

11.3. Сравнение способов обзора зоны обнаружения при наличии потерь
Потери, обусловленные обзором. В реальных условиях при сопоставлении способов обзора помимо всего прочего необходимо учитывать потери, связанные с особенностями способа обзора. От способа обзора зависят потери:
в антенне (Lант);
за счет некогерентного накопления отраженных импульсов Lи нн;
обусловленные накоплением дополнительного шума (Lиш);
за счет непрямоугольной формы диаграмм направленности приёмной и передающей антенн (Lфд);
сканирования (Lск).
Последние два вида потерь свойственны только РЛС обнаружения. Поэтому в последующем произведение коэффициентов потерь Lфд Lск будем называть потерями обзора и обозначать символом Lобз.
Потери в антенне. В случае изодальностной зоны обнаружения потери в антенне при реализации второго и четвертого способов обзора несколько выше, чем при первом и третьем способах.
Это объясняется тем, что для формирования диаграммы веерного типа большую часть облучателей необходимо смещать с фокальной оси антенны. При этом коэффициент эффективности приёмной антенны уменьшается.
В случае изовысотной зоны обнаружения наибольшие потери в антенне возникают при реализации первого способа обзора (Lант = 4,..5 дБ).
Потери за счет некогерентного накопления. Величина этих потерь зависит, как уже отмечалось, от числа импульсов в пачке Lи нн = f (M). Чем больше число импульсов в пачке, тем больше коэффициент потерь Lи нн, и наоборот.
Наименьшее число импульсов в пачке имеет место при третьем способе обзора, поскольку при этом скорость перемещения антенного луча самая большая. Для остальных способов обзора число импульсов в пачке одинаковое. Поэтому
![]()
Потери, обусловленные накоплением дополнительного шума.
При реализации второго и четвертого способов обзора помимо других потерь появляются потери, обусловленные накоплением дополнительного шума при смешивании выходных сигналов парциальных каналов приёма. В случае первого и третьего способов Обзора эти потери отсутствуют.
Потери, обусловленные не прямоугольностью формы диаграммы направленности. При выводе уравнения радиолокации для РЛС, работающей в режиме обзора, предполагалось, что диаграмма направленности имеет в поперечном сечении прямоугольную форму с одинаковым коэффициентом усиления по всему сечению. В реальных же РЛС форма диаграммы направленности антенны отличается от прямоугольной. В связи с этим отражённые от цели сигналы оказываются промодулированными по амплитуде по закону, соответствующему двусторонней (на передачу и приём) форме диаграммы направленности антенны. Потери Lфд, обусловленные формой диаграммы направленности, определяют ту добавочную энергию сигнала, которая необходима для компенсации уменьшения амплитуд принимаемых импульсов, когда ось диаграммы направленности смещается относительно направления на цель. Величина этих потерь зависит от способа обзора пространства.
Можно показать, что при сканировании антенного луча в одной плоскости и числе импульсов в пачке, превышающем 6, величина потерь Lфд составляет 1,6 дБ. Эта величина, остается постоянной при изменении в широких пределах значений отношения сигнал—шум и вероятности ложной тревоги.
В тех случаях, когда антенный луч сканирует в двух плоскостях, потери Lфд удваиваются и составляют 3,2 дБ.
Потери сканирования.
При очень быстром сканировании антенный
луч успевает сместиться на заметный
угол за время между излучением зондирующего
и приемом отраженного импульсов. Это
может привести, во-первых, к уменьшению
амплитуды импульсов пачки и, во-вторых,
к потере части отраженных импульсов,
соответствующих концу пачки, поскольку
к моменту их прихода основной лепесток
диаграммы направленности антенны
будет отвёрнут от направления на цель.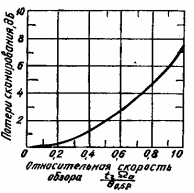
Рис. 11.3. Зависимость потерь сканирования от относительной скорости обзора зоны
Зависимость
коэффициента потерь сканирования Lск
от величины относительного смещения
антенного луча за время запаздывания
отраженного сигнала tr
приведена на рис. 11.3. Видоизменим запись
выражения, определяющего относительное
смешение антенного луча за время tr.
Используем для этого соотношение
где tобл
— время облучения цели; Ωа
— угловая скорость сканирования антенны.
С учетом записанного соотношения
.![]()
![]()
Последнее соотношение и график, представленный на рис. 11.3, позволяют сделать следующие выводы:
потери сканирования уменьшаются при увеличении числа импульсов в пачке и при М > 6 практически отсутствуют при любой дальности до цели (в пределах зоны обнаружения);
при уменьшении дальности до цели потери сканирования при всех прочих равных условиях уменьшаются.
Смещая приёмную диаграмму направленности относительно излучающей на величину, достаточную для компенсации поворота антенны за время запаздывания отраженного сигнала, можно уменьшить потери сканирования для целей, находящихся на соответствующей дальности. Однако усложнение Конструкции антенной системы РЛС не способствует практической реализации такого метода уменьшения потерь сканирования, особенно, когда известно, что при очень высоких скоростях обзора существенно увеличиваются и другие потери, связанные с работой станции в режиме обзора.