

CHAPTER 5
STACK OVERFLOW MODULE
The stack overflow module monitors the value of the stack pointer (SP) and generates a nonmaskable interrupt request if the value is outside the boundaries you specify. This module helps to ensure data integrity. Without the stack overflow module, the stack could grow too large and corrupt other data, causing a fatal system error.
5.1FUNCTIONAL OVERVIEW
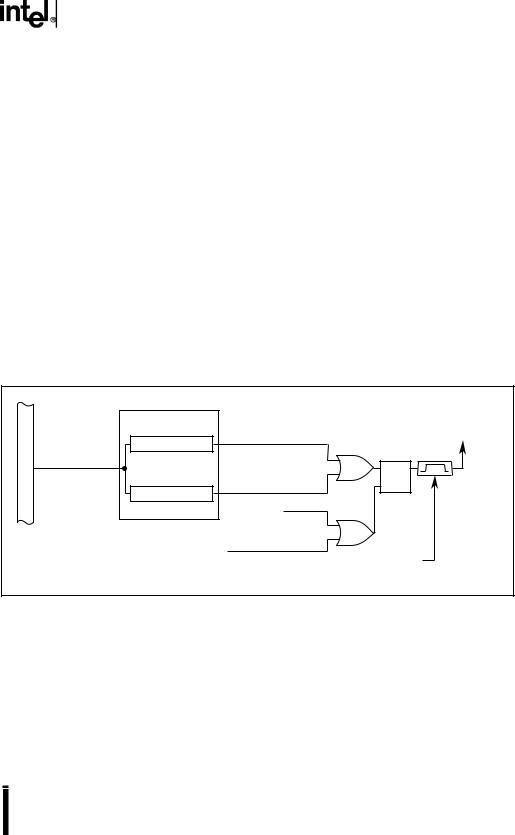
The stack overflow module (Figure 5-1) decodes the stack pointer addresses (0018–0019H) from the peripheral address bus. The comparator compares that value to the boundaries you specify. A stack pointer value that is equal to or outside the boundaries sets the R/S flip-flop, which in turn sets the nonmaskable interrupt pending bit.
The R/S flip-flop can be set only once, and only a reset or another write operation to the STACK_TOP register can clear it. Your initialization code and your interrupt service routine for the stack overflow error must write to the STACK_TOP register to enable the stack overflow module.
Bus |
Comparator |
|
|
|
SP ³ STACK_TOP |
|
Set INT_PEND1.6 |
||
Address |
|
|||
STACK_TOP |
|
|
||
Stack Pointer (SP) |
S |
Q |
||
|
||||
Peripheral |
0018–0019H |
|||
|
|
|||
SP £ STACK_BOTTOM |
R Q# |
|||
STACK_BOTTOM |
|
|
||
Reset |
|
|
||
|
|
|
||
|
Write to STACK_TOP |
|
|
|
|
|
One-shot |
||
|
|
pulse generator |
||
|
|
|
A3313-01 |
|
Figure 5-1. Stack Overflow Module Block Diagram
5.2STACK OPERATIONS
The stack is a last-in-first-out (LIFO) register used to keep track of program addresses and the processor status word (PSW), as well as to pass parameters from one routine to another. You control the location of the stack by initializing the stack pointer (SP) with an address that is two bytes (for 64-Kbyte mode) or four bytes (for 2-Mbyte mode) greater than the starting address (top) of the stack. The stack grows downward as entries are added (PUSHed onto the stack) and shrinks upward as entries are unloaded (POPped off the stack). The stack must be located in page 00H, and is most efficient when located in the upper register file.
5-1

8XC196EA USER’S MANUAL
When the CPU encounters a subroutine call or interrupt service routine, it manipulates the stack pointer (SP), the stack, and the program counter (PC) as shown in Table 5-1.
Table 5-1. Effect of Subroutine Execution on the Stack, SP, and PC
Instruction |
Operation |
BR, CALL, JUMP |
SP ← (SP–2) in 64-Kbyte mode or (SP–4) in 2-Mbyte mode) |
|
Stack ← PC (next instruction address) |
|
PC ← address of subroutine or interrupt service routine |
…Execute subroutine or interrupt service routine
RET |
PC ← next instruction address (from top of stack) |
|
SP ← (SP+2) in 64-Kbyte mode or (SP+4) in 2-Mbyte mode) |
5.3STACK OVERFLOW MODULE REGISTERS
Table 5-2 describes the registers associated with the stack overflow module.
Table 5-2. Stack Overflow Module Control and Status Registers
Mnemonic |
Address |
Description |
|
|
|
INT_MASK1 |
0013H |
Interrupt Mask 1 |
|
|
The stack overflow interrupt is always enabled. The nonfunctional |
|
|
STACK mask bit in INT_MASK1 exists for design symmetry with the |
|
|
INT_PEND1 register. Write zero to the STACK bit or leave it in its |
|
|
default state. |
|
|
|
INT_PEND1 |
0012H |
Interrupt Pending 1 |
|
|
The STACK bit in this register, when set, indicates that a stack |
|
|
overflow interrupt is pending. |
|
|
|
SP |
0018H |
Stack Pointer |
|
|
Initialize the stack pointer to an address that is two bytes (in 64-Kbyte |
|
|
mode) or four bytes (in 2-Mbyte mode) greater than the desired |
|
|
starting address (top) of the stack. Ensure that this value is within the |
|
|
boundaries you specify in STACK_BOTTOM and STACK_TOP. |
|
|
|
STACK_BOTTOM |
1FA0H |
Lower Stack Limit |
|
|
Write the boundary address for the bottom of the stack to this |
|
|
register. A stack pointer value that is equal to or less than this |
|
|
address will set the stack overflow interrupt pending bit in |
|
|
INT_PEND1. |
|
|
|
STACK_TOP |
1FA2H |
Upper Stack Limit |
|
|
You must write to this register to enable the stack overflow module |
|
|
after a reset and after a stack overflow. Write the boundary address |
|
|
for the top of the stack to this register. A stack pointer value that is |
|
|
equal to or greater than this address will set the stack overflow |
|
|
interrupt pending bit in INT_PEND1. |
|
|
|
5-2