

16.7,3. Особенности технической реализаций
цифровых гребенчатых фильтров подавления,
осуществляющих обработку в частотной области
В ряде случаев бывает целесообразным обрабатывать сигналы а частотной области. Это связано, во-первых, с облегчением зада-чи синтеза ЦГФП с заданными частотными характеристиками (поскольку сигналы в каждом частотном канале обрабатываются независимо друг от друга) и, во-вторых, с упрощенней технической реализации фильтров. Для перехода в частотную область используется дискретное преобразопание Фурье (ДПФ). Для конечного числа N выборок входного сигнала х («) оно определя-
N I
ется соотношением S (к) = JЈ х (п) ехР ( ~]2tinfc/N), k = О, ./V — 1,
где S (k) — комплексная составляющая спектра па fi-fi частоте. В общем случае X (п) = х, (я) +/хг (я) (здесь: xt (n) и Хг ("} — соответственно вещественная и мнимая" часты сигнала X («)). Поэтому, обозначая 2tt/N = Дф и учитывая, что e-J'" = = cos а — /SMia, алгоритм ДПФ можно представит], в виде

JV -1
S {k) — ^ [Х\ (п) cos ak&tp + xs («) S|n пМф] —
лг-i
JBTh (") совлАДф — ху (л) Bin»Mq)]*= 5, (А) +/53 (А). (16.20)
(16.20)
Модульное значение k-к спектральной составляющей
![]()
$(k)\ =ySi(k) +5j(AJ. (16.21)
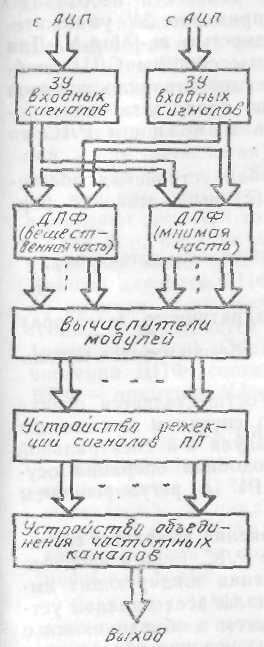
Соотношения (16.20), (16.21) определяют алгоритм работы устройства, обеспечивающего ДПФ входных сигналов в ЦГФП (рис. 16.25).
Рассмотрим особенности технической реализации фильтра подобного типа.
Организация ЗУ входных сигналов зависит от быстродействия АУ, осуществляющего операции ДПФ. Если АУ способно обеспечить вычисление Si (к) и S2 (к) за период дискретизации Тя, то ЗУ входных сигналов по принципу построения аналогично ЗУ, рассмотренному в 16.7.2. Емкость ЗУ при этом составляет 2TaFa (Jv — 1) m бит. Если же быстродействие АУ недостаточно, то операции по вычислению S, (к) и S2 (*) выполняются последовательно и необходимость в ЗУ входных сигналов отпадает (их роль выполняют буферные регистры, запоминающие коды выборки входного сигнала на время Тя).
Устройство, осуществляющее ДПФ, может быть реализовано либо на микропроцессорах, либо на типовых элементах дискрет-
342
fa =is»tt5Se=S^
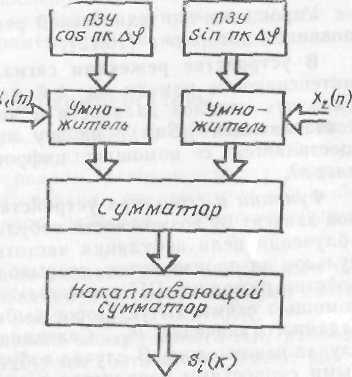
,iu» канала дальности. Наш по соображениям стоимости II аппаратурных затрат параллельный способ вычисления ДПФ реализовать невозможно, производится последовательное выполнение операций ДПФ но мере поступления выборок входных сигналов. Устройство, вычисляющее Si (А), в этим случае строится на основе умножителей и накапливающих сумматоров (рис. 16.26). В ТШ хранятся значения cos пк\ц> и SU1 ляйф-Исходное состояние регистра памяти на /„ — нулевое. После поступления на вход устройства первой сигнальной выборки
Рис. 16.26. Устройство вычисления Si (ft)
Рис. 16.25- Цифровой гребенчатый фильтр подавления, осуществляющий обработку сиг-на.-.on в частотной области
Процесс вычисления S, {к) заканчивается после по">™'™ на вход устройства Л'-Й сигнальной выборки, после чего регистр
X,
(0) и х2
(0) в регистре памяти
запоминается на
Та
число, рав-ям
i,(0)cis(0)+ft(0)staO-*,(0).
После поступления
второй
выборки
на один .ход накапливающего сумматора
поступает 1-.Г0) из
регистра памяти, а на
второй х, (1)
cos
kA<f
+ + k(l)s!n*A<P
и в регистре запомннвется
число, равное![]()
устанавливается в нулевое состояние и начинается процесс вычисления Si (k) для следующих N выборок. Для реализации устройства, осуществляющего ДПФ, в канале дальности необходимо иметь: 2N накапливающих сумматоров, примерно 3jV умножителей и 27"n/\,;V регистров памяти с разрядностью т. -+- logaiV. Для обеспечения высокой эффективности работы системы СДЦ необходимо, чтобы число импульсов в пачке удовлетворяло условию М 5" (3 ...4) N, В противном случае можно пропустить пачку полезных импульсов и существенно снизить возможности РЛС по селекции малоподвижных целей.
Вычислитель модулей представляет co6oii устройство, обеспечивающее для каждой пары S\ (k) n Sj (k) вычисление по формулам
![]() (аналог
линейного детектора); либо
(аналог
линейного детектора); либо
![]() (аналог
квадратичного детектора).
(аналог
квадратичного детектора).
Упрощение его технической реализации обеспечивается использованием алгоритма (16.12).
В устройстве режекции сигналов П П осуществляется опенка интенсивности помехи на k-й частоте по сигналам нескольких смежных каналов дальности и деление модуля k-и спектральной составляющей | S (k) | на эту оценку. Подобная операция осуществляется с помощью цифровой ШАРУ с регулированием вперед.
Функции и структура устройства объединения выходных сигналов зависят от возможности вобуляции Гп в РЛС. Если в процессе облучения цели вобуляция частоты повторения зондирующих импульсов не производится, то выходные сигналы всех каналов устройства режекции ПП сравниваются с порогом и объединяются с помощью схемы ИЛИ. Порог выбирается из условия обеспечения заданного значения Рт- Селекция малоподвижных целей в этом случае невозможна. В случае вобуляции Fa помимо борьбы со слепыми скоростями появляется возможность селекции малоподвижных целей. Принцип селекции основан на том, что в случае малоподвижной цели изменение частоты повторения не приводит к существенному изменению частоты пульсаций сигналов на выходе ФД. Поэтому сигнал от такой цели будет находиться в одном и том же частотном канале в отличие от сигнала, отраженного от скоростной цели.
Предельное значение коэффициента подавления ПП в системах СДЦ на основе ДПФ можно оценить по формулам, приведенным в §5.11. Для повышения Хпп целесообразно осуществлять предварительное взвешивание пачки из N импульсов [12, 43, 50,
344
54]. В случае больших /V устройство ДПФ цифрового фильтра должно строиться па основе быстрого преобразования Фурье (БПФ}.
БПФ представляет юбой алгоритм, позволяющий (при параллельной обработке) резко сократить время вычисления ДПФ. Основная идея БПФ состоит в том, что исходная /V-точечная последовательность разбивается на две более короткие. При четном N она разбивается па две /V/2-точечные последовательности, Для вычисления ДПФ каждой из них потребуется {N/2 — 1)й умножений, а для вычисления ДПФ исходной последовательности — примерно 2 (/V/2)a= Лга/2 комплексных умножений, т. с. вдвое меньше, чем при прямом вычислении. Эту операцию повторяют, т. е. вычисляют два N /4-точечных ДПФ вместо одного -V/2-точечного до тех пор, пока не дойдут до двухточечных ДПФ. На каждом этапе разбиения объем вычислений сокращается примерно вдвое. Данный алгоритм БПФ называется алгоритмом с прореживанием по времени, поскольку на каждом этапе временная последовательность разделяется на две последовательности меньшей длины (прореживается). Общее число операции при прямом способе вычислений ДПФ составляет примерно Л**2, а при использовании БПФ — примерно N |og2<V.