


8XC196EA USER’S MANUAL
Table 6-8. Single Transfer Mode PTSCB
Unused
Unused
PTSDST (H) = 60H
PTSDST (L) = 00H
PTSSRC (H) = 00H
PTSSRC (L) = 20H
PTSCON = A5H (Mode = 101, BW = 0, SI/SU = 0, DI/DU = 1)
PTSCOUNT = 09H
6.6.4Block Transfer Mode
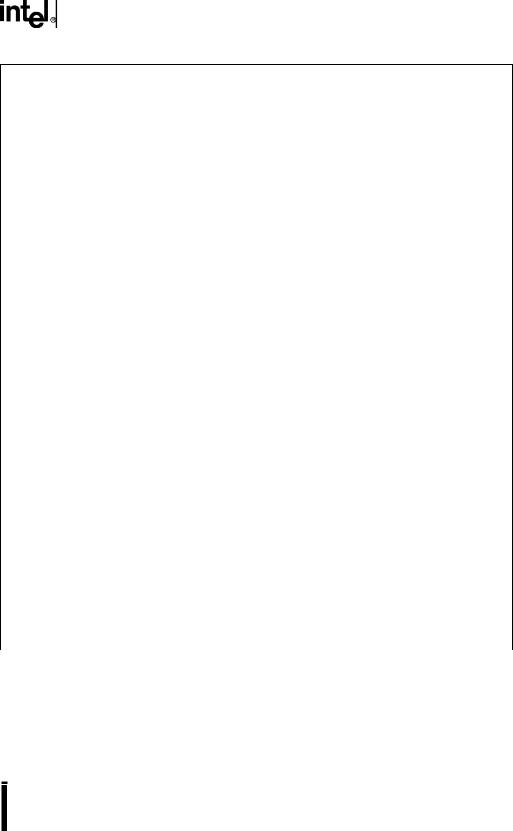
In block transfer mode, an interrupt causes the PTS to move a block of bytes or words from one memory location to another. See AP-445, 8XC196KR Peripherals: A User’s Point of View , for application examples with code. Figure 6-25 shows the PTS control block for block transfer mode.
In this mode, each PTS cycle consists of the transfer of an entire block of bytes or words. Because a PTS cycle cannot be interrupted, the block transfer mode can create long interrupt latency. The worst-case latency could be as high as 500 states if you assume a block transfer of 32 words from one external memory location to another, using an 8-bit bus with no wait states. See Table 6-6 on page 6-18 for execution times of PTS cycles.
The PTSCB in Table 6-9 sets up three PTS cycles that will transfer five bytes from memory locations 20–24H to 6000–6004H (cycle 1), 6005–6009H (cycle 2), and 600A–600EH (cycle 3). The source and destination are incremented after each byte transfer, but the original source address is reloaded into PTSSRC at the end of each block-transfer cycle. In this routine, the PTS always gets the first byte from location 20H.
Table 6-9. Block Transfer Mode PTSCB
Unused
PTSBLOCK = 05H
PTSDST (H) = 60H
PTSDST (L) = 00H
PTSSRC (H) = 00H
PTSSRC (L) = 20H
PTSCON = 37H (Mode = 001; DI, SI, DU, BW = 1; SU = 0)
PTSCOUNT = 03H
6-38
STANDARD AND PTS INTERRUPTS
PTS Block Transfer Mode Control Block
In block transfer mode, the PTS control block contains a block size (PTSBLOCK), a source and destination address (PTSSRC and PTSDST), a control register (PTSCON), and a transfer count (PTSCOUNT).
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
Unused |
|
0 |
0 |
0 |
|
0 |
|
0 |
0 |
|
0 |
0 |
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
|
PTSBLOCK |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PTS Block Size |
|
|
|
|
|
|||
|
|
|
15 |
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSDST (H) |
|
|
|
PTS Destination Address (high byte) |
|
|
|
||||||
|
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
|
PTSDST (L) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PTS Destination Address (low byte) |
|
|
|
|||||||
|
|
|
15 |
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSSRC (H) |
|
|
|
|
PTS Source Address (high byte) |
|
|
|
|||||
|
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSSRC (L) |
|
|
|
|
PTS Source Address (low byte) |
|
|
|
|||||
|
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
|
PTSCON |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 |
M1 |
M0 |
|
BW |
|
SU |
DU |
|
SI |
DI |
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSCOUNT |
|
|
|
|
Consecutive Block Transfers |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Register |
Location |
|
|
|
|
|
Function |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
PTSBLOCK |
PTSCB + 6 |
PTS Block Size |
|
|
|
|
|
|
|
||||
|
|
|
|
Specifies the number of bytes or words in each block. Valid values are |
|
|||||||||
|
|
|
|
1–32, inclusive. |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
|
PTSDST |
PTSCB + 4 |
PTS Destination Address |
|
|
|
|
|
|
|
||||
|
|
|
|
Write the destination memory location to this register. A valid address is |
|
|||||||||
|
|
|
|
any unreserved memory location within page 00H; however, it must |
|
|||||||||
|
|
|
|
point to an even address if word transfers are selected. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
PTSSRC |
PTSCB + 2 |
PTS Source Address |
|
|
|
|
|
|
|
||||
|
|
|
|
Write the source memory location to this register. A valid address is any |
|
|||||||||
|
|
|
|
unreserved memory location within page 00H; however, it must point to |
|
|||||||||
|
|
|
|
an even address if word transfers are selected. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
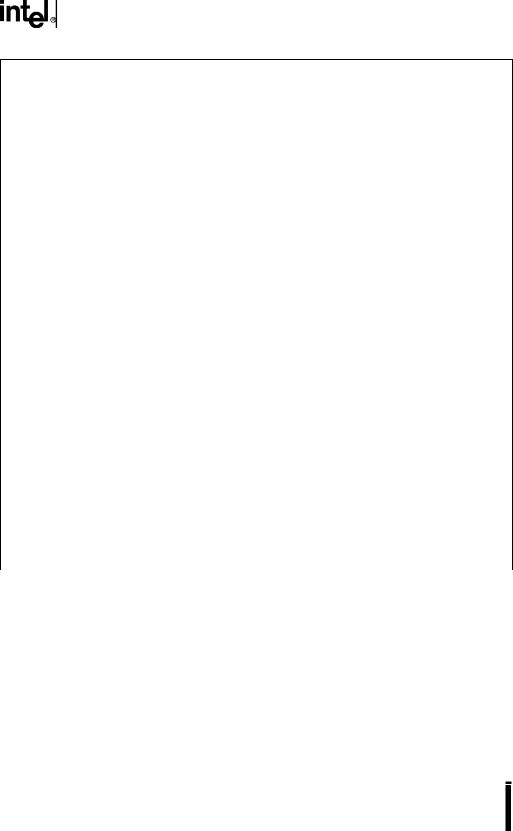
Figure 6-25. PTS Control Block — Block Transfer Mode
6-39
8XC196EA USER’S MANUAL
PTS Block Transfer Mode Control Block (Continued)
|
Register |
Location |
|
|
|
|
|
Function |
|
|
|
|
|
|
|
|
|||
|
PTSCON |
PTSCB + 1 |
PTS Control Bits |
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
M2:0 |
PTS Mode |
|
|
|
||
|
|
|
|
These bits select the PTS mode: |
|
||||
|
|
|
|
M2 |
M1 |
M0 |
|
|
|
|
|
|
|
0 |
|
0 |
1 |
block transfer mode |
|
|
|
|
|
|
|
|
|||
|
|
|
BW |
Byte/Word Transfer |
|
|
|||
|
|
|
|
0 |
= word transfer |
|
|
||
|
|
|
|
1 |
= byte transfer |
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
SU |
Update PTSSRC |
|
|
|||
|
|
|
|
0 |
= |
reload original PTS source address after each block |
|
||
|
|
|
|
|
|
transfer is complete |
|
||
|
|
|
|
1 |
= |
retain current PTS source address after each block transfer |
|
||
|
|
|
|
|
|
is complete |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
DU |
Update PTSDST |
|
|
|||
|
|
|
|
0 |
= |
reload original PTS destination address after each block |
|
||
|
|
|
|
|
|
transfer is complete |
|
||
|
|
|
|
1 |
= |
retain current PTS destination address after each block |
|
||
|
|
|
|
|
|
transfer is complete |
|
||
|
|
|
|
|
|
||||
|
|
|
SI |
PTSSRC Autoincrement |
|
||||
|
|
|
|
0 |
= |
the contents of PTSSRC are not incremented after each |
|
||
|
|
|
|
|
|
byte or word transfer |
|
||
|
|
|
|
1 |
= |
the contents of PTSSRC are incremented after each byte |
|
||
|
|
|
|
|
|
or word transfer |
|
|
|
|
|
|
|
|
|
||||
|
|
|
DI |
PTSDST Autoincrement |
|
||||
|
|
|
|
0 |
= |
the contents of PTSDST are not incremented after each |
|
||
|
|
|
|
|
|
byte or word transfer |
|
||
|
|
|
|
1 |
= |
the contents of PTSDST are incremented after each byte or |
|
||
|
|
|
|
|
|
word transfer |
|
|
|
|
|
|
|
|
|
|
|||
|
PTSCOUNT |
PTSCB + 0 |
Consecutive Block Transfers |
|
|
||||
|
|
|
Defines the number of blocks that will be transferred during the block |
|
|||||
|
|
|
transfer routine. Each block transfer is one PTS cycle. Maximum number |
|
|||||
|
|
|
is 255. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
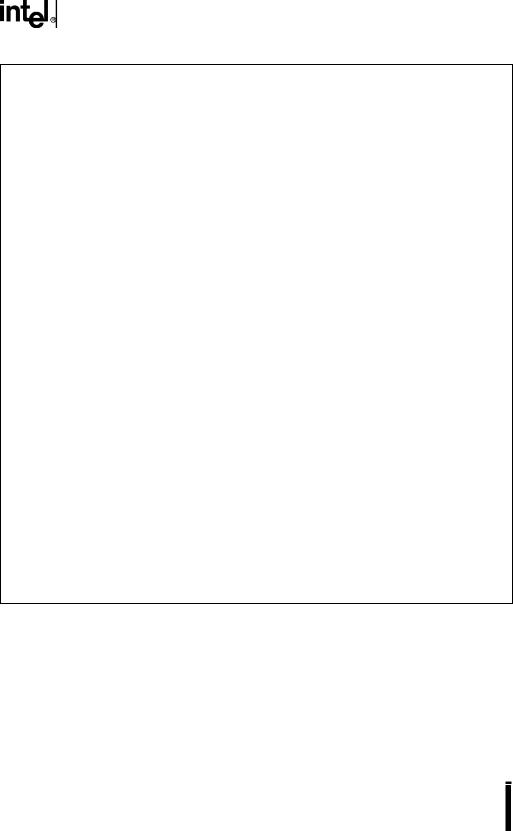
Figure 6-25. PTS Control Block — Block Transfer Mode (Continued)
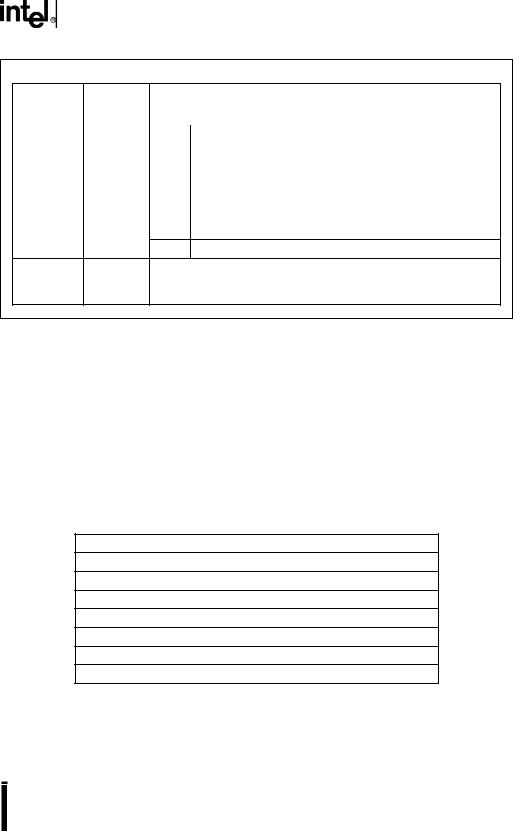
6.6.5Dummy Mode
The PTS dummy mode protects against situations where software manually clears the pending bits in the PIHx_PEND register before clearing the PIHx_PTS interrupt pending bit in the INT_PEND1 register. In this situation, the CPU may attempt to service the interrupt request after it is no longer valid. If this occurs, the PIH responds with the dummy PTS request vector address (2016H). The PTS aborts service when it reads the PTSCB and determines that the PTS dummy mode is selected. Write 0000H to location FF2016H so that the dummy PTS routine vectors to the zero-register and no register RAM locations are wasted. Figure 6-26 shows the PTS control block for dummy mode.
6-40
STANDARD AND PTS INTERRUPTS
PTS Dummy Mode Control Block
In dummy mode, the PTS control block contains only a control register (PTSCON). All other PTSCB bytes can be used as extra RAM.
|
7 |
|
|
|
|
|
|
|
|
|
|
0 |
|
PTSCON |
|
M2 |
M1 |
M0 |
|
|
0 |
|
0 |
|
0 |
0 |
0 |
|
|
7 |
|
|
|
|
|
|
|
|
|
|
0 |
Unused |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|
|
0 |
|
0 |
|
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Register |
Location |
|
|
|
|
|
|
Function |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
Register |
Location |
|
|
|
|
|
|
Function |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
PTSCON |
PTSCB + 1 |
PTS Control Bits |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2:0 |
PTS Mode |
|
|
|
|
|
|
|
||
|
|
|
|
These bits select the PTS mode: |
|
|
|
||||||
|
|
|
|
M2 |
M1 |
M0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
0 |
dummy mode |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Figure 6-26. PTS Control Block — Dummy Mode
6.6.6Missed-Event Mode
In missed-event mode, the PTS uses a pair of event processor array (EPA) capture/compare channels to generate an interrupt if an input pulse fails to occur within a predictable period of time (Figure 6-27). The PTS monitors a series of regular input pulses on the EPA channel and calculates when the next pulse should occur based upon the time of the last two pulses. It stores the calculated value into the event-time register (EPAx_TIME) of a second EPA channel. The second EPA channel compares the timer value to the contents of EPAx_TIME. If the next pulse does not occur before the two values are equal, an interrupt occurs. Figure 6-28 shows the PTS control block for missed-event mode.
Missing Pulse(s) |
A4295-01 |
Figure 6-27. An Example of a Missed Event
6-41
8XC196EA USER’S MANUAL
PTS Missed-event Mode Control Block
In missed-event mode, the PTS control block contains a pointer to the current event-time (PTSCUR), a pointer to the previous event-time (PTSPREV), a control register (PTSCON), and a maximum count register (PTSCOUNT).
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
Unused |
|
0 |
0 |
0 |
0 |
|
|
0 |
0 |
|
0 |
0 |
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
Unused |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
|
|
0 |
0 |
|
0 |
0 |
||
|
|
|
15 |
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSPREV (H) |
|
|
|
Pointer to Previous Event Time (high byte) |
|
|
|||||||
|
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
PTSPREV (L) |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Pointer to Previous Event Time (low byte) |
|
|
||||||||
|
|
|
15 |
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSCUR (H) |
|
|
|
Pointer to Current Event Time (high byte) |
|
|
|||||||
|
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSCUR (L) |
|
|
|
Pointer to Current Event Time (low byte) |
|
|
|||||||
|
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
PTSCON |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 |
M1 |
M0 |
BW |
|
|
0 |
0 |
|
0 |
0 |
||
|
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSCOUNT |
|
|
|
|
Maximum Count |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Register |
|
Location |
|
|
|
|
|
Function |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
PTSPREV |
|
PTSCB + 4 |
Pointer to Previous Event Time |
|
|
|
|
|
|||||
|
|
|
|
This register points to the memory location where the PTS stores the |
|||||||||
|
|
|
|
time of the previous event. A valid address is any unreserved memory |
|||||||||
|
|
|
|
location within page 00H; however, it must point to an even address if |
|||||||||
|
|
|
|
word event times are selected. |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||
PTSCUR |
|
PTSCB + 2 |
Pointer to Current Event Time |
|
|
|
|
|
|||||
|
|
|
|
This register points to the event-time register (EPAx_TIME) for the EPA |
|||||||||
|
|
|
|
channel that is capturing the input pulse signal. |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Figure 6-28. PTS Control Block — Missed-event Mode
6-42
STANDARD AND PTS INTERRUPTS
PTS Missed-event Mode Control Block (Continued)
Register |
Location |
|
|
|
Function |
|
|
|
|
|
|
||
PTSCON |
PTSCB + 1 PTS Control Bits |
|
|
|||
|
|
|
|
|
|
|
|
|
M2:0 |
PTS Mode |
|
|
|
|
|
|
These bits select the PTS mode: |
|||
|
|
|
M2 |
M1 |
M0 |
|
|
|
|
1 |
1 |
0 |
missed-event mode |
|
|
|
|
|||
|
|
BW |
Byte/Word Event-time Value |
|||
0 = word
1 = byte
4:0 To guarantee proper device operation, write zeros to these bits.
PTSCOUNT PTSCB + 0 Maximum Count
Defines the number of times the PTS will check for the occurrence of an event. Each comparison is one PTS cycle. Maximum number is 255.
Figure 6-28. PTS Control Block — Missed-event Mode (Continued)
To use the missed-event mode, configure one event processor array (EPA) channel to capture events and a second EPA channel to monitor a timer/counter and compare its value with the expected next event time. For example, configure EPA1 as the input capture channel and EPA0 as the compare-only channel.
Configure EPA1 to select timer 1, capture on rising edge, select associated pin for input, reset timer 1, old data lost on overrun, no module concantenation (EPA1_CON = 0000 0010 X0X0 0010).
Configure EPA0 to select timer 1, compare mode, interrupt only, no action (EPA0_CON = 0000 0100 0000 0000).
Initialize the PTSCB as shown in Table 6-10.
Table 6-10. Missed-event Mode PTSCBs
0000H (Unused)
0000H (Unused)
PTSPREV (H) = xxH (any unreserved memory location within page 00H)
PTSPREV (L) = xxH (any unreserved memory location within page 00H)
PTSCUR (H) = 1FH (EPA1_TIME)
PTSCUR (L) = 5AH (EPA1_TIME)
PTSCON = C0H (missed-event mode)
PTSCOUNT = FFH (check for 255 events)
Whenever an event occurs on EPA1, the EPA loads the value of the reference timer into the EPA1_TIME register. The PTS uses two temporary registers to calculate the expected next event time. The following steps outline a missed-event PTS cycle.
6-43

8XC196EA USER’S MANUAL
1.EPA1 captures an event and the value of the reference timer is loaded into EPA1_TIME.
2.The PTS subtracts the time of the previous event, which is stored in a memory location pointed to by the PTSPREV register, from the current event-time stored in EPA1_TIME. It then loads the result into a temporary register.
TEMP1 ← (EPA1_TIME) – (PTSPREV)
For example, assume that the previous event occurred at timer value 04H and the current event occurred at timer value 08H. The PTS would load 04H into TEMP1.
3.To calculate the expected next event time, the PTS divides the contents of the temporary register (TEMP1) by two and loads the result into a second temporary register (TEMP2). It then adds the contents of TEMP1 to the contents of TEMP2 and loads the result into TEMP1. Then the PTS adds TEMP1 to the current event-time value to calculate the next event time. It stores this value in TEMP1.
TEMP2 ← TEMP1/2 TEMP1 ← TEMP1 + TEMP2
TEMP1 ← TEMP1 + EPA1_TIME
In the case of our example, TEMP1 would now contain 0EH.
4.The PTS loads the expected next event time into the location pointed to by EPA1_TIME + 4, which in this example, is the address of the EPA0_TIME register.
(EPA0_TIME) ← TEMP1
5.The PTS then loads the current event-time value into the location pointed to by the PTSPREV register.
(PTSPREV) ← (EPA1_TIME)
6.Finally, the PTS decrements the PTSCOUNT register.
PTSCOUNT ← PTSCOUNT – 1
If a match occurs between the reference timer and the contents of EPA0_TIME, EPA0 causes an interrupt which indicates a missed-event. As long as an event occurs on EPA1 before a match occurs between the reference timer and the contents of EPA0_TIME, the PTS cycle repeats until PTSCOUNT decrements to zero. When PTSCOUNT reaches zero, the PTS generates an end-of- PTS interrupt.
6-44

7
I/O Ports