФАР этого типа {рис. 15.12а) каждый элемент решетки может быть подключен к приемпо-передающему модулю
307
(ППМ), содержащему УВЧ, с месите.к., ПУПЧ. усилитель мощности н антенный переключатель (рис. 15.126). Необходимый фазовый сдвиг в сигнал, излучаемый ППМ, вводится путем проиус-
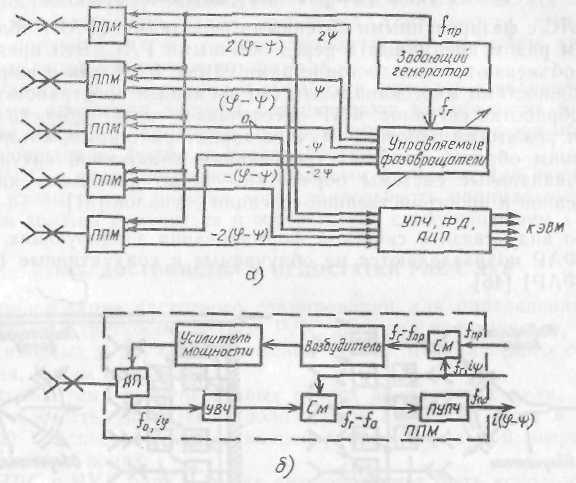
Рис. 15.12. Кондултивная ФЛР с приемопередающими модулями: а —структура; б~ приемопередающий монуль
кания гетеродинного напряжения через соответствующий фазовращатель. В качестве последних могут использоваться цифровые (дискретные) фазовращатели, состоящие из т последовательно соединенных проходных фазовращателей, каждый из которых обеспечивает фазовый сдвиг 0 или 2'-"я (к- - номер каскада). Общее число фазовых состояний такого фазовращатели равно 2"'. Значение т определяет ошибку установки антенного луча в выбранном направлении пв;ст ж 9(-)0.;|р/Л'^"'. я относительный средний квад-ратический уровень боковых лепестков результирующей диаграммы направленности ФАР ай в(,м ~ Й-2*™-0'8),
Приемлемые значения этих параметров обеспечизаются при т js= 4 ... b\
303
15.6.2. Система формирования зондирующих сигналов
В РЛС о облучаемыми ФАР передающее устройство такое же, как и в обычных РЛС. В остальных случаях система формирования зондирующих импульсов в РЛС с ФАР состоит ив задающего генератора п усилителей мощности, подключенных к излучающим элементам. Импульсная мощность сигнала, излучаемого одним элементом Р„|, должна быть равном Рял = Pa/N, где Р„— суммарная импульсная мощность сигнала, излучаемого РЛС; N— числа излучающих элементов.
Усилители мощности с целью уменьшений размеров ППМ выполняются па твердотельных элементах.
15,6.3. Система, управления и обработки отраженных сигналов
РЛС с ФАР значительно дороже РЛС с зеркальными антеннами. Поэтому применение подобных РЛС является оправданным только лишь в iex случаях, когда система обработки максимально использует информацию, содержащуюся но входных сигналах,т.е. является адаптивной [42].
Техническая реализация полностью адаптивных систем, целиком отвечающих рекомендациям теории, наталкивается на серьезные трудности, связанные, прежде всего, с высокой стоимостью. Поэтому с целью удешевления и упрощения системы обычно осу-щестпляют не полную, а частичную адаптацию, т. е. ограничиваются приемлемым значением числа степеней свободы в зависимости от ожидаемого количества источников помех. В большинстве случаев оказывается достаточным, когда число управляемых каналов не превышает 10 % от общего числа излучателей ФАР. Каждый капал при этом представляет собой канал с неадаптинной ФАР, являющейся подрешеткой всей ФАР.
Необходимость адаптации РЛС предполагает обязательное использование ЭВМ, на которые возлагаются функции:
общего управления РЛС;
обработки первичной информации:
обработки вторичной информации;
управления лучом ФАР;
подготовки информации для выдачи на оконечные устройства;
функционального контроля РЛС;
имитации целей и помех для обучения и тренировки операторов.
Для решения этих задач системы управления и обработки сигналов в РЛС с кондуктпнными ФАР имеют, как правило, три процессора:
ЭВМ обработки перничной информации;
309
центральную ЭВМ, осуществляющую обработку вторичной информации и общее управление РЛС;
ЭВМ для выработки команд управления лучом ФАР.
Алгоритмы управления и обработки сигналов в РЛС с ФАР зависят от структуры вычислительных средств. Обычно используются либо последовательный, либо последовательно-параллельный способы обработки.

Рис. 15.13. Система обработки сигналов в РЛС с ФАР
При последовательней (конвейерной) обработке — в процессоре сигналов (рис. 15.13) производится первичная обработка. Данный этап обработки характеризуется наиболее жесткими требованиями к быстродействию. В общем случае первичная обработка сводится к специальному весовому суммированию выходных сигналов под-решеток ФАР и их доплеровской фильтрации. Весовые коэффициенты могут вычисляться либо градиентным методом (с помощью корреляционных обратных связей), либо прямым методом (па основе обращения оценочной корреляционной матрицы помеховых сигналов па выходах подрешеток). Доплеровская фильтрация осуществляется на основе быстрого преобразования Фурье (см. гл. 16). Используя адекватность пространственно-временного представления сигналов, антенные лучи на прием также можно формировать па основе быстрого преобразования Фурье.
ЭВМ обработки данных служит устройством сопряжения между процессором сигналов и системой управления лучом. Центральная ЭВМ предназначена для управления работой всей РЛС и обработки данных, поступивших от устройства сопряжения. Она производит:
фильтрацию Калмана (для сопровождения маневрирующих целей);
вычисление экстраполированного положения цели; выбор режима работы РЛС.
Отличительной 'особенностью последовательно-параллельной обработки сигналов является то, что после первичной обработки данные по каждой цели обрабатываются закрепленным за ней процессором. Параллельно работающие процессоры управляются от центральной ЭВМ. Запоминающее устройство каждого процессора
310
хранит входные данные, подлежащие сглаживанию; информацию об оценке местоположения пели и ее скорости.
Параллельная организация обработки радиолокационных сигналов позволяет существенно снизить требования к быстродействию процессорен. Кроме того, повышается надежность системы, так как в случае отказа одного из процессоров он может быть заменен резервным.