

5.3. Выбор структуры зондирующего сигнала при работе рлс в условиях пассивных помех
Выбор структуры зондирующего сигнала является неотъемлемой составной частью решения задачи обеспечения помехозащищенности РЛС в условиях ПП.
Для реализации первых двух отличительных особенностей целей и ПП, перечисленных в §5.1, при работе РЛС в условиях ПП необходимо увеличивать разрешающие способности станции по угловым координатам (азимуту и углу места), дальности (вплоть до размеров цели) и скорости (частоте). Разрешающая способность РЛС по угловым координатам зависит в основном от антенной системы РЛС (при фиксированной рабочей длине волны), а возможности разрешения по дальности и скорости определяются структурой зондирующего сигнала. Поэтому при работе РЛС в условиях ПП зондирующий сигнал должен обеспечивать высокие разрешающие способности одновременно по дальности и скорости
(частоте). Наиболее полно данному требованию удовлетворяет сигнал в виде когерентной пачки узкополосных или широкополосных одиночных радиоимпульсов при условии, что длительность пачки значительно превышает временную протяженность источника ПП
![]()
где
![]() —
радиальный размер источника ПП.
—
радиальный размер источника ПП.
При
использовании в качестве зондирующего
сигнала когерентной пачки
разрешающая способность по дальности
определяется шириной
спектра одиночного импульса
![]() (длительностью
импульса на
выходе приемного тракта
(длительностью
импульса на
выходе приемного тракта![]() :
:
![]()
а разрешающая способность по частоте — длительностью пачки
![]()
Требованию
высокого разрешения одновременно по
дальности и
скорости (частоте) удовлетворяет также
одиночный шумоподобный сигнал с большой
длительностью![]() Однако
такой сигнал
по сравнению с когерентной пачкой имеет
ряд недостатков. Основными
из них являются:
Однако
такой сигнал
по сравнению с когерентной пачкой имеет
ряд недостатков. Основными
из них являются:
наличие
мешающего фона на выходе фильтра сжатия
даже в том
случае, когда цель и источник ПП находятся
в различных импульсных
объемах (интенсивность фона![]() здесь
здесь
![]() —
мощность сигнала, отраженного от
источников ПП, находящихся в импульсном
объеме РЛС, определяет предельные
возможности
системы обработки по подавлению ПП);
—
мощность сигнала, отраженного от
источников ПП, находящихся в импульсном
объеме РЛС, определяет предельные
возможности
системы обработки по подавлению ПП);
трудности осуществления развязки передающего и приемного трактов РЛС, диктующие необходимость использования раздельных антенн на прием и передачу.
Зондирующий сигнал в виде когерентной пачки также имеет недостаток — неоднозначность измерения дальности и скорости. Это видно из диаграммы неопределенности и главных сечений тела неопределенности такого сигнала (рис. 5.1). Однако в настоящее время существуют достаточно эффективные меры по ослаблению отмеченного недостатка, что и предопределяет широкое использование когерентной пачки в современных РЛС.
Следует отметить, что в общем случае зондирующий сигнал может представлять собой и некогерентную пачку, но обязательным условием является когерентность импульсов в пачке на входе устройства режекции ПП.
Когерентность импульсов в пачке обычно обеспечивается за счет истинной внутренней когерентности (РЛС излучает последовательность когерентных радиоимпульсов); эквивалентной внутренней когерентности (РЛС излучает последовательность импуль-
сов со случайными начальными фазами, которые запоминаются на время, равное периоду повторения зондирующих импульсов, и исключаются при обработке сигналов, отраженных от целей и ПП); внешней когерентности (информация о случайной начальной фазе зондирующего импульса извлекается из сигналов ПП и учитывается при обработке отраженных сигналов).
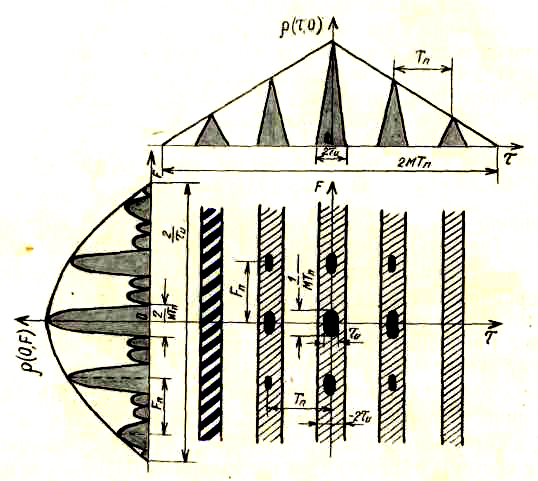
Рис. 5.1. Диаграмма неопределенности и главные сечения тела неопределенности когерентной пачки
Истинная внутренняя когерентность используется в тех случаях, когда требуется обеспечить большие значения коэффициента подавления (40дБ и более) сигналов, отраженных от местных предметов. Внешнюю когерентность целесообразно использовать при невысоких требованиях к качеству подавления сигналов ПП с целью упрощения технической реализации аппаратуры защиты от ПП и снижения ее стоимости.